2. SM471_Administrators_Guide(Kor_Ver1).pdf - 第318页
12-2 Samsung Component Place r SM471 Administrator's Guide <Align Height> 열 부품인식할 때의 Z 축의 위치를 설정합니다 . “ 53.0 ” 는 본 장비에 적용되는 Default 값으로 PCB 상면으로부터 부품을 Align 하는 위치를 의미합니다 . <Use> 열 헤드의 사용유무를 선택할 수 있습니…
12-1
Machine Calibration
제12장. Machine Calibration
12.1. Head [F2]
경 고 지정된 관리자 이외의 사용자가 장비의 설정상태를 변경하면 장
비에 심각한 손상을 입거나 상해를 입을 수 있습니다
반드시 지정
된 관리자 이외에는 장비의 설정상태를 임의로 변경
하지 마십시오.
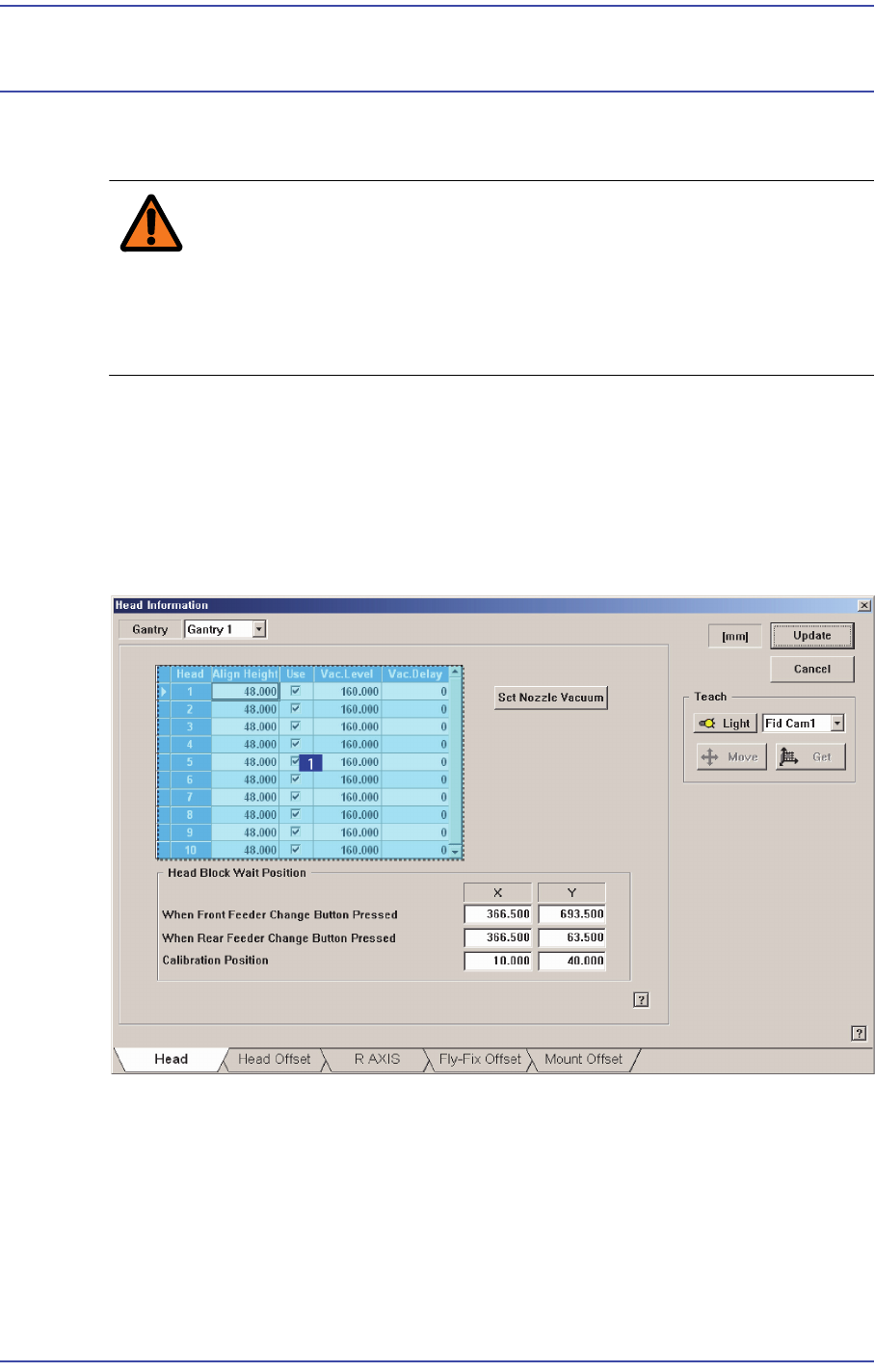
12.1.1. Head 탭 대화상자
Head Assembly의 상태를 표시하고, Head 와 관련된 다양한 설정합니다. 이 버튼을
선택하면 다음과 같은 대화상자가 표시됩니다.
그림
12.1
“
Sys. Setup : Gantry / Head Information
”
대화상자
1: Grid
영역
<Grid> 영역
각 Hea
d의 부품인식 높이를 설정합니다.
<
Head No> 열
Head번호
를 표시합니다.

12-2
Samsung Component Placer SM471 Administrator's Guide
<Align Height> 열
부품인식할 때의 Z축의 위치를 설정합니다.
“53.0”는 본 장비에 적용되는 Default값으로 PCB 상면으로부터 부품을
Align하는 위치를 의미합니다.
<Use> 열
헤드의 사용유무를 선택할 수 있습니다. 만일 Head와 관련된 에러가 발생되
면, 이곳에서 해당 Head를 선택한 것을 제거하여 해당 헤드가 사용되지 않도
록 할 수 있지만, 해당 헤드에 할당된 작업을 재 할당하기 위해서 반드시
Optimizer 프로그램을 재 실행하십시오 .
<Vac.Level> 열
현재 설정된 노즐이 없는 상태에서의 헤드의 공압수준을 표시합니다. 필요
하다면 헤드의 공압수준을 입력하여 현재 설정된 값을 변경할 수 있습니다.
기준값은 160 이며 100~220 사이에 해당값이 존재하면 공압계통에 이상이
없는 것으로 판단합니다.
<Vac.Delay> 열
헤드별로 Vacuum Delay를 다르게 설정하기 위해서 사용됩니다. 어느 특정
헤드가 Solenoid 밸브의 문제로 인해 정상적인 Delay로는 정상적인 작업을
할 수 없다면, 해당 헤드의 <Vac. Delay> 열에 수동으로 특정 Delay값을 입력
하여 사용할 수 있습니다. 그러면, 해당 헤드는 부품 등록시 설정된 Vacuum
Delay 보다 여기에서 설정된 Vacuum Delay 를 우선적으로 적용하여 작업을
수행합니다.
<Set Nozzle Vacuum> 영역
각 헤드의 현재 공압수준을 측정하여 <Grid> 영역의 <Vac.Level> 열 에 표시합
니다. 이 버튼을 클릭하기 전에 먼저 각 헤드의 노즐홀더에 삽입된 노즐을 제거
해야 합니다.
<Head Block Wait Position> 영역
Head Assembly의 대기위치를 설정합니다. 현재 설정된 위치를 변경하려면 해당
위치를 새로 티칭하십시오.
<When Front feeder change button pressed> 에디트박스
장비 전면 운전 패널의 “Front feeder change”버튼을 눌렀을 때, Head
Assembly이 대기할 위치를 설정합니다.
<When Rear feeder change button pressed> 에디트박스
장비 후면 운전 패널의 “Rear feeder change”버튼을 눌렀을 때, Head
Assembly이 대기할 위치를 설정합니다.
<Calibration Position> 에디트박스
12-3
Machine Calibration
캘리브레이션을 수행할 때, Head Assembly가 대기할 위치를 설정합니다.
<Gantry> 콤보박스
헤드관련 설정을 할 Gantry를 선택합니다.
<Teach> 영역
<Device> 콤보박스
XY, Z축 구동모터를 회전시켜 선택된 대상을 지정한 좌표의 위치로 이동시
키거나, 선택된 대상의 현재 좌표를 얻기 위해서 사용됩니다.
Fid Cam2: 전면 갠트리의 ‘Fiducial Camera2’을 선택합니다.
Fid Cam4: 후면 갠트리의 ‘Fiducial Camera4’를 선택합니다.
Head 1 ~ Head 20: 해당 갠트리의 1번 ~ 20번 Head를 선택합니다.
<Move> 버튼
콤보박스에서 선택한 대상을 지정한 좌표의 위치로 이동시킵니다. 이 때,
<Move> 버튼을 클릭하기 전에 원하는 에디트박스를 마우스로 클릭해야 합
니다.
<Get> 버튼
콤보박스에서 선택한 대상을 기준으로 X, Y 좌표를 얻습니다 . 이 때, <Get>
버튼을 클릭하기 전에 원하는 위치에 해당하는 에디트박스를 마우스로 클릭
해야 합니다.
<Update> 버튼
변경한 사항을 장비로 전송하고 대화 상자를 닫습니다.
<Cancel> 버튼
변경한 사항을 무시하고 대화 상자를 닫습니다.
12.1.2. <Head Offset> 탭 대화상자
각 Head의 기구적 특성으로 인한 Offset을 설정합니다. 여기서 나타나는 Z, R축을
제외한 Head Offset 정보는 Camera Calibration 과정 중 Head Offset Calibration을 수행
하고 그 결과값을 반영하면 자동적으로 Update됩니다.
주 의 실제 각 헤드가 장착을 할 때, Offset값이 반영되어서 장착이 되
므로 사용자가 임의로 설정된 값을 변경시키면 헤드의 손상 또
는 작업불량이 발생될 수 있으므로 사용자가 임의로 데이터를
변경하지 마십시오.