00191368-01.pdf - 第193页
Betriebsanleitung HS-50 6 Visionfunktionen Software-Version 5.01 A usgabe 01/99 6.1 Die Visionsysteme am Automaten 191 /HJHQGH]X$ EE (1) 12e r Revo lver kopf /D LM1 (2) B E-Kamer a 24 x 24 (3) B E-Beleu cht…
6 Visionfunktionen Betriebsanleitung HS-50
6.1 Die Visionsysteme am Automaten Software-Version 5.01 Ausgabe 01/99
190
/HJHQGH]X$EE
(1) Portal 1 mit Revolverkopf DLM1, BE- und LP-Visionsystem
(2) Portal 2 mit Revolverkopf DLM1, BE- und LP-Visionsystem
(3) Portal 3 mit Revolverkopf DLM1, BE- und LP-Visionsystem
(4) Portal 4 mit Revolverkopf DLM1, BE- und LP-Visionsystem
9LVLRQDXVZHUWHHLQKHLWHQ
Die beiden Visionauswerteeinheiten stecken im Steuereinschub (siehe Pos. 1 und 2 in Abb.
6.1 - 4). BE- und LP-Kameras und die Visionauswerteeinheiten bilden zusammen das Visi-
onsystem.
Die elektrischen Bildsignale der BE- und LP-Kamerasysteme werden an die Visionauswerte-
einheiten übertragen (siehe Pos. 1 und 2 in Abb. 6.1 - 4). Dort werden die gemessenen Werte
mit den synthetischen Werten der Bauelementebeschreibung bzw. der LP-Paßmarken vergli-
chen. Daraus werden die Korrekturfaktoren für die einzelnen Bestückpositionen errechnet.
Die Bauelemente werden überdies aufgrund ihrer Gehäuseformen identifiziert. Stimmen syn-
thetisches Modell und Messung der Gehäuseform nicht überein, wird das Bauelement nicht
bestückt.
Mit dem LP-Visionsystem ist auch eine Lageerkennung der Zuführmodule möglich. Paßmar-
ken auf den Zuführmodulen dienen zur Ermittlung der Lageabweichung der einzelnen Zuführ-
module. Auf diese Weise läßt sich die Abholsicherheit gerade bei kleinen Bauelementen
deutlich steigern.
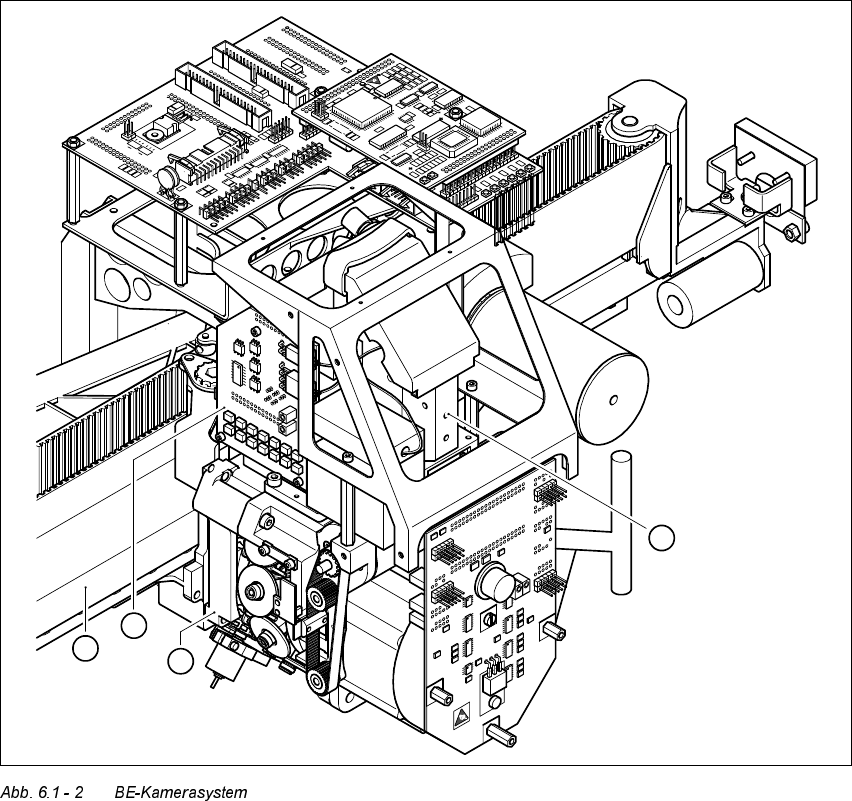
%(.DPHUDV\VWHPGHV5HYROYHUNRSIHV
Das BE-Kamerasystem (siehe Pos. 2 in Abb. 6.1 - 2) besteht im wesentlichen aus folgenden
Baugruppen:
– Optisches Linsensystem
– CCD-Chip zur Erstellung eines elektronischen Abbilds des Bauelements
– CCD-Kameraverstärker
– Drei Beleuchtungsebenen - flach, mittel und steil - zur optimalen Ausleuchtung der un-
terschiedlichsten Bauelementeformen
– Platine "Beleuchtungssteuerung" zur Einstellung der Intensitäten der einzelnen Be-
leuchtungsebenen
Betriebsanleitung HS-50 6 Visionfunktionen
Software-Version 5.01 Ausgabe 01/99 6.1 Die Visionsysteme am Automaten
191
/HJHQGH]X$EE
(1) 12er Revolverkopf /DLM1
(2) BE-Kamera 24x24
(3) BE-Beleuchtungssteuerungsplatine
(4) Portal
Das BE-Kamerasystem ist an der Oberseite des Revolverkopfes mit vier Innensechskant-
schrauben befestigt. Zwei Zylinderstifte fixieren seine Position.
Mit dem BE-Kamerasystem lassen sich Bauelemente der Größe 0402 bis einschließlich SO32
optisch zentrieren und bestücken. Die Bauelementegröße variiert also zwischen 1,0 mm x
0,5 mm und max. 18,7 mm x 18,7 mm, die Bauelementedicke zwischen 0,3 mm und 6 mm.
Das minimale Beinchenrastermaß darf 0,5 mm betragen.
2
1
3
4
6 Visionfunktionen Betriebsanleitung HS-50
6.1 Die Visionsysteme am Automaten Software-Version 5.01 Ausgabe 01/99
192
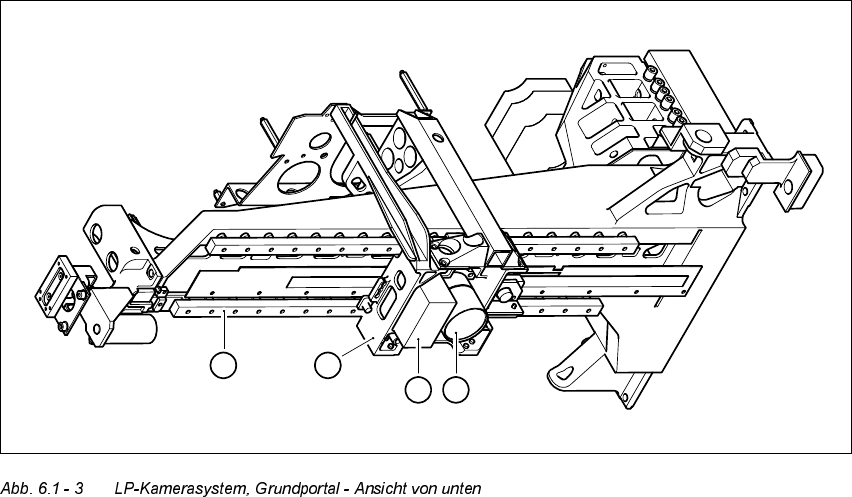
/3.DPHUDV\VWHPH
/HJHQGH]X$EE
(1) LP-Kamera - Optik und Beleuchtung
(2) Kameraverstärker
(3) Kopfhalterung
(4) Portal
Das LP-Kamerasystem (siehe Pos. 1 und 2 in Abb. 6.1 - 3) besteht im wesentlichen aus fol-
genden Komponenten:
– Optisches Linsensystem
– CCD-Chip
– CCD-Kameraverstärker
– Eine Beleuchtungsebene zur Beleuchtung von LP-Marken und Inkpunkten
Das LP-Kamerasystem ist auf der Unterseite des Portals an der Revolverkopfhalterung befe-
stigt. Es zentriert standardmäßig Leiterplatten einer Größe von 50 mm x 50 mm bis 368 mm
x 460 mm (2" x 2" bis 14,5" x 18"). Die Leiterplattenstärke darf sich dabei im Bereich zwischen
0,5 mm und 4,5 mm bewegen.
1
2
4
3