HLC(Ver7.4)操作手册.pdf - 第56页
第 3 章 编辑程序 Rev03 3-20 2) Feed back (反馈选项) 执行优化后, 经过计算生产时间, 如工位之间的生产时间差超过允许范围时, 可 对数据进行再分配,使之控制在允许范围内。 选中此处,计算生产时间。 图 3-11-2-5 ● Max loop count (最大循环次数) :当工位之间的时间差超出允许范围时,可指定执 行数据再分配的次数。最多可设定循环计算 9 次。 ● T arget dif ferenc…
第 3 章 编辑程序 Rev03
3-19
3-11-2-2 设定优化条件
1)Assignments(分配选项)
● Components(同一元件的分配)
同一元件有多个送料器时,要指定是集中配置给一台工位,还是配置给多台工位。
◆ 集中到一台工位:将同一元件集中于一个工位。
◆ 配置至多台工位
:将同一元件配置给多台工位。
● Nozzle(使用的吸嘴)
选择是使用 MSL 设置时设定的吸嘴配置,还是使用优化的吸嘴配置。
◆全部自动配置:忽略 MSL 设置的常设吸嘴设定,设定为使用优化吸嘴
配置。此时,生产速度虽然会加快,但需要变更工位上的设定,需
要花费准备时间。因此,适于大批量生产时采用。
◆使用常设吸嘴,自动配置 ATC 空缺
:按 照 MSL 设置使用常设吸嘴,在资源
表的吸嘴数量设定比常设数量多的情况下,当 HLC 软件判断 AT C
(自动工具交换装置)吸嘴空缺时,将自动给 ATC 配置吸嘴。
◆ 使用常设吸嘴
:只使用 MSL 设置的常设吸嘴。因无需准备时间,适于多品
种小批量生产时采用。
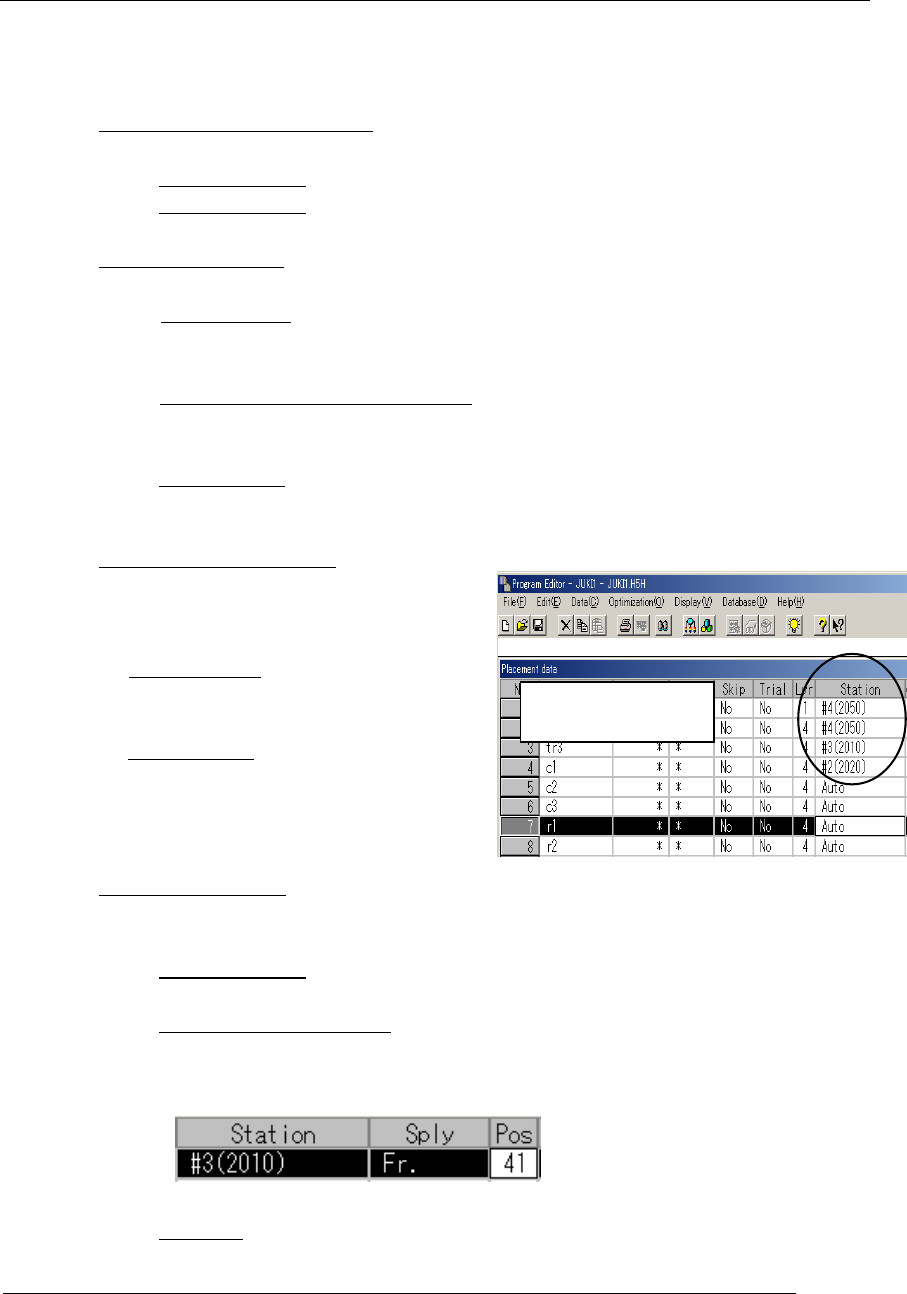
● Placement Data(贴片数据)
在「贴片数据」的“Station(工位)”
项目中已指定了工位时,需要选择是按指
定分配,还是忽略指定而执行优化。
◆分配自动选择:对指定配置的贴片点
按指定配置,只对“Auto(自动选择)” 贴
片点进行优化。
◆忽略工位指定
:忽略指定的工位,优化
所有的贴片点。
图 3-11-2-3
● Pick Data(吸取数据)
与上述“贴片数据”一样,如「吸取数据」的“Station(工位)”项目中已有
指定工位,应先选择按指定分配,还是忽略指定进行优化。
◆ 分配给自动选择
:已指定的送料器按指定配置,只对“Auto(自动选择)”
送料器配置进行优化。
◆ 把指定位置改为指定工位:忽略指定的供给号码,而仅设置指定“工位”
有效。
例:原指定“第 3 台 KE2010 前方 41 号”,改变设置后,“前方 41”被忽
略,只使“#3(KE2010)”有效。
图 3-11-2-4
◆ 全部分配:忽略所指定送料器配置,全部执行优化。
Assign several components to each stick feeder(将若干种元件归类,分配至同一个送料器):旧
杆式送料器(一个杆式送料器对应多个件杆)使用的元件,通常为一种元件分配一
个送料器。选中此选项,同型号的杆式元件,通过检查后归入同一送料器。
选择指定工位有效还
是无效。
第 3 章 编辑程序 Rev03
3-20
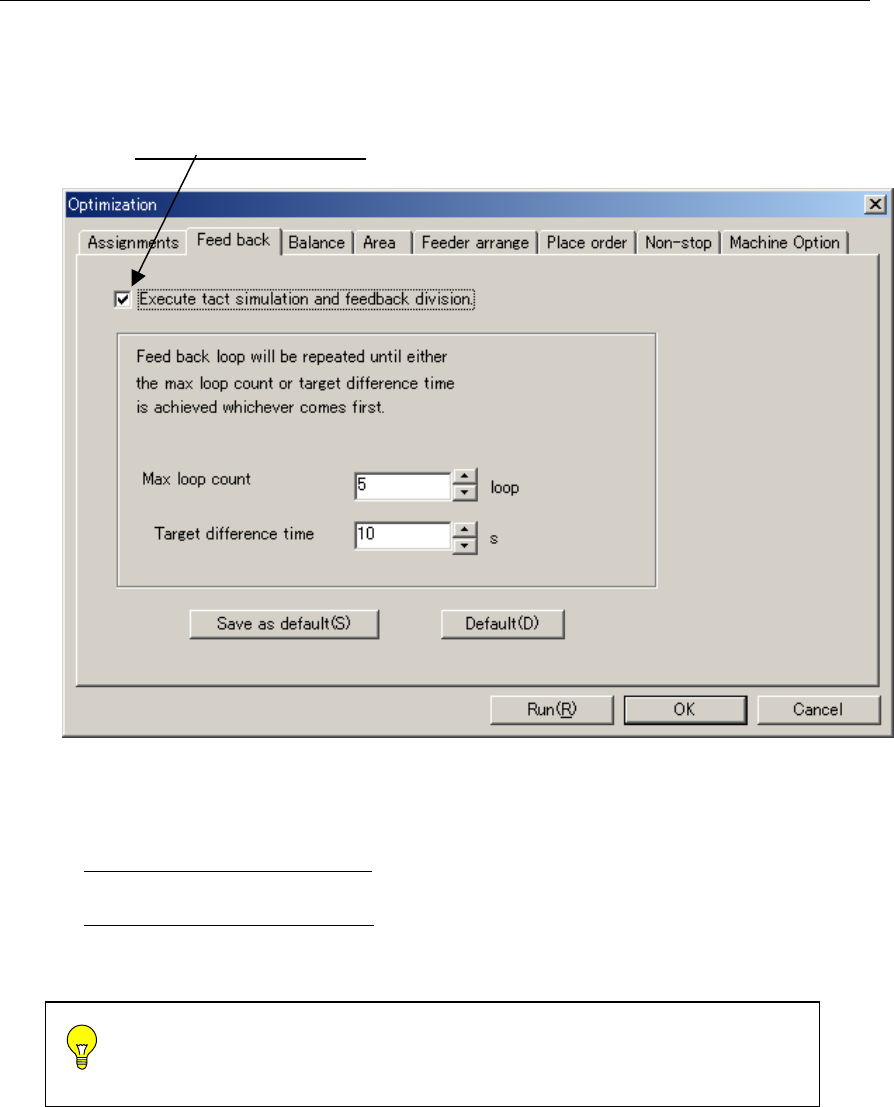
2)Feed back(反馈选项)
执行优化后,经过计算生产时间,如工位之间的生产时间差超过允许范围时,可
对数据进行再分配,使之控制在允许范围内。
选中此处,计算生产时间。
图 3-11-2-5
●Max loop count(最大循环次数)
:当工位之间的时间差超出允许范围时,可指定执
行数据再分配的次数。最多可设定循环计算 9 次。
●Target difference time(允许时间)
:设定工位之间的时间差允许时间,最多可设定 59
秒。
为了得到最佳结果,循环计算最多可设定 9 次,时间差允许时间为“0”。
根据设定,以 10 次为限进行循环计算,要求各工位时间差达到“0”。
如计算 10 次结果都达不到“0”时,应采用 10 次计算中最短的时间差值。
第 3 章 编辑程序 Rev03
3-21
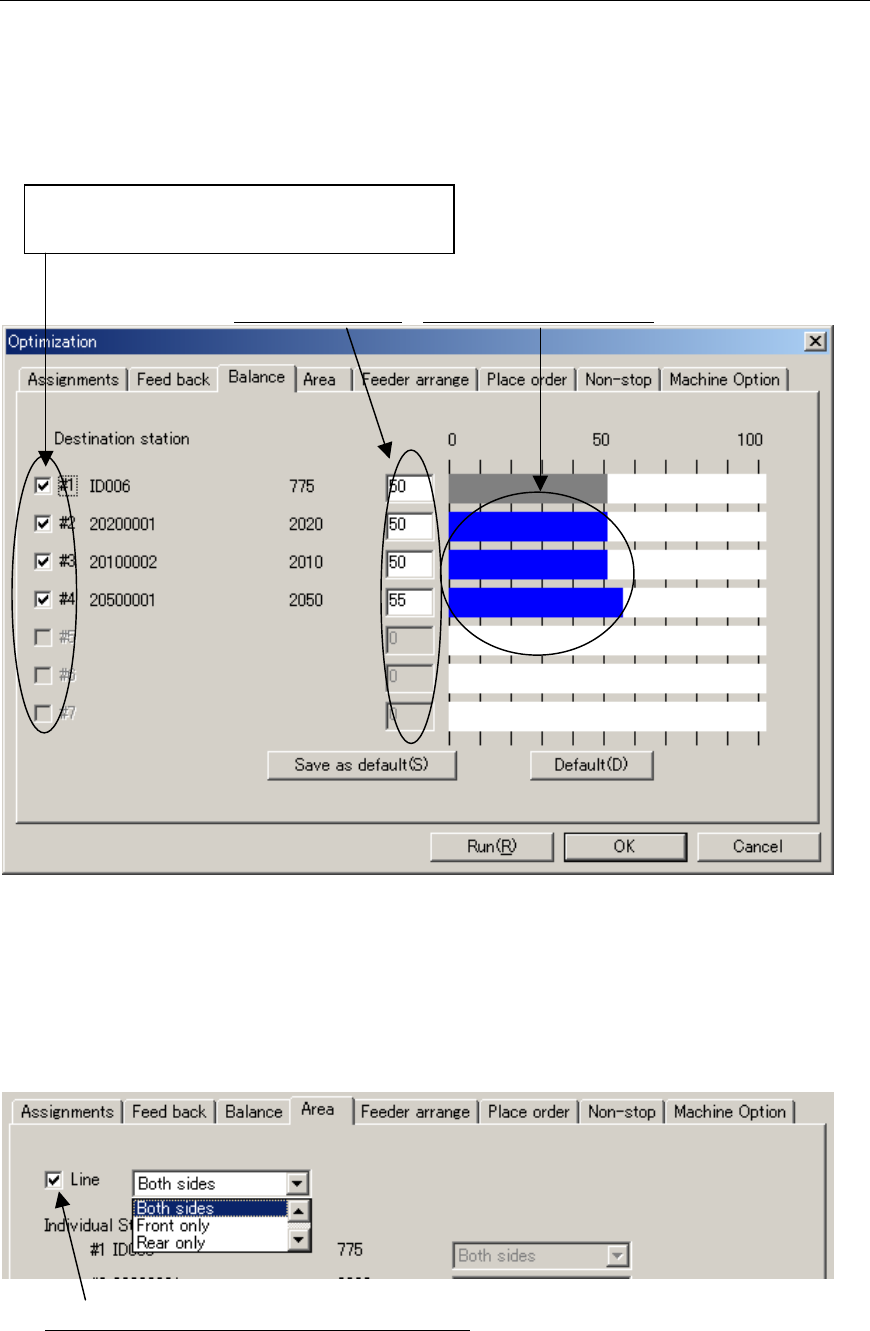
3)Balance(平衡选项)
设定各工位之间保持一致的生产节奏。
以 KE2050 和 KE2060 构成的生产线为例,假若 KE2050 和 KE2060 生产 1 件产品各需
要 50 秒。而 KE2060 准备 1 个托盘元件还需 10 秒钟时间。在这种情况下,效率最高的
优化为: 把 KE2050 生产每件产品设定为 55 秒,KE2060 生产每件 45 秒。
在此处用键盘输入,或用鼠标移动此条来设定。
图 3-11-2-6
● 上述数值为工位之间的比率。
因此 KE2050:KE2060 设定为 50:50 与 70:70 时,比值相同。
● 胶贴剂点胶机和元件实装机用不同颜色显示(灰与蓝),需要分别操作。
4)Area(区域选项)
指定送料器的配置区域。
可将所有送料器配置在工位的前方或后方。
图 3-11-2-7
不选中 Line(生产线)时,可逐个设定各工位。
没选中的是不使用的工位。
生产时不使用的工位,应设定为“空运行模式
”。