TR7500_Series_Software_ch-v5-0-0.pdf - 第120页
Test Research Inc. 108 TRI 7500 Series User Gu ide – Software Model 1(Region Correlation) —此拼圖演算法是以 數 值運算方式,計算 FOV 間影像灰階差 異 最小處進 行 接和的運算。 Model 2(Pattern Search) —此拼圖演算法是以影像內容型態,以物件搜尋方 式進 行 找出 兩 影像間最相似的圖像…
Test Research Inc.
TRI7500SeriesUserGuide–Software 107
Enable Decoded Fail Retry Count—解碼失敗時重複測試的次數,系統預設關
閉此選項,若解碼失敗時將會進行無限次數的重測,直至測試成功或使用者自
行輸入條碼字串。若啟動設定,則系統重測達設定次數即退板。
Enable Specific Characters Filtering(0~9; A, B~ Z; a, b~z) —條碼字串字元特
殊符號濾除功能,若條碼字串中存在特殊符號字元將判定為解碼錯誤,系統預
設啟動此功能。
Save Decode Fail Image—儲存解碼失敗影像。解碼失敗影像會被存在
Project 目錄下\\FailBarcodeImg\\資料夾中。系統預設關閉此功能。
Board out to Entrance When Decode Fail—解碼失敗時退板自進板口處,需
配合 PLC-2.25 或更新的版本才有支援此功能,系統預設關閉此功能。
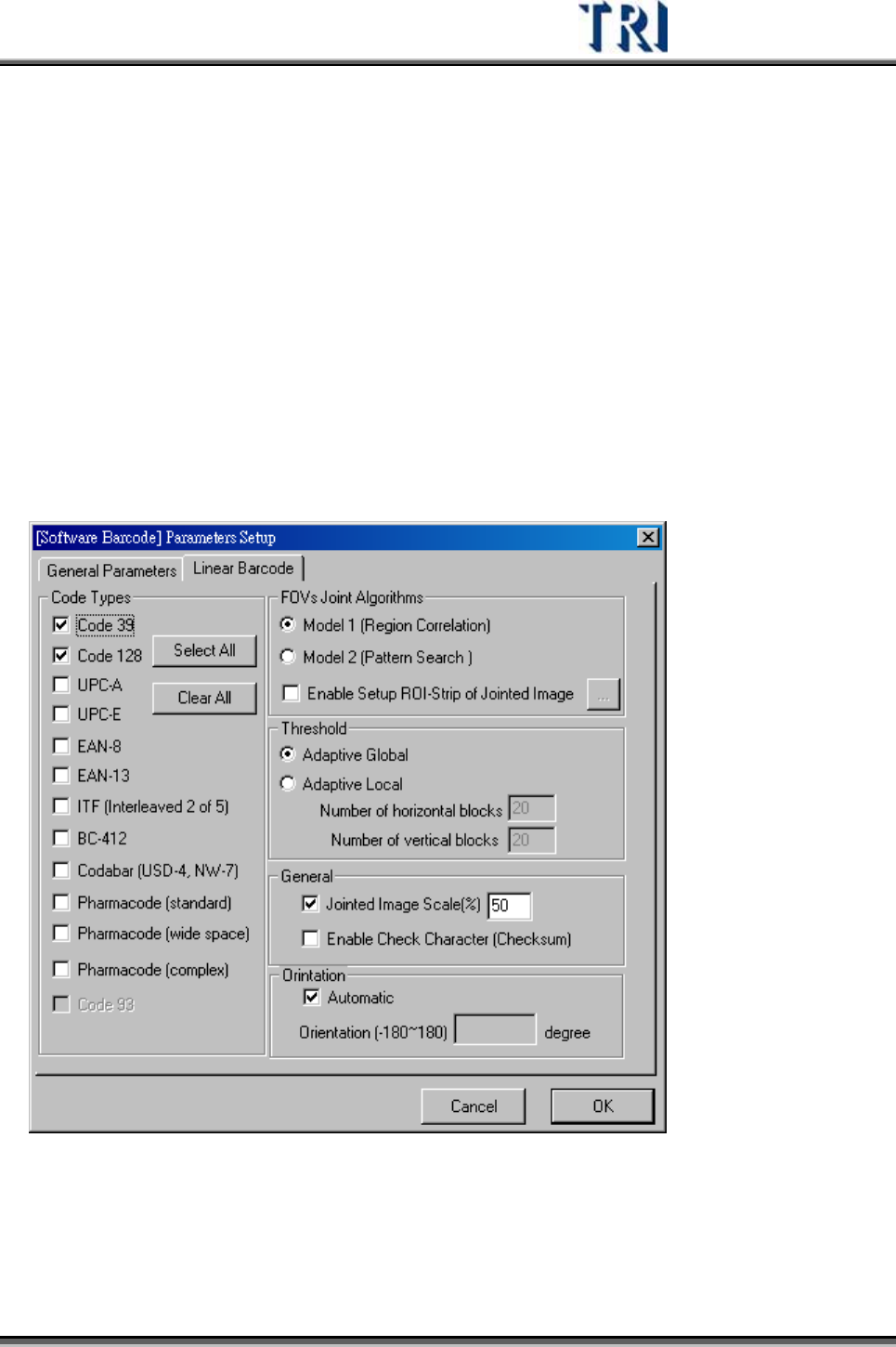
Linear Barcode—一維型態條碼參數
z Code Types—一維條碼的條碼型別。系統預設開啟 Code 39 與 Code128。若非
實際使用需要,請關閉不必要的條碼型別,設定過多的條碼型別會造成解碼錯誤
的機會並會增加解碼的時間。
z FOVs Joint Algorithms—拼圖演算法
Test Research Inc.
108 TRI7500SeriesUserGuide–Software
Model 1(Region Correlation) —此拼圖演算法是以數值運算方式,計算 FOV
間影像灰階差異最小處進行接和的運算。
Model 2(Pattern Search) —此拼圖演算法是以影像內容型態,以物件搜尋方
式進行找出兩影像間最相似的圖像進行拼圖。
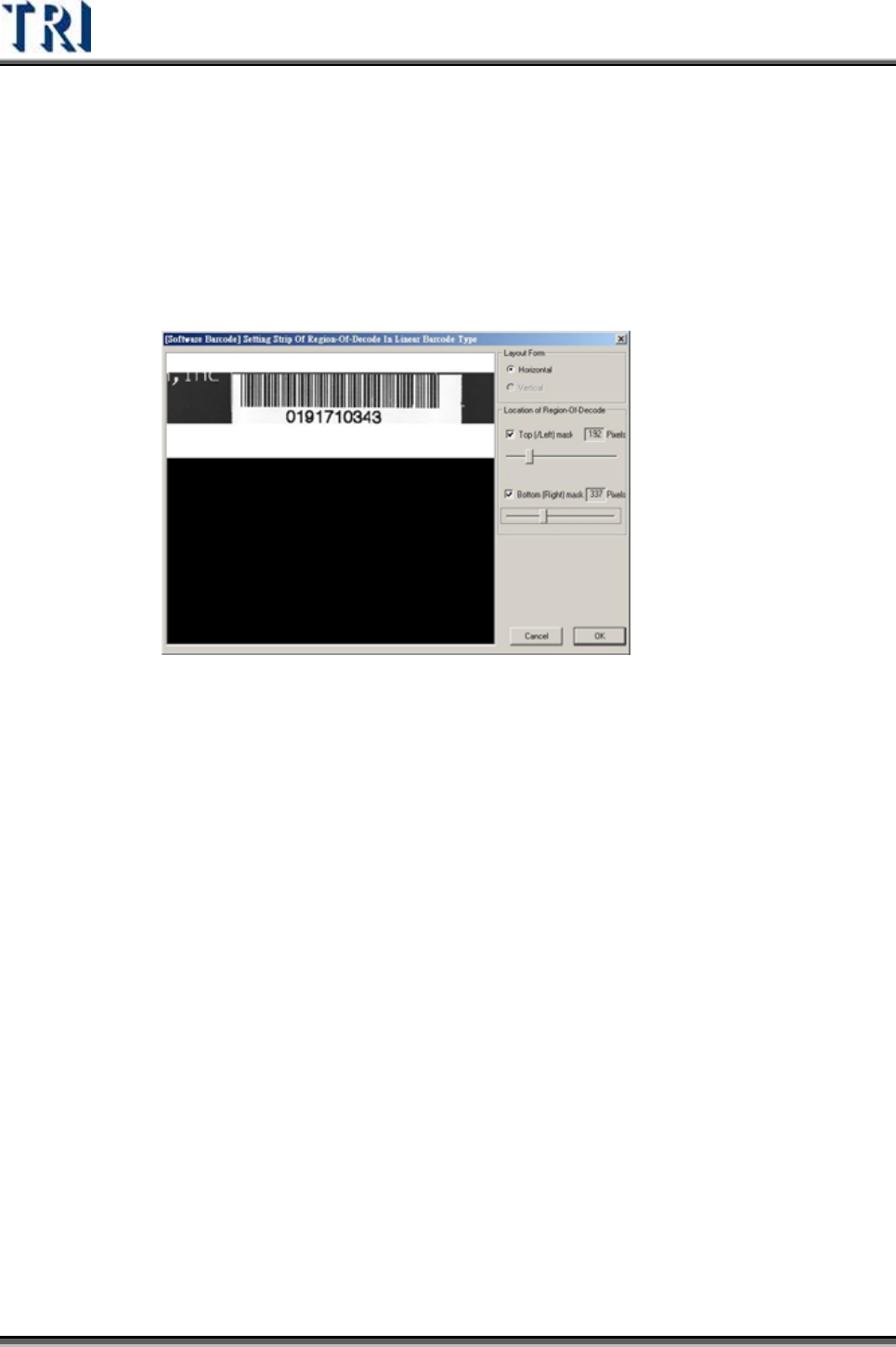
Enable Setup ROI-Strip of Jointed Image—設定拼圖影像條列屏蔽的功能。
啟動此功能可以屏蔽非條碼的部分,可避免不必要的錯誤並可以增加解碼的運
算速度,降低解碼所需的時間。影像條列屏蔽設定介面如下圖所示。
z Threshold—影像二值化演算法參數
Adaptive Global—全域的最適化(最佳化)閥值運算。系統預設值。
Adaptive Local—區域性的最適化(最佳化)閥值運算。
Number of horizontal blocks—區塊的水平方向大小(單位 Pixel)。
Number of vertical blocks—區塊的垂直方向大小(單位 Pixel)。
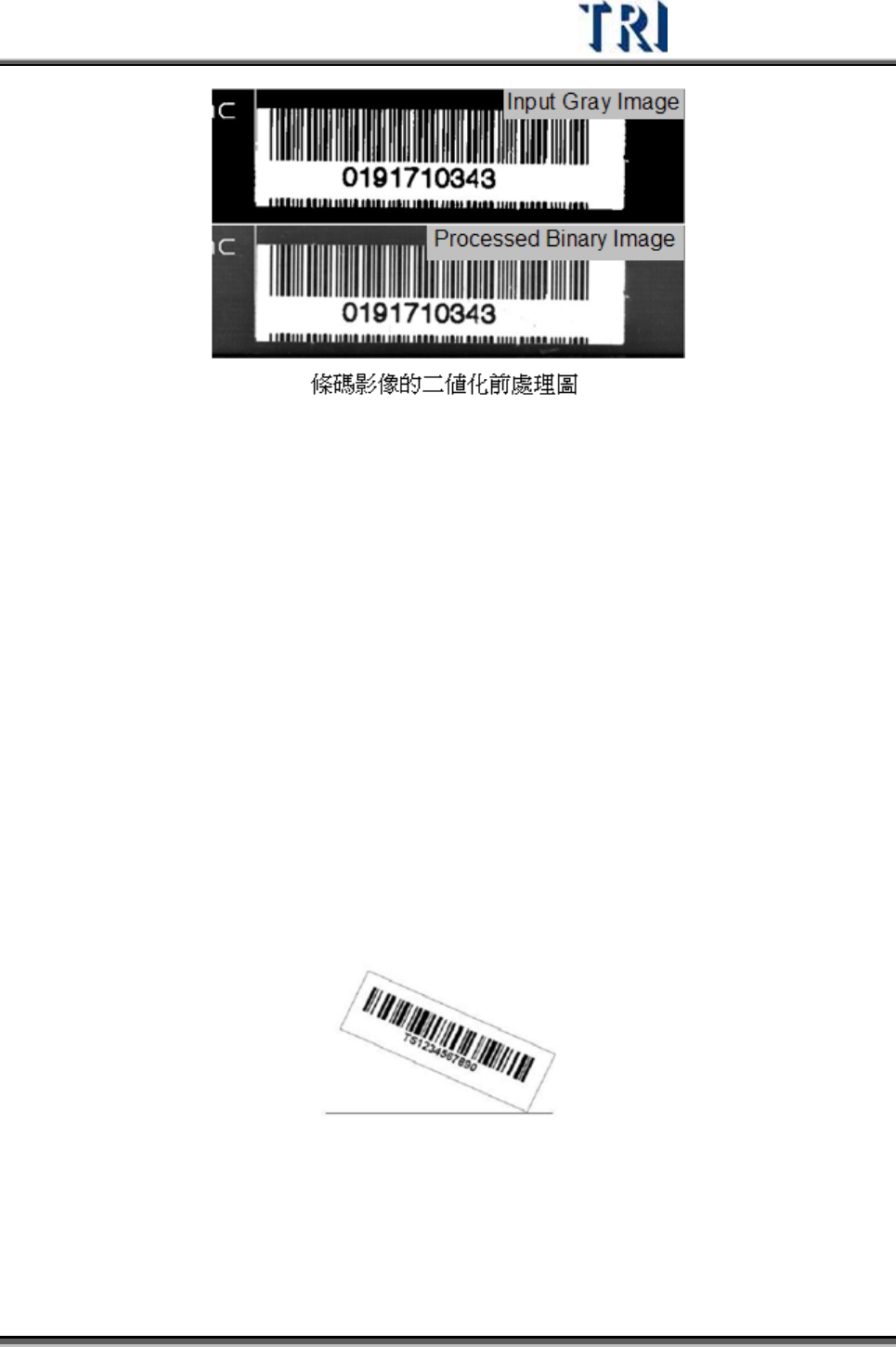
說明:
在此由條碼解碼的運算過程說明此參數意義。原始的條碼影像輸入後,需先
經由『二值化』的動作,將影像轉換成非黑即白的二值影像,如下圖所示,
之後再進行條碼的定位與條碼內文的解析。而此二值化的動作最重要的參數
即『閥值(Threshold)』。全域的最適化(Adaptive Global)閥值是整張影
像只會決定出一個閥值並依此閥值進行二值化動作,而區域性的最適化
(Adaptive Local)會依設定水平與垂直方向區塊大小進行區塊內個別區域的
二值化動作。
Test Research Inc.
TRI7500SeriesUserGuide–Software 109
z General—一般性參數
Jointed Image Scale(%)—合併影像的縮放(30%~150%),影像由拼圖演算
法將 FOVs 合併後,由於在某些運用狀況影像會過大,會造成解碼運算的負
擔,增加解碼運算時間。若啟動此參數可在進行解碼前將影像尺寸縮小,可降
低解碼運算負擔。但是,在某些運用中,縮的過小的影像會造成條碼本身影像
的資訊漏失,造成解碼失敗。設定的標準在於最細條碼的解析與對比度是否清
晰。對於高解析的條碼運用中,請關閉此參數。系統預設啟動此參數,預設
70% 。
Enable Check Characters (Checksum) —解析出的條碼內容值(字串內容)
的驗證檢測,依條碼的編碼原則,部分型態條碼(Barcode Types)擁有此編碼
原則,部分則否。此參數需視實際條碼編碼是否啟動驗證功能,以此對應來決
定解碼時是否開啟此功能。系統預設關閉此功能。
z Orintation—條碼在影像中的座落狀況呈現旋轉角度,如下圖所示。系統預設
『自動偵測』旋轉角度。
條碼於影像中座落旋轉角度
Data Matrix