2. SM471_Administrators_Guide(Kor_Ver1).pdf - 第180页
7-32 Samsung Component Place r SM471 Administrator's Guide 우는 – 값을 , 아래쪽을 인식하려는 경우는 + 값을 설정합니다 . <Acti on> 영역 <Prepare Manual Pick> 버튼 수동으로 부품을 스핀 들의 노즐 홀더에 삽입된 노즐의 끝단에 흡착시키 기 위해서 Head Assembly 을 Hom…
7-31
부품
등록
방향 체크 할 Body의 Polarity를 설정합니다.
Don’t care
: 방향 체크 할 Body를 Polarity에 관계없이 인식하고자 할
때 선택합니다.
Dark On Light: 방향 체크 할 Body 가 배경보
다 어두운 경우에 선택합
니다.
Light On Dark: 방향 체크 할 Body가 배경보
다 밝은 경우에 선택합니
다.
<Bod
y Score Threshold> 에디트박스
방향 체크 할 Body의 Threshold를 설정
합니다. (0~100)
<Bod
y Sub Sample> 에디트박스
방향 체크 할 Body의 Sampling 정도를 설정합
니다. (0~10, 0 : auto)
<Max Of
fset[100um]> 에디트박스
방향 체크 할 Body의 최대 허용 오차
를 설정합니다. (0~10)
<Outli
ne> 버튼
설정한 Align 데이
터를 사용해서 부품의 외곽형상을 SMVision창에 표시합니다.
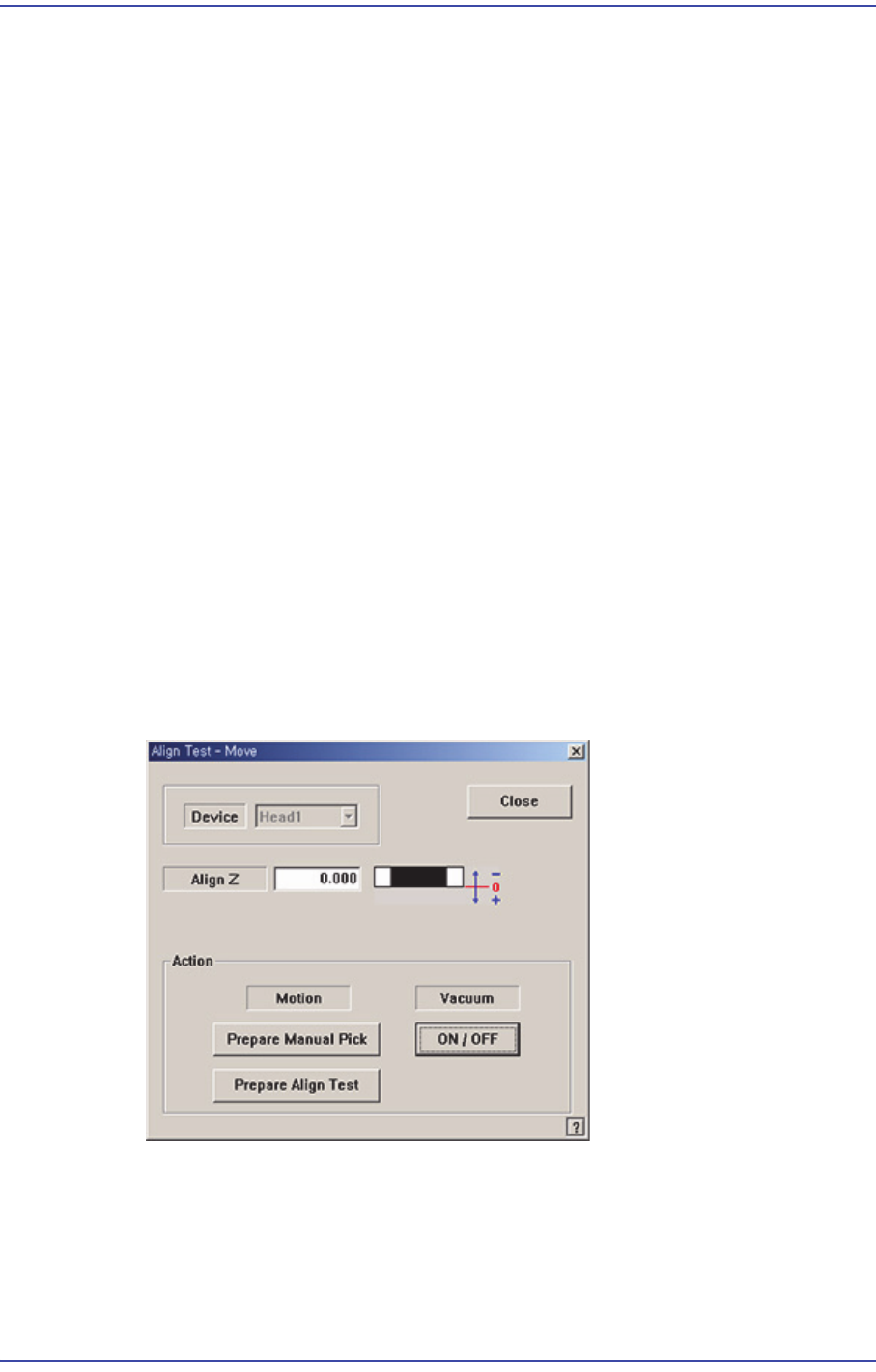
<Move> 버튼
부품을 수
동으로 흡착(Pickup)하여 부품 인식 테스트를 하기 위해서 사용됩니다
. 이 버튼을 클릭하면 다음의 대화상자가 표시됩니다.
<
Device> 콤보박스
부품인식을 위해
서 사용할 카메라를 선택합니다.
<Align Z
> 에디트박스
인식할 높이
를 설정합니다. 부품 바닥면을 기준으로 위쪽을 인식하려는 경
7-32
Samsung Component Placer SM471 Administrator's Guide
우는 – 값을, 아래쪽을 인식하려는 경우는 +값을 설정합니다.
<Acti
on> 영역
<Prepare Manual Pick> 버튼
수동으로 부품을 스핀
들의 노즐 홀더에 삽입된 노즐의 끝단에 흡착시키
기 위해서 Head Assembly 을Home 위치로 이동시킵니다. 이때 , 흡착할
부품에 맞는 노즐이 해당 헤드에 먼저 장착되어 있어야 합니다.
<Prepare Align Test> 버튼
부품 인식 테
스트를 준비합니다. 부품을 인식하는 카메라가 “플라이 카
메라” 인 경우, 스핀들의 노즐 홀더에 삽입된 노즐의 끝단의Z 축 높이를
부품인식 높이(Align Height)로 이동시키고, 미러를 닫은 후, 부품에 조
명을 비춥니다.
부품을 인
식하는 카메라가 “픽스 카메라” 인 경우, 스핀들의 노즐 홀더
에 삽입된 노즐의 끝단의Z 축 높이를 안전 높이로 이동하고, 픽스 카메라
의 위치로 Head Assembly 을 이동한 후, 노즐 끝단의Z축 높이를 부품인
식 높이(Align Height)로 이동시킵니다.
<Vac
uum ON/OFF> 버튼
부품을 노즐 끝단에 흡착시
키거나 노즐에서 제거시키기 위해서 해당 헤
드의 공압을 켜거나 끕니다.
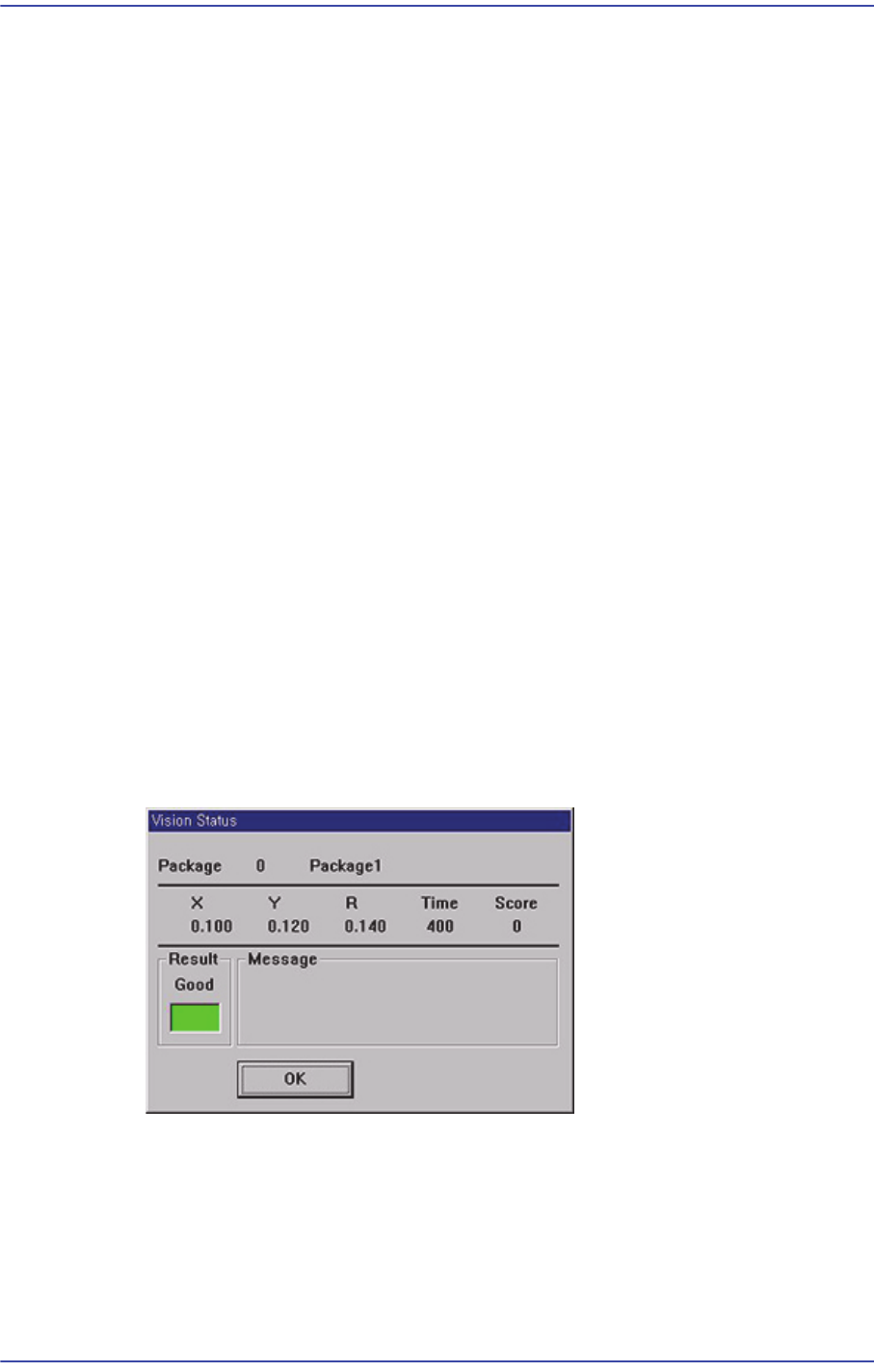
<T
est> 버튼
설정한 Align 데이
터를 사용해서 부품 인식 테스트를 실시합니다. Test가 성공
하면 다음과 같은 창이 표시됩니다.
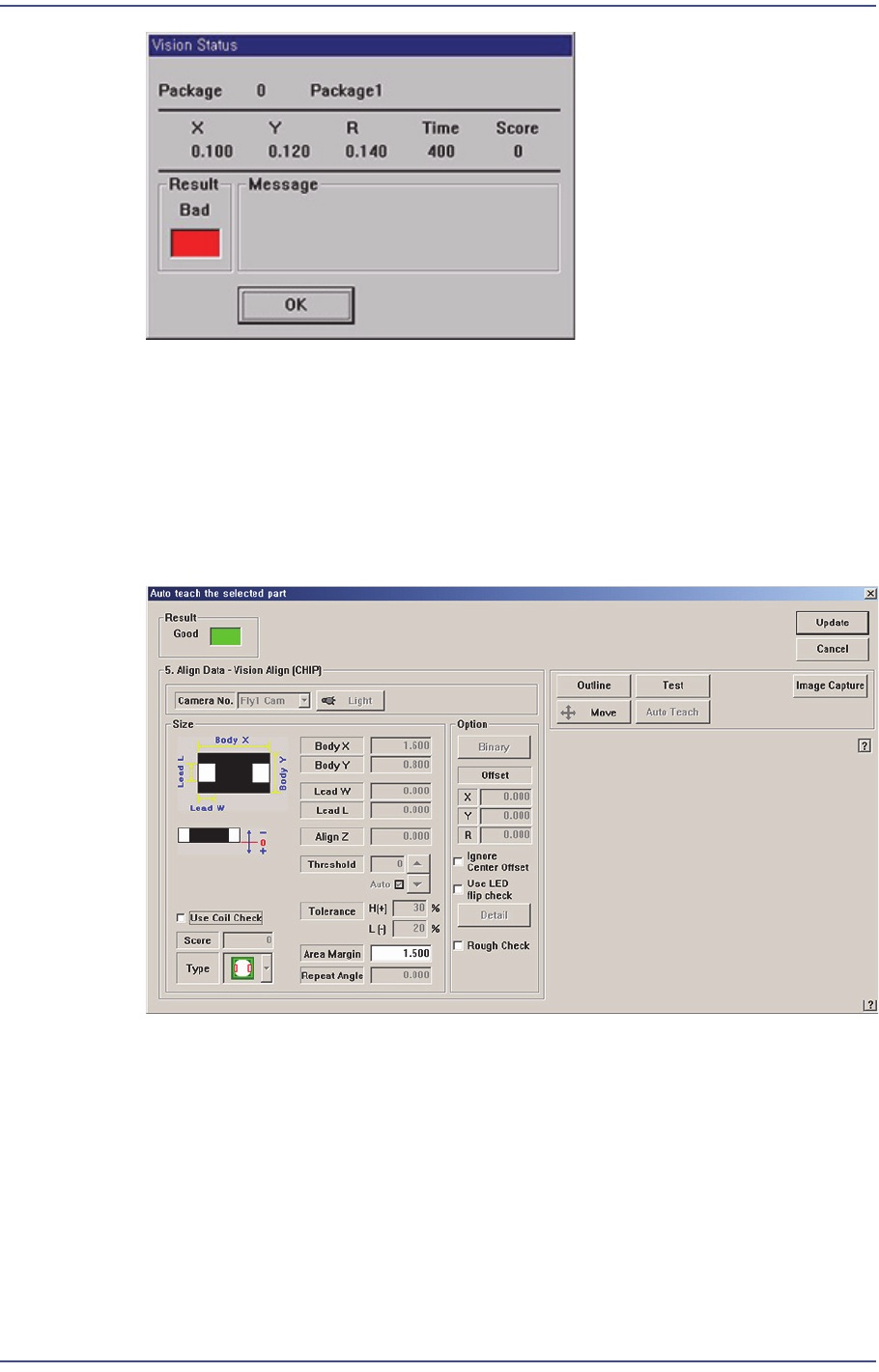
Test가 실패
하면 다음과 같은 창이 표시됩니다 .
7-33
부품
등록
<Auto Teach> 버튼
부품의 Align 데이
터를 자동으로 구합니다. Auto Teach에 성공하면 다음과 같은
대화상자가 표시됩니다.
CHIP-Rect, TR, TR2,BGA, SOP, SOP2, SOJ, SOJ2, QFP, PLCC, Flip-Chip 등에
만
적용됩니다.
그림
7.8
“
Auto Teach the selected part-Good
”
대화상자
<Result>
Auto Teach성공
여부를 표시합니다.
<
Update> 버튼
Auto Teach로 구한 부품의 Ali
gn 데이터를 저장하고, 대화상자를 닫습니다.
<
Cancel> 버튼
Auto Teach로 구한 부품의 Ali
gn 데이터를 무시하고, 대화상자를 닫습니다.
<Align Data>영역