WinMCS_Manual(ENG) rev1.0.pdf - 第35页
35 Service Manual Koh Y oung T echnology Inc. Motion O p tion 1. Delay Option It moves after the real Mo tion Done after this del ay time. ( Default: 0 ms) 2. PZT Retry Delay When it moves to the fail ed FOV , inspect …
34
WinMCS_Manual(ENG) rev1.0
Koh Young Technology Inc.
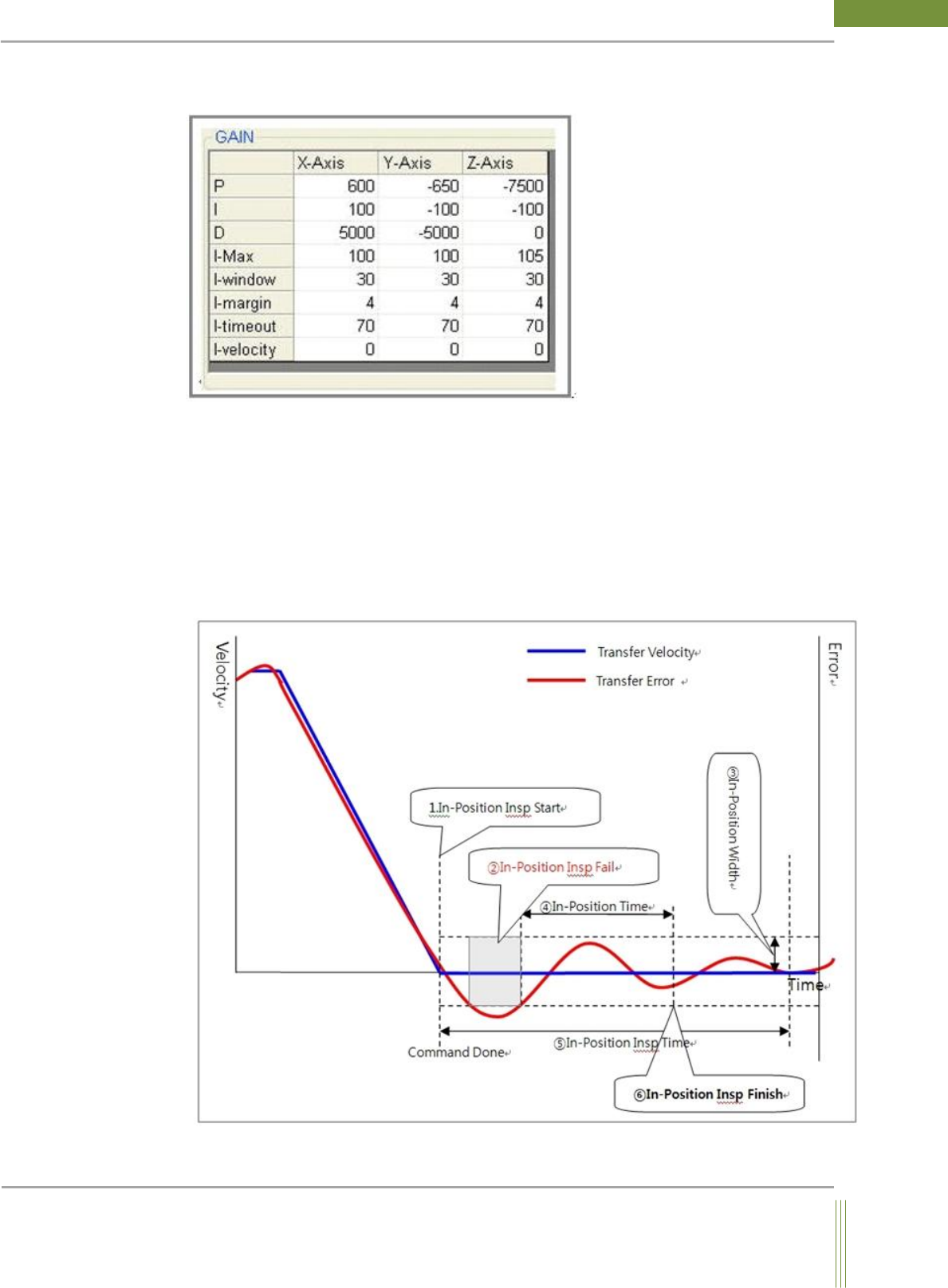
GAIN .
1. VELOCITY&PID
This is to set the values with regard to motion control of axes such as velocity, PID gain
value, and etc. The values in this tab shouldn’t be changed until it is allowed by an
authorized person.
2. Margin & Window & Time out
The below picture shows a real motion movement graph by input command in PID. To
check out that a motion is taken properly, the scanning starts from the moment of motion
done to the time out period within the margin and the window size area. If the motion is
not in the limit of MAX/MIN pulse, time our error will be occurred.
35
Service Manual
Koh Young Technology Inc.
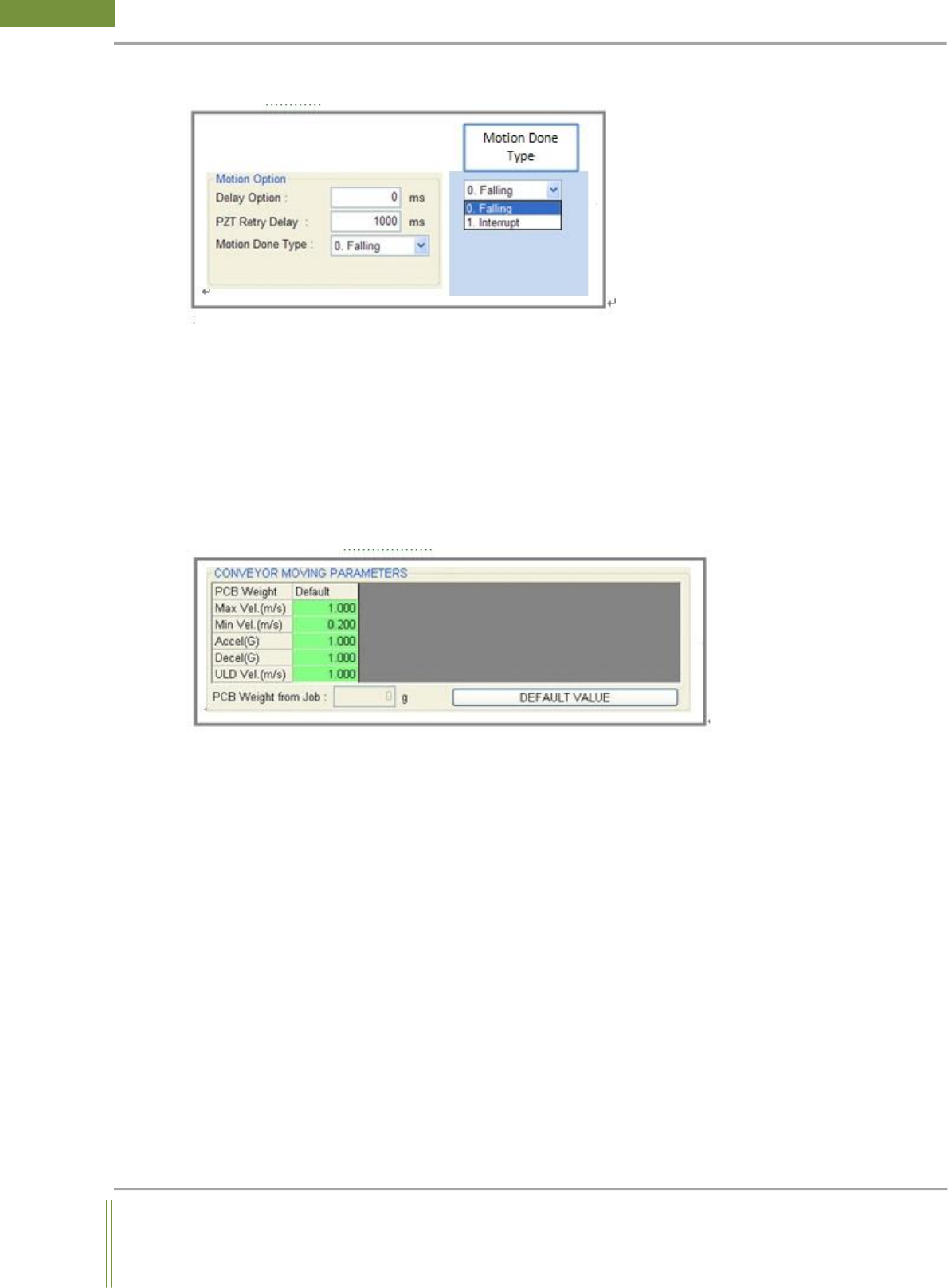
Motion Option
1. Delay Option
It moves after the real Motion Done after this delay time. (Default: 0 ms)
2. PZT Retry Delay
When it moves to the failed FOV, inspect again after this delay time.
3. Motion Done Type
0. Falling: Motion Done Signal is checked at MCS.
1. Interrupt: Motion Done Signal is checked at Motion Board.
Conveyor Moving Parameter (Available from STMC Firmware)
1. Max Vel ( m/s )
Set Max conveyor belt speed
2. Min Vel ( m/s )
Set Min conveyor belt speed
3. Accel ( G )
Set the conveyor acceleration
4. Dccel ( G )
Set the conveyor deceleration
5. ULD Vel ( m/s )
Set the conveyor unloading belt speed
36
WinMCS_Manual(ENG) rev1.0
Koh Young Technology Inc.
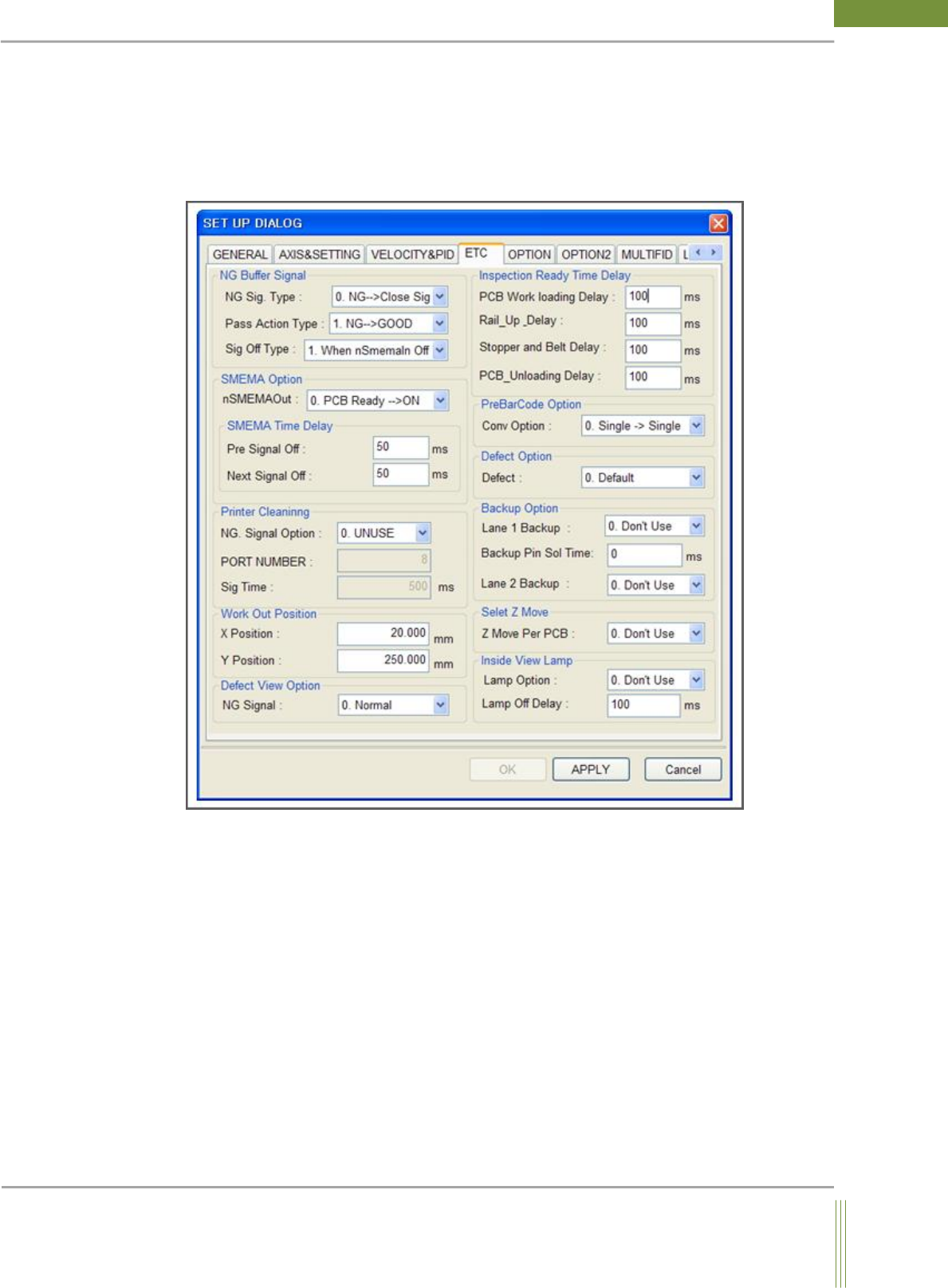
4.4. ETC SETTING
It is setting for the various exceptional cases.
Location: Menu Settings SystemSettings ETC
4.4.1. ETC SETTING