2. SM471_Administrators_Guide(Kor_Ver1).pdf - 第170页
7-22 Samsung Component Place r SM471 Administrator's Guide 그림 7.7 “ Camera No. = Fly Camera “인 경우의 대화상자 <Side> 슬라이더바 Side 조 명값을 설정합니다 . (0 ~ 15) <Outer> 슬 라이더바 Outer 조명값 을 설정합니다 . (0 ~ 15) <Coax…
7-21
부품
등록
먼저 이런 작업이 필요한 특정 부품을 이용하여 장착점을 설정한 후,
이 기능을 사용하는 부품을 이용하여 필요한 만큼 다음 장착점을 생
성합니다.
그러면, 특정 부품
을 먼저 장착한 후, Virtual Pick 으로 특정 부품을
다시 PCB에 밀착시킵니다.
주 의 본 기능의 사용으로 인해 심각한 노즐의 마모가 발생 될 수 있습
니다. 이 기능으로 인한 노즐 마모에 대해서는 당사에서는 일체
의 책임을 지지 않습니다.
<Vacuum Check> 체크박스
부품을 흡착하
거나 장착 할 때, 먼저 공압을 확인하려면 선택합니다. 미
소 칩은 크기가 아주 작기 때문에 실 장착이 완료된 후, 실제 장착이 되지
않더라도 후 공정에서 이런 오류를 검출하기도 어려울 뿐만 아니라, 이
것을 다시 장착하는데도 많은 노력이 필요합니다. (1608칩 이하 적용)
이 기능
을 사용하면, 장비는 부품을 흡착할 때의 압력을 기억하고 부품
을 최종적으로 장착 할 때의 압력을 기억된 압력과 비교하여 차이가 발
생이 되었는지 여부를 확인합니다.
만일, 차이
가 발생되면 헤드가 부품을 흡착해서 장착점으로 이동하는 중
어떤 이유로 인해 떨어졌을 수도 있습니다.
<Use Compatible Camera> 체크박
스
작업의 효율을 위해 부품 등록시, 지정
한 카메라와 FOV가 동일한 카메
라도 작업이 가능하도록 하는 기능입니다. 예를 들면 “Fix Camera1”로
작업하도록 지정된 경우, FOV가 동일한 경우 작업의 효율을 위해 “Fix
Camera2”로 도 작업이 가능하도록 합니다.
7.1.1. 공통Align Data
모든 부품에 대해서 공통적으로 적용되는 Align Data 에 대해서 설명합니다.
<Camera No.> 콤보
박스
Fly
Cam1~Fly Cam5: Head1 ~ Head10 까지의 각 헤드의 Fly Camera입니다.
Fly Cam6~Fly Cam10: Head11 ~ Head20 까지의 각 헤드
의 Fly Camera입니다.
버튼
부품을 인식할 Camera 의 조명
을 설정합니다. 이 버튼을 클릭하면 다음과 같은
대화상자를 표시합니다.
7-22
Samsung Component Placer SM471 Administrator's Guide
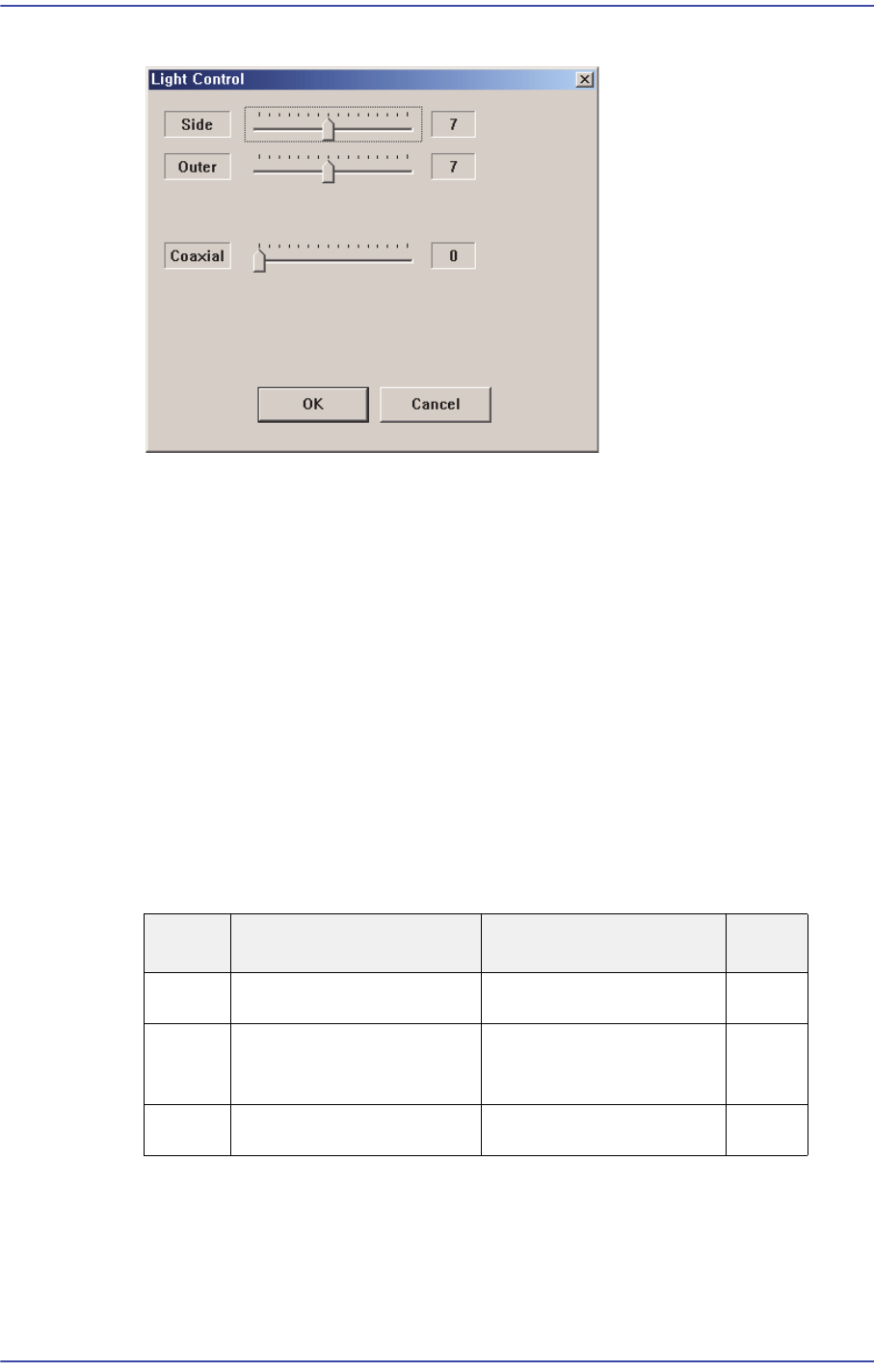
그림
7.7
“
Camera No. = Fly Camera
“인
경우의
대화상자
<Side> 슬라이더바
Side 조
명값을 설정합니다. (0 ~ 15)
<Outer> 슬
라이더바
Outer 조명값
을 설정합니다. (0 ~ 15)
<Coaxial> 슬라
이더바
Coaxial 조
명값을 설정합니다. (0 ~ 15)
<OK
> 버튼
설정한 조명값
을 데이터에 반영하고 대화상자를 닫습니다.
<Ca
ncel> 버튼
설정한 조명값
을 무시하고 대화상자를 닫습니다.
표
7.1
각
조명의
용도
<Size> 영역
<Align Z> 에디
트박스
인식할 높이를 설
정합니다. 부품 바닥면을 기준으로 위쪽을 인식하려는 경
우는 – 값을, 아래쪽을 인식하려는 경우는 +값을 설정합니다.
조 명 용 도
적용부품 비고
Side
부품의 가
장자리를 비춤 Chip, QFP, BGA, SOP등
Outer
부품의 둥근 가
장자리 및
부품의 표면을 비춤
Chip, QFP, BGA, SOP등
Coaxial
부품의 표면을 비춤 Chip, QFP, BGA, SOP등

7-23
부품
등록
<Threshold> 에디트박스
SMVision창을 통해 보여지는 영상은 각각의 픽셀로 구성됩니다. 그 각각의
픽셀은 보여지는 밝기의 정도에 따라0~255까지의 고유한 값을 가집니다.
여기서 ‘임계치’란 각각의 픽셀을 흰색으로 인색할 것인지 검은색으로 인
식할 것인지를 구분하는 경계값을 의미합니다.
에디트박스에 수치를 입력하거나, 우측의 스핀버튼을 클릭하여 값을 조정
할 수 있습니다.
<Auto> 체크박스
<Threshold> 값을 자동으로 설정하는 경우에 체크합니다.
<Tolerance H[+]> 에디트박스
부품의 크기가 입력된 데이터보다 큰 경우 허용할 오차를 백분율 단위로 입
력합니다.
즉, 입력된 데이터의 값보다 실제 부품을 비전으로 인식한 결과의 값이 클 경
우, 입력된 데이터의 1.3배까지 실제 데이터의 값을 허용한다면, 상위 허용
오차는 30%가 됩니다.
<Tolerance L[-]> 에디트박스
부품의 크기가 입력된 데이터보다 작은 경우 허용할 오차를 백분율 단위로
입력합니다.
즉, 입력된 데이터의 값보다 실제 인식된 데이터의 값이 작은 경우, 입력된
데이터의 0.7배까지 실제 데이터의 값을 허용한다면, 하위 허용오차는 30%
가 됩니다.
<Area Margin> 에디트박스
부품을 흡착(Pickup)했을 때, 정상적인 경우에는 흡착된 부품의 중심이
AreaMargin ‘0’ 영역 내에 있어야 합니다. 즉, 부품의 크기에 Area Margin이
더해진 영역을 부품인식영역이라고 한다면 흡착된 부품의 형상은 부품인식
영역내에 있어야 합니다.
다른 외부적인 요인에 의해 흡착된 부품의 중심이 AreaMargin ‘0’ 영역을
벗어났으나, 벗어난 정도를 보정하여 부품을 정상적으로 장착할 수 있는 경
우라면, ‘오차 넓이’를 설정함으로써 기구적인 중심을 기준으로 부품의 중
심을 검사하는 영역을 크게하여 벗어난 부품의 중심을 이 영역내로 포함시
켜서 해당 부품을 정상적으로 장착할 수 있습니다.
부품의X 방향 크기의1/2을 입력합니다. 일반적으로0~6범위 내에서 값을
설정합니다. 디폴트은2입니다.