WinMCS_Manual(ENG) rev1.0.pdf - 第32页
32 WinMCS_Manua l(ENG) rev 1.0 Koh Y oung T echnology Inc. 4.3. VELOCITY & PID SETTING This is to set the v alues wi th regard to m otio n control of axes such as velocity , PID gain va l ue, and etc. The values in t…
31
Service Manual
Koh Young Technology Inc.
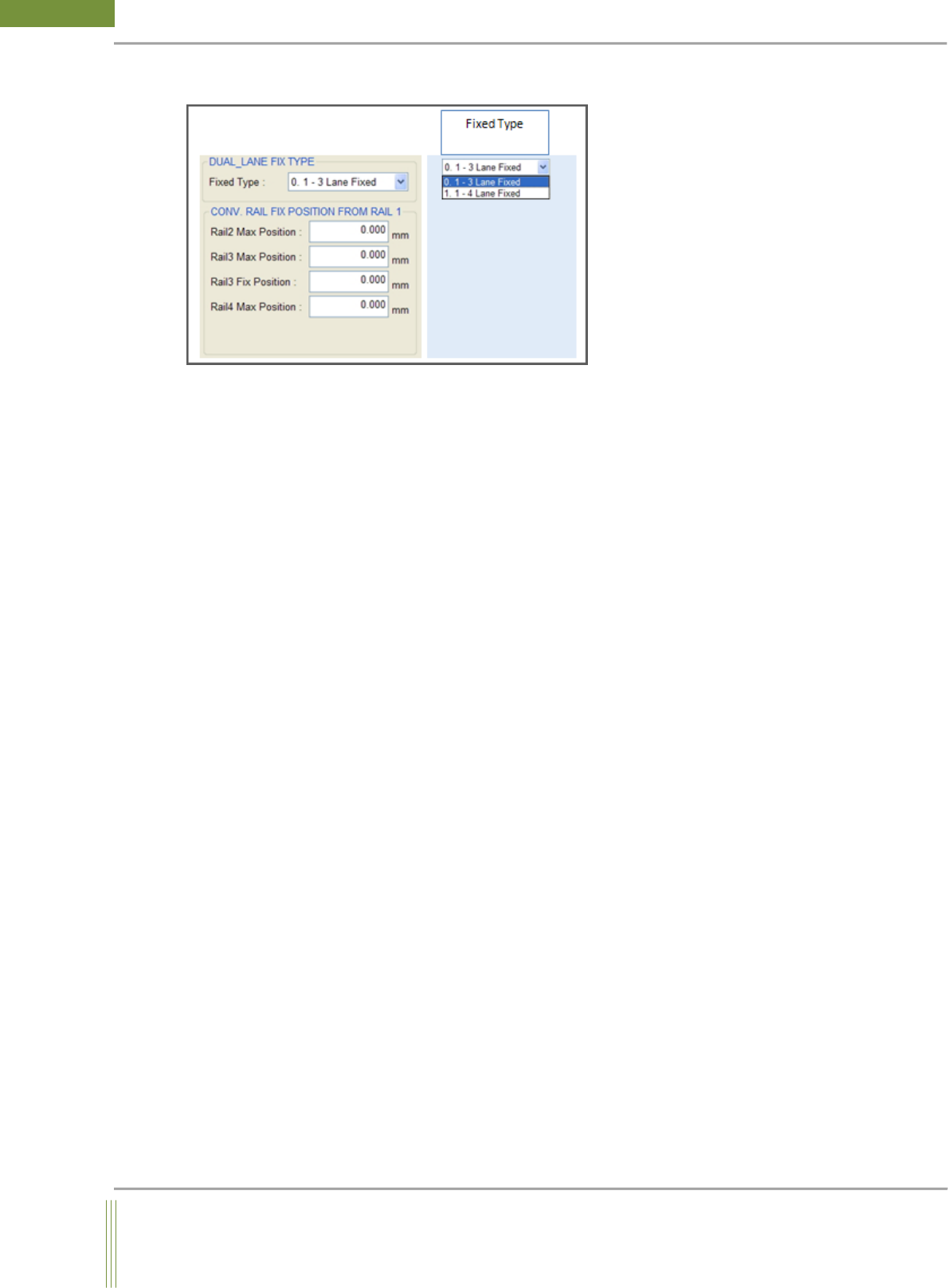
DUAL LANE FIX TYPE & CONV. RAIL FIX POSITION
1. Fixed Type: It is to set the fixed rail of conveyor. (Dual Lane Option)
0. 1-3 Lane Fixed: No. 1 and No. 3 Lanes are fixed.
1. 1-4 Lane Fixed: No. 1 and No. 4 Lanes are fixed.
2. Fix Position, Max Position: This is to set the fixed position and maximum position of each
lane.
32
WinMCS_Manual(ENG) rev1.0
Koh Young Technology Inc.
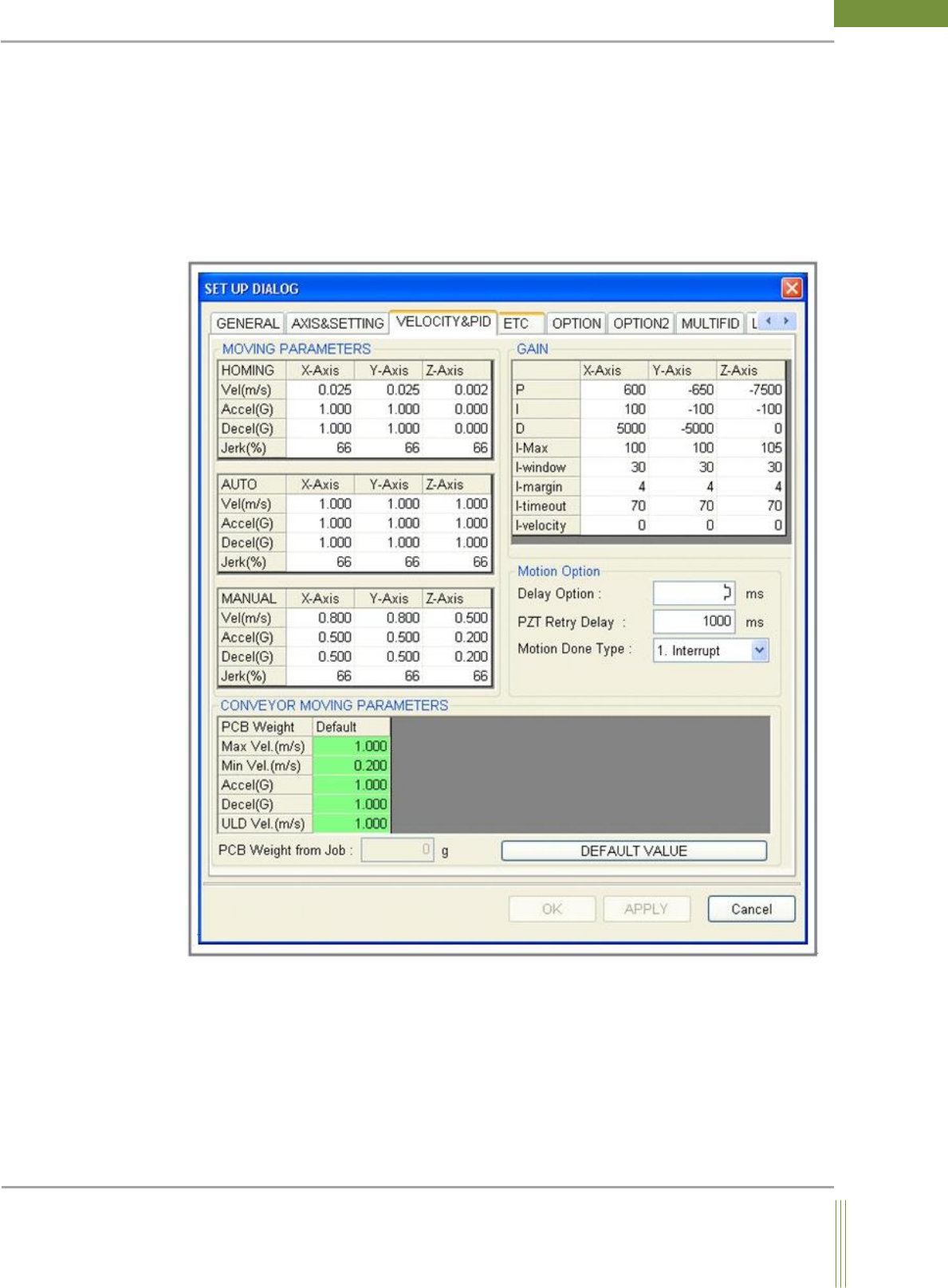
4.3. VELOCITY & PID SETTING
This is to set the values with regard to motion control of axes such as velocity, PID gain
value, and etc. The values in this tab shouldn’t be changed until it is allowed by an
authorized person (Factory Setting)
Location: Menu Settings SystemSettings Velocity & PID
4.3.1. VELOCITY & PID SETTING
33
Service Manual
Koh Young Technology Inc.
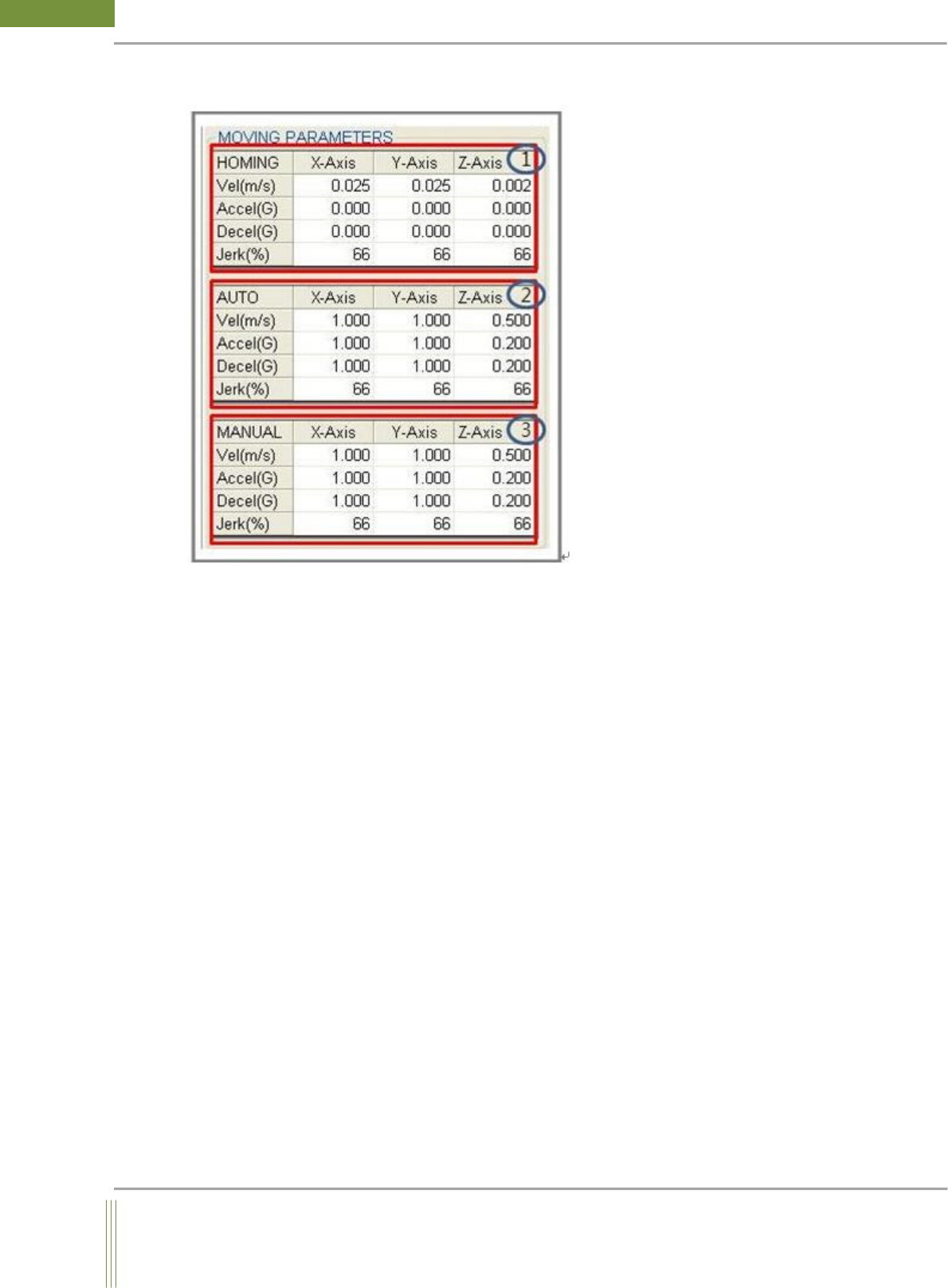
MOVING PARAMETER
1. HOMING:
Velocity, acceleration and deceleration when X, Y, Z axis is homing after executing WinMCS.
2. AUTO:
These are velocity, acceleration and deceleration of motion during the machine inspection.
3. MANUAL:
These are velocity, acceleration and deceleration when the motion is acting in manual
motion.