CP-7系列机械手册.pdf - 第166页
第 4 部 第 1 章 站的各部 Edition 2. 0 4-1-1 1 CP-733E/7 43ME/743E 机械手册 1.4.2 1.4.2 1.4.2 1.4.2 吸嘴高度的确认 吸嘴高度的确认 吸嘴高度的确认 吸嘴高度的确认 吸嘴下降到吸取供料器 上的元件的高度。 请确认通 过机械阀的动作产 生吸力后, 吸嘴能够 吸 取元件。 1. 将拆去了料带导盖的 W8 × P4mm 纸带供料器放到 No.1 料站。 2. 顺序按下:单…
第 1 章 站的各部 第 4 部
CP-733E/743ME/743E 机械手册 4-1-10 Edition 2.0
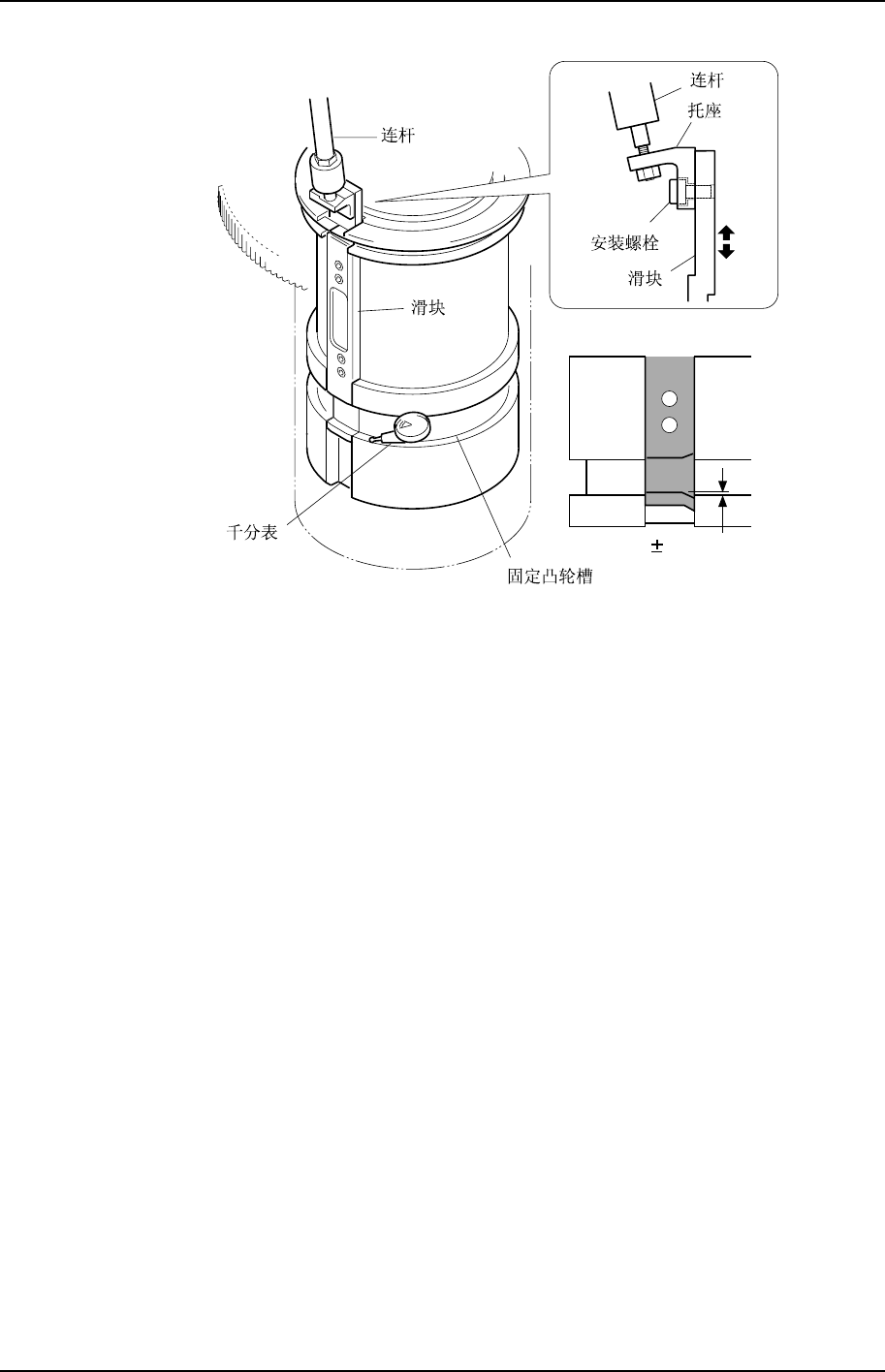
0.03mm
C7SM4013S
4. 将拆下的部位移动到 1st,将 1st 上下的电磁阀设置为 ON,凸轮杆开始动作。
5. 在凸轮角度对准0度时,如上图所示放置千分表。
6. 确认滑块的凸轮槽与固定凸轮槽的平行度为0~0.02mm。超过0~0.02mm 的范围
时, 拧松连杆与托座间的安装螺栓,调节滑块的高度,使其进入范围内。
7. 保持滑块的高度,拧紧安装螺栓。
8. 再次确认滑块的凸轮槽与固定凸轮槽的平行度。
备注
备注备注
备注)
))
) 调整后仍然超出0~
调整后仍然超出0~调整后仍然超出0~
调整后仍然超出0~0.02mm
0.02mm0.02mm
0.02mm 的范围时,必须再次进行吸件吸嘴上下动作单元的全体调
的范围时,必须再次进行吸件吸嘴上下动作单元的全体调的范围时,必须再次进行吸件吸嘴上下动作单元的全体调
的范围时,必须再次进行吸件吸嘴上下动作单元的全体调
整。
整。整。
整。
9. 将吸嘴轴 Assy 重新安装到拆下的位置。使用附属的离合器定位治具,按与拆下时相
反的顺序进行。
第 4 部 第 1 章 站的各部
Edition 2.0 4-1-11 CP-733E/743ME/743E 机械手册
1.4.2
1.4.21.4.2
1.4.2 吸嘴高度的确认
吸嘴高度的确认吸嘴高度的确认
吸嘴高度的确认
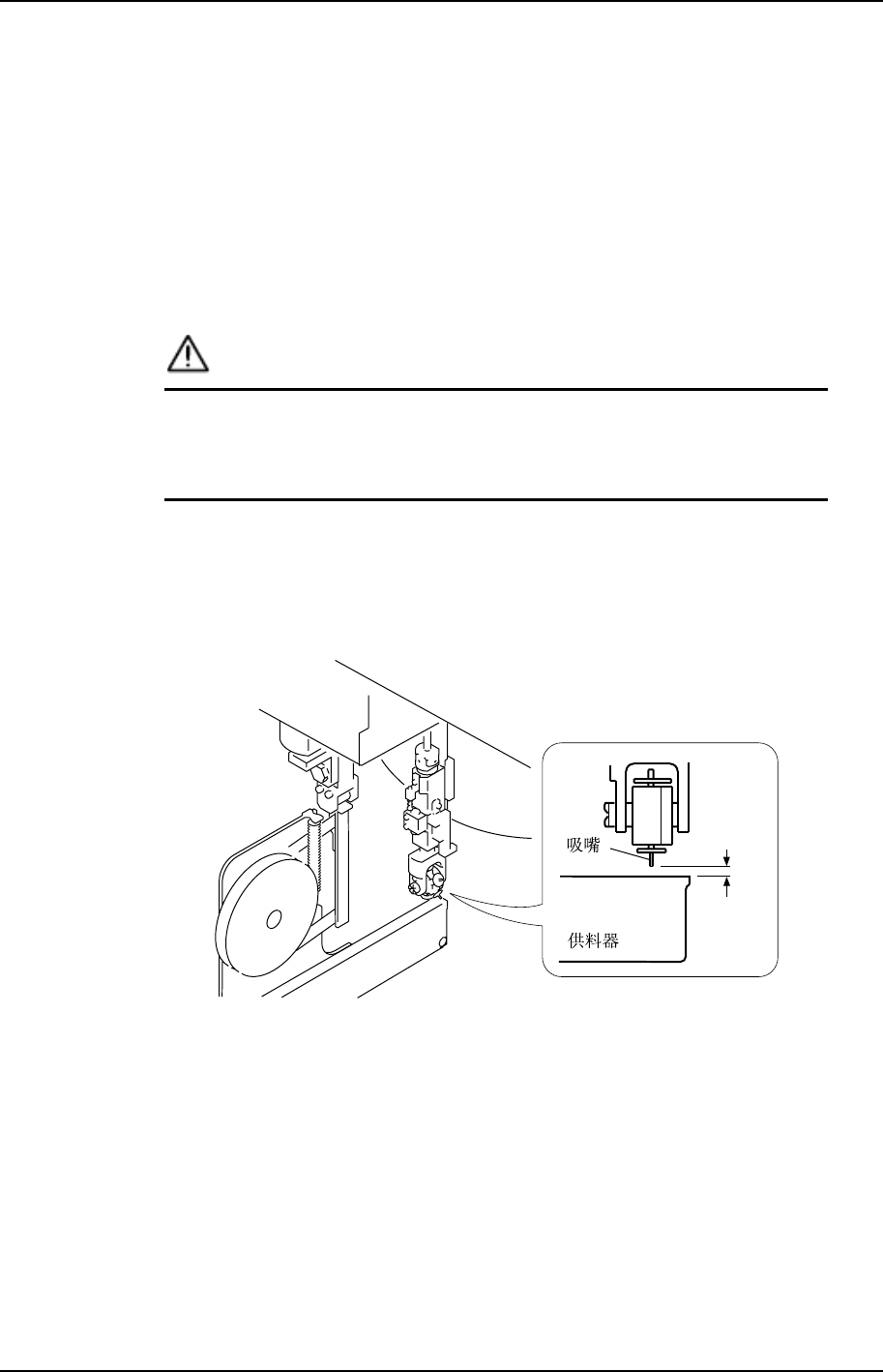
吸嘴下降到吸取供料器上的元件的高度。请确认通过机械阀的动作产生吸力后,吸嘴能够吸
取元件。
1. 将拆去了料带导盖的 W8×P4mm 纸带供料器放到 No.1 料站。
2. 顺序按下:单动→D1D2-轴→1(输入)→OK→START, 将送料器移动到 1st。
3. 确认 NZ 轴在固有值 PICK UP POS.NZ 的设定值处停止。如果不是这样的话,通过
微动操作将其调整到 NZ 轴设定位置。
警
警警
警
告
告告
告
凸轮轴在初始位置
凸轮轴在初始位置凸轮轴在初始位置
凸轮轴在初始位置(0
(0(0
(0 度
度度
度)
))
)以外的情况下,因弹簧弹力的作用,会发生回
以外的情况下,因弹簧弹力的作用,会发生回以外的情况下,因弹簧弹力的作用,会发生回
以外的情况下,因弹簧弹力的作用,会发生回
转。
转。转。
转。
在机器内部作业时,请充分注意安全。
在机器内部作业时,请充分注意安全。在机器内部作业时,请充分注意安全。
在机器内部作业时,请充分注意安全。
4. 在凸轮角度为 0 度时,将 1st 的电磁阀设置为 ON,使凸轮杆开始动作。
5. 请边看凸轮刻度盘边进行微动操作,将凸轮角度转到 170 度。
6. 使用厚薄规,确认吸嘴头与供料器表面的距离(吸着高度)为 0.65mm。
0.65 mm
C7SM4014S
第 1 章 站的各部 第 4 部
CP-733E/743ME/743E 机械手册 4-1-12 Edition 2.0
1.4.3
1.4.31.4.3
1.4.3 吸嘴上升端传感器的调整
吸嘴上升端传感器的调整吸嘴上升端传感器的调整
吸嘴上升端传感器的调整
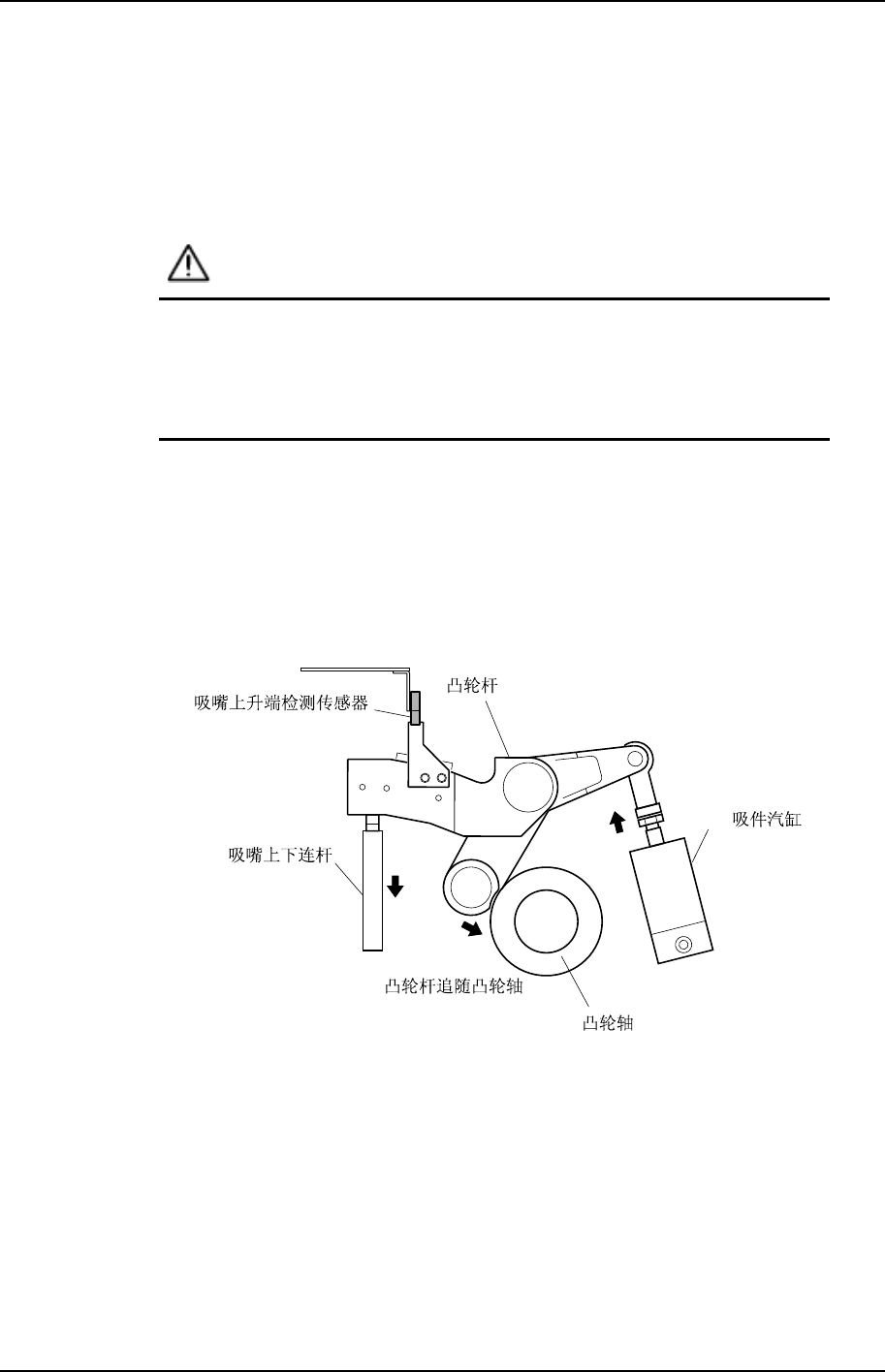
检测 1st 吸嘴上下连杆的上升端的传感器装置在凸轮箱内。在吸嘴为上升端时,调整传感器
位置,使之为 ON。
1. 按下[紧急停止]按钮,切断 200V 电源,使用 100V。
警
警警
警
告
告告
告
作业前必须要切断
作业前必须要切断作业前必须要切断
作业前必须要切断 200V
200V200V
200V 电源
电源电源
电源。
。。
。
凸轮轴在初始位置
凸轮轴在初始位置凸轮轴在初始位置
凸轮轴在初始位置(0
(0(0
(0 度
度度
度)
))
)以外的情况下,因为弹簧弹力的作用,会发生
以外的情况下,因为弹簧弹力的作用,会发生以外的情况下,因为弹簧弹力的作用,会发生
以外的情况下,因为弹簧弹力的作用,会发生
回转。
回转。回转。
回转。
在机器内部作业时,请充分注意安全。
在机器内部作业时,请充分注意安全。在机器内部作业时,请充分注意安全。
在机器内部作业时,请充分注意安全。
2. 将凸轮轴设置为 0 度。
3. 将凸轮箱内的 1st 吸件汽缸的制动轴变为伸出状态。
用 I/O 操作,顺序选择: 功能选项→I/O 检查→标准 I/O→Y031 ST1 PICKUP
SOL ENGAGED→输出信号 ON。
通过此操作使凸轮杆成为追随凸轮轴状态。
1st
C7SM4015S