00191368-01.pdf - 第206页
6 Visionfunktionen Betriebsanleitung HS-50 6.2 LP-Visionsystem Software-Version 5.01 Ausgabe 01/99 204 – Korrektu r bei zwe i Markenx -Lage y-Lage V erdr ehung der Leiterp latte – Korrektu r bei drei Marken: Idealerwe is…
Betriebsanleitung HS-50 6 Visionfunktionen
Software-Version 5.01 Ausgabe 01/99 6.2 LP-Visionsystem
203
–Dicke (d)
Insbesondere bei Marken aus Zinn sollten Sie darauf achten, daß eine Wölbung von 1/10
der Strukturbreite nicht überschritten wird. Wird dieses Wölbungsmaß überschritten, kann
unter Umständen die Marke nicht gleichmäßig ausgeleuchtet werden. Die Folge sind un-
terschiedliches Reflexionsverhalten und Störreflexionen. Eine Erkennung der Marken ist
dann nicht mehr gewährleistet.
(PSIRKOHQH0DUNHQDEPHVVXQJHQ
%HZHUWXQJGHU0DUNHQIRUPHQ
Bei verzinnten Strukturen und hoher Dimensionsstabilität (geringe Ätzschwankungen) können
Vollkreis bzw. Vollquadrat als sehr günstige Markenformen angesehen werden (Verhältnis
Markendicke zu Vorbelotungsstärke groß!). Nimmt die Dimensionsstabilität ab, so ist der Voll-
kreis dem Quadrat vorzuziehen.
Für die Markenformen Einfach- und Doppelkreuz ist Kupfer blank vorteilhaft, sofern die Oxi-
dation noch nicht zu fortgeschritten ist.
± 2EHUIOlFKHGHU0DUNHQ
Achten Sie auf eine möglichst ebene, gering oxidierte Markenoberfläche. Vermeiden Sie
Benetzung der Marke mit Lötstopplack, da sich sonst der Kontrast gegenüber dem Unter-
grund verringert oder Störreflexionen auftreten können. Ähnliche Effekte entstehen auch
bei verzinnten Marken.
– .RQWUDVWGHU0DUNHQ
Wählen Sie für eine gute Markenerkennung einen starken Helligkeitskontrast zwischen
Marke und Basismaterial, d. h. helle Marken auf dunklem Basismaterial und umgekehrt.
Tragen Sie zum Beispiel auf Kupfer- oder Zinnuntergrund dunkle Marken auf. Bei Keramik-
substraten mit heller Oberfläche und ungünstigen Reflexionseigenschaften hilft oftmals,
dunkles Widerstandsmaterial unterzulegen, um das Kontrastverhalten zu verbessern.
– $Q]DKOGHU0DUNHQ
Bei der Verwendung von Keramiksubstraten und kleinen Leiterplatten genügt es in der Re-
gel, zwei Paßmarken aufzutragen. Bei größeren Leiterplatten empfiehlt es sich allerdings,
drei Marken zu definieren. Die einzelnen Marken können unterschiedliche Strukturen auf-
weisen. Sie vereinfachen aber die Erkennungsmethodik, wenn Sie für jede Marke dieselbe
Struktur verwenden.
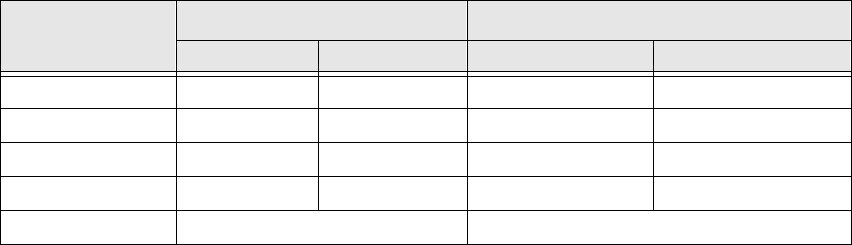
0DUNHQW\S
(LQIDFKNUHX] 'RSSHONUHX]
Bereich Idealbereich Bereich Idealbereich
Länge (l) 0,9 mm (min) 2,0 mm 1,8 mm 2,75 mm
Breite (b) 0,9 mm (min 2,0 mm 1,8 mm 2,75 mm
Strichstärke (s) 0,3 - 1,4 mm 0,5 mm 0,3 - 0,75 mm 0,5 mm
Strichabstand (a) — — 0,5 mm (min) 0,75 mm
Dicke (d) < 1/10 der Strukturbreite < 1/10 der Strukturbreite

6 Visionfunktionen Betriebsanleitung HS-50
6.2 LP-Visionsystem Software-Version 5.01 Ausgabe 01/99
204
– Korrektur bei zwei Markenx-Lage
y-Lage
Verdrehung der Leiterplatte
– Korrektur bei drei Marken: Idealerweise liegen die Geraden durch je zwei Markenzen-
tren parallel zu x- und y-Achsex-Lage
y-Lage
Verdrehung der Leiterplatte
Scherung
Verzug der LP in x-Richtung
Verzug der LP in y-Richtung
HINWEIS
Sie dürfen auf keinen Fall 3 Marken so positionieren, daß sie auf einer Geraden liegen.
– $EVWDQGGHU0DUNHQ]XHLQDQGHU
Die Marken können Sie beliebig auf die Leiterplatte verteilen. Sinnvoll ist es, wenn die Ab-
stände der Marken an den beiden Achsen möglichst groß sind. Je weiter die Paßmarken
auseinander liegen, umso genauer sind die optische Lage- und Winkelbestimmung.
Betriebsanleitung HS-50 6 Visionfunktionen
Software-Version 5.01 Ausgabe 01/99 6.3 BE-Visionsystem
205
%(9 LVLRQV\VWHP
Das BE-Visionsystem erfaßt die genaue Lage eines Bauelements, indem es zum einen den
Versatz des Bauelementezentrums relativ zur Symmetrieachse der Pipette, zum anderen den
Drehwinkelversatz zur Relativdrehstellung der Pipette ermittelt. Die Zustandsanalyse der
Beinchenkonfiguration in x- und y-Richtung ist ebenfalls möglich.
%(9LVLRQV\VWHPGHV%HVWFNDXWRPDWHQ
6\VWHPEHVFKUHLEXQJ
Das BE-Visionsystem besteht aus dem optischen System zur Lageerkennung der Bauele-
mente und der Visionauswerteeinheit.
Jeder 12er Revolverbestückkopf besitzt ein eigenes BE-Lageerkennungssystem in Sternstat-
ion 7 (siehe Abb. 6.1 - 2, Seite 6 - 191). Jeder Automat verfügt über eine Auswerteeinheit zur
LP- und BE-Lageerkennung im Steuereinschub (siehe Abb. 6.1 - 4, Seite 6 - 194).
Eine CCD-Kamera mit Umlenkspiegel, Abbildungsoptik und LED-Beleuchtungssystem bildet
das optische BE-Lageerkennungssystem. Das nutzbare Gesichtsfeld der CCD-Kamera
(SONY-Kamera XC75) beträgt 24 x 24 mm². Zur Lageerkennung bzw. zum Beinchentest wird
das BE im Auflichtverfahren von den LED-Zeilen gleichmäßig ausgeleuchtet und mit der Optik
auf den CCD-Chip scharf abgebildet. Mit Methoden der digitalen Bildverarbeitung, HALE-Ver-
fahren (H
igh Accuracy Lead Extraction) werden die Parameter für Lage, Verdrehwinkel und
Beinchenzustand ermittelt.
Die Visionauswerteeinheit (MVS) wurde schon in Abschnitt 6.1.3, Seite 6 - 193 beschrieben,
da sie ja beide Funktionen von LP- und BE-Auswertung übernimmt.
7HFKQLVFKH'D W HQ
Kamera-Typ: SONY XC75
Anzahl der Pixel: 484 x 484
Gesichtsfeld: 24 mm x 24 mm
Beleuchtungsmethode: Auflichtverfahren (Rotlicht), 3 LED-Ebenen
Bildverarbeitung: HALE - Grauwertverfahren (H
igh Accuracy Lead Extraction)
Bildschirm: RGB - Monitor (VGA-Modus) 640 x 484 Pixel
BE-Größen: 0,5 mm x 0,5 mm ... 18,7 mm x 18,7 mm
Spektrum der erkennbaren Bauelemente:TSOP, LCC, PLCC, QFP, SO-Serien bis SO28
grundsätzlich alle Bauelemente mit J- und
Gullwing-Beinchen,
µ
BGAs