2. SM471_Administrators_Guide(Kor_Ver1).pdf - 第91页
4-17 Tools 바로가기 메뉴 Head 2/Axis R 헤드 2 의 R 축 홈 위치 에서부터 현재 회전된 각도를 표시합니다 . Head 3/Axis Z <From home sensor> 체크박스가 선택되지 않은 경우 , PCB 상면에서 헤드 3 의 노즐 끝단의 높이를 표시합니다 . Head 3/Axis R 헤드 1 의 R 축 홈 위치 에서부터 현재 회전된 각도를 표시…
4-16
Samsung Component Placer SM471 Administrator's Guide
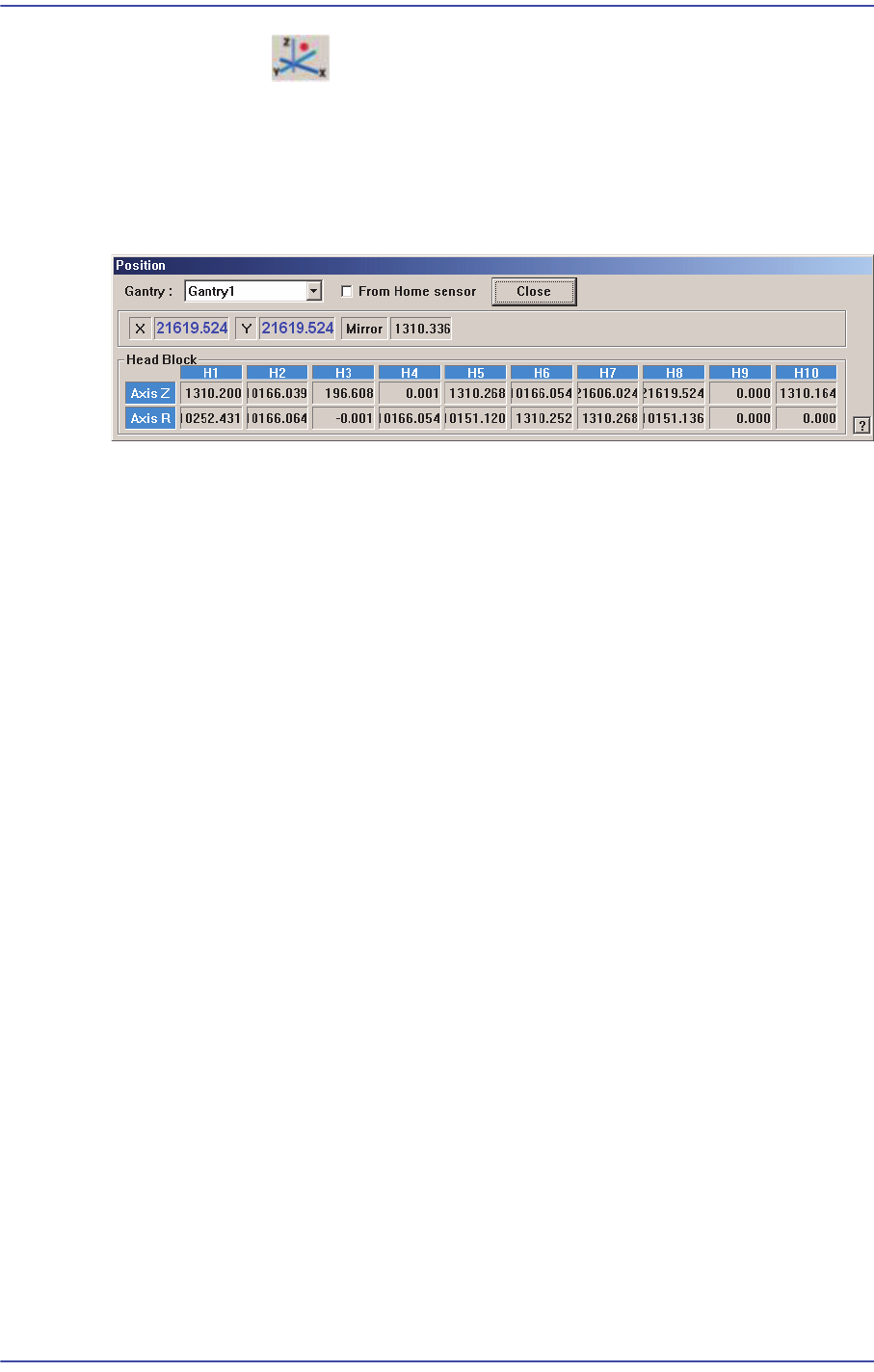
4.6. Current Position
주로 티칭 또는 캘리브레이션시 각 구동축의 현재 좌표를 참고해야 할 필요가 있을
때 사용됩니다. 이 명령을 선택하면 아래와 같은 윈도우가 MMI 기본 화면에 표시됩
니다.
그림
4.6
“
Position
”
대화상자
<Gantry> 콤보박스
좌표를 확인
하려는 Gantry를 선택합니다.(Gantry1, Gantry2)
<F
rom Home sensor> 체크박스
Z축 홈 센서
의 위치로부터 얼마 정도 헤드의 노즐 끝단이 내려왔는지를 알고자
할 때, 이 기능을 사용합니다.
좌표
X [Hea
d1선택시]
기구 원
점에서 Head 1 의X방향 현재 위치를 표시합니다.
Y [Hea
d1선택시]
기구 원
점에서 Head 1 의Y방향 현재 위치를 표시합니다.
Mirror
Fly Camera용Mirror 회
전축의 홈 위치에서부터 현재 회전된 각도를 표시합
니다.
Head Bl
ock 영역
Hea
d 1/Axis Z
<From home sensor> 체
크박스가 선택되지 않은 경우, PCB 상면에서 헤드1
의 노즐 끝단의 높이를 표시합니다.
Hea
d 1/Axis R
헤드1의 R축 홈 위치에
서부터 현재 회전된 각도를 표시합니다.
Hea
d 2/Axis Z
<From home sensor> 체
크박스가 선택되지 않은 경우, PCB 상면에서 헤드2
의 노즐 끝단의 높이를 표시합니다.

4-17
Tools
바로가기
메뉴
Head 2/Axis R
헤드2 의 R 축 홈 위치에서부터 현재 회전된 각도를 표시합니다.
Head 3/Axis Z
<From home sensor> 체크박스가 선택되지 않은 경우, PCB 상면에서 헤드3
의 노즐 끝단의 높이를 표시합니다.
Head 3/Axis R
헤드1 의 R 축 홈 위치에서부터 현재 회전된 각도를 표시합니다.
Head 4/Axis Z
<From home sensor> 체크박스가 선택되지 않은 경우, PCB 상면에서 헤드4
의 노즐 끝단의 높이를 표시합니다.
Head 4/Axis R
헤드4 의 R 축 홈 위치에서부터 현재 회전된 각도를 표시합니다.
Head 5/Axis Z
<From home sensor> 체크박스가 선택되지 않은 경우, PCB 상면에서 헤드5
의 노즐 끝단의 높이를 표시합니다.
Head 5/Axis R
헤드5 의 R 축 홈 위치에서부터 현재 회전된 각도를 표시합니다.
Head 6/Axis Z
<From home sensor> 체크박스가 선택되지 않은 경우, PCB 상면에서 헤드6
의 노즐 끝단의 높이를 표시합니다.
Head 6/Axis R
헤드6 의 R 축 홈 위치에서부터 현재 회전된 각도를 표시합니다.
Head 7/Axis Z
<From home sensor> 체크박스가 선택되지 않은 경우, PCB 상면에서 헤드7
의 노즐 끝단의 높이를 표시합니다.
Head 7/Axis R
헤드7 의 R 축 홈 위치에서부터 현재 회전된 각도를 표시합니다.
Head 8/Axis Z
<From home sensor> 체크박스가 선택되지 않은 경우, PCB 상면에서 헤드8
의 노즐 끝단의 높이를 표시합니다.
Head 8Axis R
헤드8 의 R 축 홈 위치에서부터 현재 회전된 각도를 표시합니다.
Head 9/Axis Z
<From home sensor> 체크박스가 선택되지 않은 경우, PCB 상면에서 헤드9
4-18
Samsung Component Placer SM471 Administrator's Guide
의 노즐 끝단의 높이를 표시합니다.
Hea
d 9/Axis R
헤드9의 R축 홈 위치에
서부터 현재 회전된 각도를 표시합니다.
Hea
d 10/Axis Z
<From home sensor> 체
크박스가 선택되지 않은 경우, PCB 상면에서 헤드10
의 노즐 끝단
의 높이를 표시합니다.
Hea
d 10/Axis R
헤드10의 R축 홈 위
치에서부터 현재 회전된 각도를 표시합니다.
Mirror
Fly Camera용 Mirr
or 회전축의 홈 위치에서부터 현재 회전된 각도를 표시합니다
.
<F
rom Home sensor> 체크박스
Z축 홈 센서
의 위치로부터 얼마 정도 헤드의 노즐 끝단이 내려왔는지를 알고자
할 때, 이 기능을 사용합니다.
<Clo
se> 버튼
Position 대
화상자를 닫고, <Current Position> 명령을 종료합니다.
4.7. Manual Tool
다음과 같은 수동조작을 위해서 이 메뉴를 실행하며, 이 메뉴는 서비스 사용자의 권
한으로 실행이 됩니다.
수
동으로 장비의 각 축 모터를 동작시키고 해당 축의 좌표를 얻기 위해 수행
카
메라의 상태를 점검하거나 비전 이미지를 캡쳐하거나 위해 수행
Camera의 조명
을 점검하거나, Head의 동작에 대한 검사를 수행
4.8. Dump Imformation(Place Error Information)
장착에러로 인해 버려진 부품과 피더에 관한 내용을 표시하는 메시지 창을 확인하
기 위해 사용됩니다.