00191368-01.pdf - 第209页
Betriebsanleitung HS-50 6 Visionfunktionen Software-Version 5.01 A usgabe 01/99 6.3 BE-Visionsystem 207 /HJHQGH]X$ EE (1) S ymmetri eachse .ULWHULH QIUXQUHJHO PlLJH%DXHOHPHQWH Definitio n Ein Baue …
6 Visionfunktionen Betriebsanleitung HS-50
6.3 BE-Visionsystem Software-Version 5.01 Ausgabe 01/99
206
Minimaler Beinchenabstand:0,3 mm
Minimaler Balldurchmesser bei
µ BGAs
: 250 µm
)XQNWLRQVEHVFKUHLEXQJ
Ein Segment des 12er Bestückkopfes nimmt an der Sternstation 1 ein Bauelement auf. Der
Stern taktet weiter, weitere Bauelemente werden aufgenommen. In Sternstation 7 befindet
sich die optische Einheit des BE-Visionsystems. Dort angekommen leuchten drei räumlich
versetzte LED-Reihen das Bauelement mit Rotlicht gleichmäßig aus. Die Optik bildet Bauele-
mente bis zu einer Höhe von 5 mm scharf auf den CCD-Chip der Kamera ab.
Die von der Bauelementekamera erzeugte digitale BE-Abbildung wird in die Visionauswerte-
einheit übertragen. Mit Hilfe von Methoden der digitalen Bildverarbeitung (HALE-Verfahren)
vergleicht die Auswerteeinheit die BE-Abbildung mit einem zuvor im GF-Editor (Gehäuse-
form) erzeugten synthetischen Modell. Die daraus gewonnenen Parameter liefern Aussagen
zu Positionsabweichungen, Verdrehwinkel, Beinchenzustand und BE-Reidentifikation. Das
HALE-Verfahren hat sich als sehr robust gegenüber Störeinflüssen wie Störreflexionen, un-
terschiedlichem Reflexionsverhalten von Beinchen, Streulichteinflüssen usw. erwiesen. Es ist
genauer und schneller als das Matching-Verfahren. Nach erfolgreicher Messung dreht das
Segment das Bauelement in Sternstation 9 in die korrekte Bestückrichtung. In Sternstation 1
wird das Bauelement dann lagekorrekt auf die Leiterplatte bestückt.
.ULWHULHQ]XU(UIDVVXQJYRQ%DXHOHPHQWHQ
)RUPGHU%DXHOHPHQWH
Mit der optischen Bauelementezentrierung können neben regelmäßigen auch unregelmäßige
Bauelemente zentriert werden. Als maximale Beinchenanzahl sind für die horizontale bzw.
vertikale Richtung jeweils 99 Beinchen zugelassen.
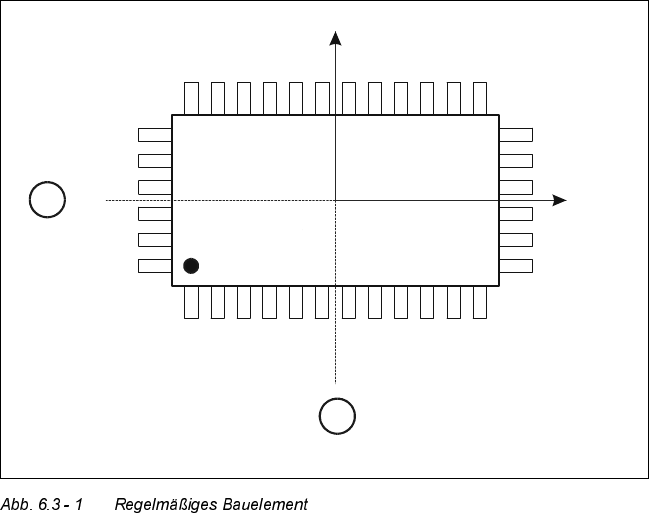
.ULWHULHQIUUHJHOPlLJH%DXHOHPHQWH
Definition
Ein Bauelement wird als regelmäßig bezeichnet, wenn folgende vier Bedingungen erfüllt sind:
– rechteckige Gehäuseform (Sonderfall: quadratische Form)
– nur ein Beinmodell (lead-type)
– nur eine Beingruppe pro Seite
– Die gegenüberliegende Beingruppen sind jeweils symmetrisch zu den beiden Hauptach-
sen
(x-, y-Achse).
Betriebsanleitung HS-50 6 Visionfunktionen
Software-Version 5.01 Ausgabe 01/99 6.3 BE-Visionsystem
207
/HJHQGH]X$EE
(1) Symmetrieachse
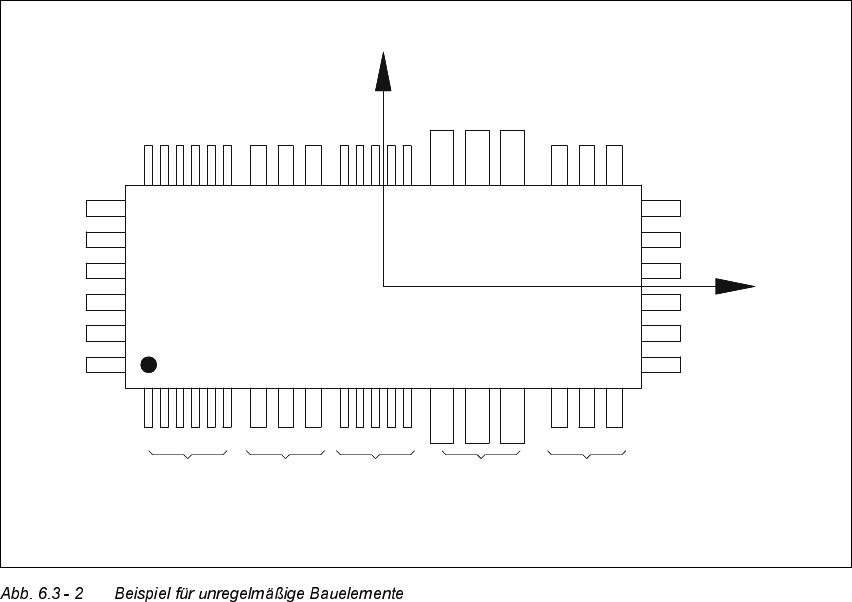
.ULWHULHQIUXQUHJHOPlLJH%DXHOHPHQWH
Definition
Ein Bauelement wird als unregelmäßig bezeichnet, wenn es nicht die Bedingungen für regel-
mässige Bauelemente erfüllt.
Zusätzliche Bedingungen für die Zentrierung mit dem BE-Visionsystem:
– In einer Reihe sind bis zu 3 verschiedene Beinmodelle erlaubt.
– In einer Reihe sind bis zu 15 Gruppen zulässig.
Y
X
Pin 1
1
1
6 Visionfunktionen Betriebsanleitung HS-50
6.3 BE-Visionsystem Software-Version 5.01 Ausgabe 01/99
208
7HLOXQJVDEZHLFKXQJ
Für jedes Bauelement kann im GF-Editor die Teilungsabweichung (das ist der Teilungsab-
stand von Beinchenmitte bis Beinchenmitte) gesondert eingegeben werden. Wird dieser Wert
überschritten, wird das Bauelement nicht zentriert und somit nicht bestückt.
*UHQ]ZHUWGHU4XDOLWlWVPHVVXQJ
Die Bauelemente dürfen die Grenzwerte der Qualitätsmessung nicht überschreiten, weil sie
dann nicht bestückt werden.
Grenzwerte sind:
– Differenz der Beinchenanzahl zwischen Original und Modell.
– Teilungsabweichung größer als der Wert in der GF-Datei.
– Größerer Orthogonalitätsfehler, als in der GF-Datei vorgegeben.
– Größere Abweichung der Außenmaße.
– Größere Abweichung des Mittelpunkts als die zulässige Lagetoleranz beim Abholen.
Modell 1
Gruppe 1
Modell 2
Gruppe 1
Modell 1
Gruppe 2
Modell 3
Gruppe 1
Modell 2
Gruppe 2
X
Pin 1
Y
X
Pin 1