00191368-01.pdf - 第44页
1 Einleitung Betriebsanleitung SIPLACE HS-50 1.13 Baugruppenübersicht - Revolverkopf S oftwareversion SR.501.xx Ausgabe 01/99 42 Alle Bau eleme nte werden mit de r gleic hen T aktzei t bestüc kt. Be vor das Bauel ement b…
Betriebsanleitung SIPLACE HS-50 1 Einleitung
Softwareversion SR.501.xx Ausgabe 01/99 1.13 Baugruppenübersicht - Revolverkopf
41
%DXJUXSSHQEHUVLFKW5HYROYHUNRSI
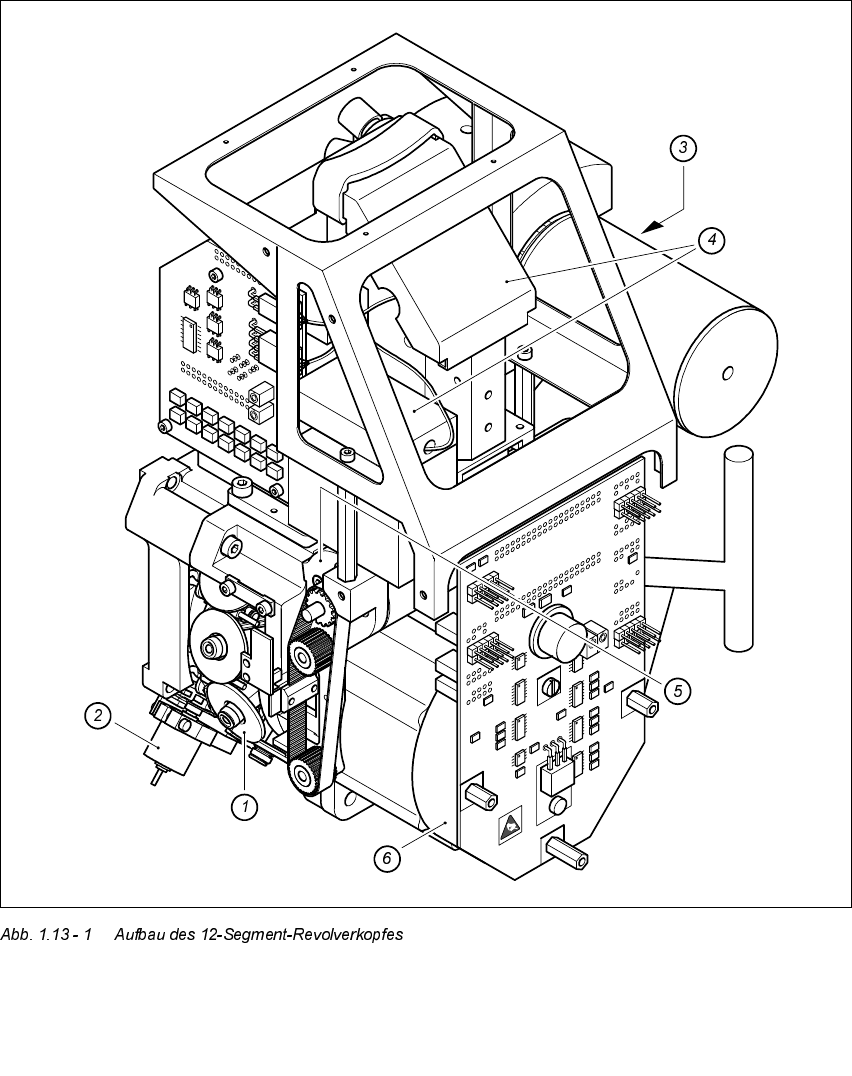
$XIEDXGHV 6HJ PHQW5HYROYHUNRSIHV
1. Stern mit 12 Pinolen 4. BE-Visionsystem
2. Motor, Ventilstellantrieb "Abwurf" 5. Z-Achsantrieb
3. Drehstation 6. Sternmotor
1 Einleitung Betriebsanleitung SIPLACE HS-50
1.13 Baugruppenübersicht - Revolverkopf Softwareversion SR.501.xx Ausgabe 01/99
42
Alle Bauelemente werden mit der gleichen Taktzeit bestückt. Bevor das Bauelement bestückt
wird, wird es mit dem Visionsystem optoelektronisch vermessen.
– Die BE-Visionkamera erstellt ein Abbild des aufgenommenen Bauelements.
– Zudem wird die genaue Lage des Bauelements bestimmt.
– Die Gehäuseform des aufgenommen Bauelements wird mit der programmierten Gehäuse-
form verglichen, um das Bauelement zu identifizieren. Nicht identifizierte Bauelemente
werden abgeworfen.
– Die Drehstation dreht das Bauelement in die geforderte Bestücklage.
%HVFKUHLEXQJGHV6HJ PHQW5HY ROYHUNRSIHV
– Der 12-Segment-Revolverkopf arbeitet nach dem Collect & Place - Prinzip, d. h. die Bau-
elemente werden mit Hilfe eines Vakuums von den Pipetten aufgenommen und nach ei-
nem kompletten Aufnahmezyklus mit Hilfe von Blasluft sanft und positionsgenau auf die
Leiterplatte aufgesetzt. Zugleich wird das Vakuum in den Pipetten mehrmals überprüft um
festzustellen, ob die Bauelemente auch korrekt abgeholt bzw. aufgesetzt wurden.
– Der "lernfähige" Sensorstopp-Modus der z-Achse gleicht LP-Unebenheiten beim Absetzen
der Bauelemente aus.
– Fehlerhafte Bauelemente werden abgeworfen und in einem Reparaturlauf nachbestückt.
7HFKQLVFKH'DWHQ5HYROYHUEHVWFNNRSI
Bauelementespektrum
0402 bis PLCC44, inkl. BGA, µBGA, Flip-Chip, TSOP,
QFP, PLCC, SO bis SO32, DRAM
Max. Höhe 6 mm
Min. Beinchenraster 0,5 mm
Min. Abmessungen 0,5 mm x 1,0 mm
Max. Abmessungen 18,7 mm x 18,7 mm
Max. Gewicht 2 g
Max. Hub der z-Achse 16 mm
Programmierbare Aufsetzkraft 2,4 bis 5,0 N
Pipettentypen 7xx
Benchmark-Bestückleistung 12.500 BE/h
Winkelgenauigkeit 0,7° bei 4 Sigma
Bestückgenauigkeit ± 90 µm bei 4 Sigma
± 135 µm bei 6 Sigma
Betriebsanleitung SIPLACE HS-50 1 Einleitung
Softwareversion SR.501.xx Ausgabe 01/99 1.14 Baugruppenübersicht - Visionsysteme
43
%DXJUXSSHQEHUVLFKW9LVLRQV\ VWHPH
Jeder Automat besitzt
– vier BE-Visionkameras an den Bestückköpfen und
– vier LP-Visionkameras an den Portalunterseiten der x-Achsen.
Die Visionauswerteeinheiten sind im Steuereinschub der Automaten untergebracht. Mit Hilfe
des BE-Visionsystems wird
– die genaue Position des Bauelements an der Pipette und
– die Geometrie der Gehäuseform bestimmt.
Das LP-Visionsystem ermittelt mit Hilfe von Paßmarken auf den LPs
– die Lage der Leiterplatte,
– ihren Verdrehwinkel
– und den Verzug der Leiterplatte.
Darüber hinaus ermittelt das LP-Visionsystem mit Hilfe von Paßmarken auf den Zuführmodu-
len die exakte Abholposition von Bauelementen. Dies ist insbesondere für kleine Bauele-
mente wichtig.
7HFKQLVFKH'DWHQ%(9LVLRQPRGXODP6HJPHQW5HYROYHUNRSI
Max. BE-Maße 18,7 mm x 18,7 mm
BE-Spektrum 0402 bis PLCC44
inkl. BGA, µBGA, Flip-Chip, TSOP, QFP
PLCC, SO bis SO32, DRAM
Beinchenteilung > = 0,5 mm
Gesichtsfeld 24 mm x 24 mm
Beleuchtungsart Auflicht (3 frei programmierbare Ebenen)