00191368-01.pdf - 第298页
6 Visionfunktionen Betriebsanleitung HS-50 6.6 Bauelement testen Software-Version 5.01 Ausgabe 01/99 296 Folgende K ombina tionen vo n Meßmet hoden we rden ang ewandt: – Size driv en — cor ner driv en — lead driven ( sie…

Betriebsanleitung HS-50 6 Visionfunktionen
Software-Version 5.01 Ausgabe 01/99 6.6 Bauelement testen
295
(UOlXWHUXQJHQ]XU 0HPHWK RGLN
Die Bauelementezentrierung basiert für herkömmliche Bauelemente mit Beinchenanschlüs-
sen im wesentlichen auf vier Meßmethoden, um die Position (x, y-Koordinate,
Φ
= Drehwinkel)
des Bauelements und die Beinchenparameter zu bestimmen:
– Size driven Modus
– Row driven Modus
– Corner driven Modus
– Lead driven Modus
Für BGAs (B
all Grid Arrays) und Flip-Chips wurden neue Algorithmen implementiert, um die
Position (x-, y-Koordinate,
Φ
= Drehwinkel) des Bauelements und die ’Ball’-Parameter zu be-
stimmen (siehe Abschnitt 6.6.4.4, Seite 6 - 271):
– Grid driven Modus
– Ball driven Modus
Gemäß Ihren Vorgaben kann jede Meßmethode innerhalb dieser Sequenz ausgelassen wer-
den. Eine Änderung im Ablauf dieser Folge ist aber nicht möglich.
'HILQLWLRQGHU0HPHWKRGHQ
– 6L]HGULYHQ
Diese Meßmethode wurde speziell für kleine Bauelemente entwickelt. Aufgrund der Infor-
mation über Dimensionsparameter wird auf schnelle und zuverlässige Weise die Position
und die Rotation kleiner Bauelemente ermittelt.
'DV9HUIDKUHQLVWVHKUUREXVWJHJHQEHU6W|UXQJHQZLH)DUEPDUNLHUXQJHQ
Size driven bedient sich der Profilbildung. Sie können die Profilbildung entweder entlang
der Länge RGHU der Breite der Bauelemente durchführen. Die entsprechende Wahl können
Sie im Optionsfeld ankreuzen. Standardmäßig wird die Profilbildung immer der längeren
Seite nachgebildet.
– 5RZGULYHQ
Diese Meßmethode basiert auf der Information einer Beinreihe.
6LHLVWVHKUVFKQHOOXQGHUJLEWXQ JHIlKUH:HUWHIUGLH.RRUGLQDWHQXQGGHQ'UHKZLQNHO
GHV%DXHOHPHQWV
– &RUQHUGULYHQ%DXHOHPHQWHLQVSHNWLRQ
Die Meßresultate liefern eine genaue Angabe über die Koordinaten und Rotation des Bau-
elements, der Beinchenanzahl, der Teilung und des Reihenversatzes.
'LHVH0HWKRGHLVWXQHPSIL QGOLFKJHJHQEHU6FKZDQNXQJHQYRQ%HLQFKHQG LPHQVLRQHQ
– /HDGGULYHQ%HLQFKHQLQVSHNWLRQ
Mit dieser Methode wird die Information aus der Untersuchung jedes einzelnen Beinchens
gewonnen.
6 Visionfunktionen Betriebsanleitung HS-50
6.6 Bauelement testen Software-Version 5.01 Ausgabe 01/99
296
Folgende Kombinationen von Meßmethoden werden angewandt:
– Size driven — corner driven — lead driven (siehe Tabelle in Abschnitt 6.6.4.15) oder
– Row driven — corner driven — lead driven (siehe Tabelle in Abschnitt 6.6.4.15)
– *ULGGULYHQ%DXHOHPHQWHLQVSHNWLRQDP)
E]Z) $XWRPDWHQ
Die Meßresultate liefern Angaben über Grobkoordinaten und Grobverdrehung des Bauele-
ments. Darüber hinaus erhalten Sie eine Aussage über die Qualität der Messung.
– %DOOGULYHQ%HVWLPPXQJGHU%DOOSRVLWLRQDP)
E]Z) $XWRPDWHQ
Die Meßresultate liefern genaue Angaben über Position und Verdrehwinkel des Bauele-
ments. Darüber hinaus erhalten Sie eine Aussage über den maximalen Ballversatz und die
Qualität der Messung.
(PSIHKOXQJHQIUGLHRSWLPDOH6HTXHQ]YRQ0HPHWKRGHQ
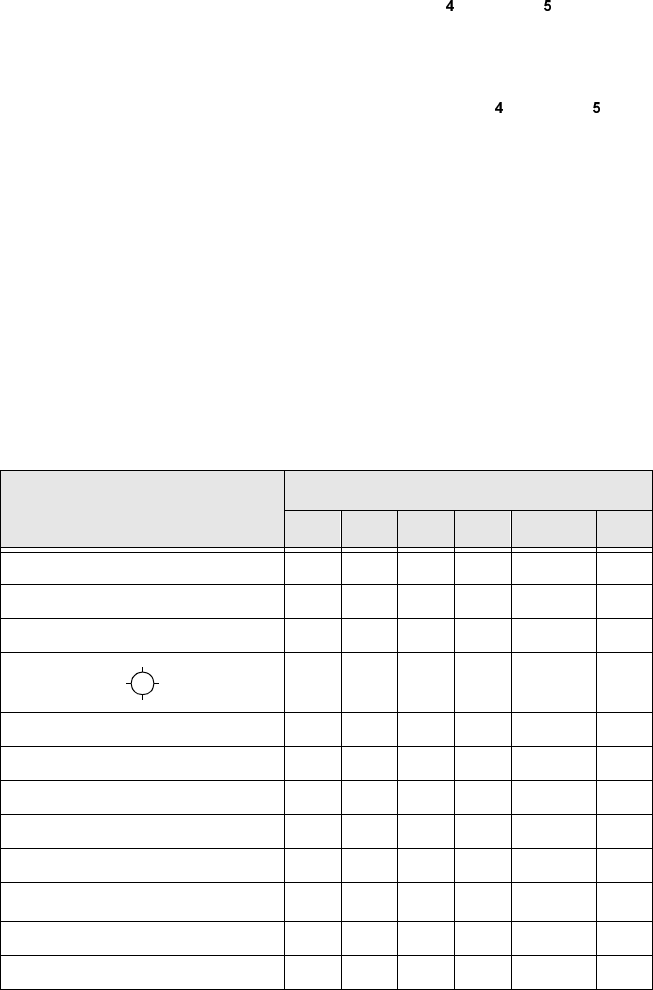
In der nachfolgenden Tabelle geben wir Ihnen Empfehlungen an die Hand für die optimale Se-
quenz von Meßmethoden für Bauelemente: Dabei gelten folgende Abkürzungen:
B = ball driven C = corner driven G = grid driven
L = lead driven R = row driven S = size driven
*) L bei unregelmäßigen Bauelementen mit separaten Fenstern
%DXHOHPHQW
0HIROJH
6 5 * & / %
MELF S L
CHIP S L
SOT S C L
SL
SOJC6 S C
SOJC14 R C
LCC R C L
PLCC R C L
QFP R C L
TAB R C
L
*)
BGA, Flip-Chip S G B
Bare dies S
Betriebsanleitung HS-50 6 Visionfunktionen
Software-Version 5.01 Ausgabe 01/99 6.6 Bauelement testen
297
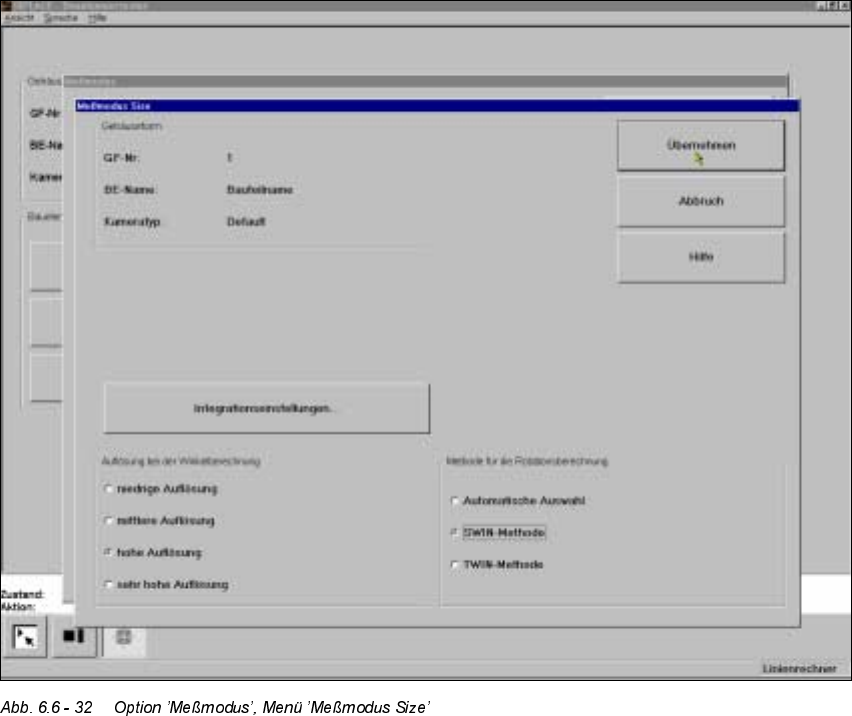
0HPRGXV¶6 L]H¶
Nach Anklicken der Schaltfläche ’Einstellen’ des Meßmodus ’Size’ wird das Menü ’Meßmodus
Size’ am Bildschirm eingeblendet.
In diesem Menü haben Sie die Möglichkeit,
– die Auflösung der Winkelberechnung zu variieren.
– die Methode für die Rotationsberechnung festzulegen und
– die Integrationseinstellungen zu variieren.
$ XIO|VXQJEHLGHU:LQNHOEHUHFKQXQJ
Wird bei diesem Meßmodus die BE-Verdrehung aufgrund von Mehrdeutigkeiten falsch ermit-
telt, können Sie die Winkelauflösung zur Drehwinkelermittlung erhöhen. In Abhängigkeit von
der Auflösung werden zur Winkelbestimmung des Bauelements folgende Schrittweiten ver-
wendet: