SM411F_Service Manual.pdf - 第135页
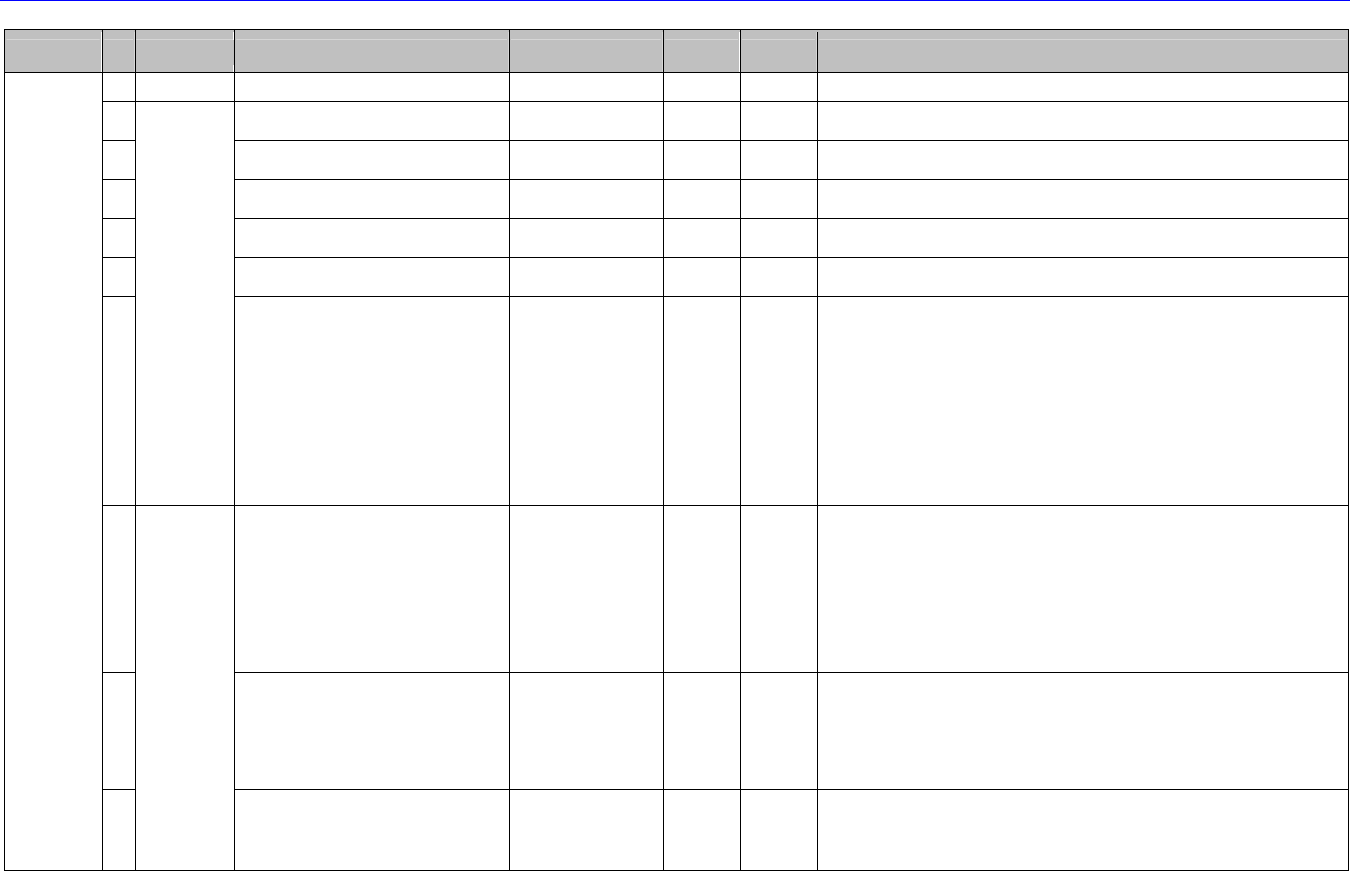
Softwar e Module No Constant Name Classification Va l u e Unit Description 34 SUPPORT_MOUNT_OP TI Use 1 Determine whether to use t he placement option through which the part is placed in a different order . (Pick , Align…
Software
Module
No
Constant Name Classification
Value
Unit Description
71
OPT_HRS_VISION Use 0 Const 0: The HRS function is not used, 1: Use the HRS function.
62
SYS_FLY_OUTER_LEVEL Use 0 Const Set the control algorithm of the outer illumination for the fly-camera.
68
SMALL_COMP_METHOD Use 15 Const Method related to the small component.
70
SMALL_COMP_SIZE Use 650 um The reference size of the small component.
72
VERY_SMALL_COMP_METHOD Use 7 Const Method related to the very small component.
73
VERY_SMALL_COMP_SIZE Use 400 um The reference size of the very small component.
94
Factory
FLY_INSPR_METHOD Use 3 Const
0: The fly camera performs recognition after rotation (recognition by
placement angle).
1: The fly camera rotates after recognition (recognition of 0 degrees).
2: The fly camera rotates after recognition. However, it performs
recognition after rotation at the feeding angle of 45 degrees and during
fine grabbing.
3: The fly camera rotates after recognition. However, it performs
recognition after rotation at the feeding angle of 45 degrees and during
fine grabbing and fine pitch feeding.
28
MOUNT_POS_CHECK_METHOD Use 0
The function that checks the position of the place stopper before
placement.
0: No check.
1: The placement stopper is at the right of the front side.
2: The placement stopper is at the left of the front side.
3: The placement stopper is at the right of the rear side.
4: The placement stopper is at the left of the rear side.
30
SUPPORT_GRAB_AND_MO
VE
Use 1
Determine whether to use the method that grabs the part
and immediately starts moving it when using the fix-
camera.
0: Move after recognition.
1: Move after GRAB.
33
Debug
SUPPORT_FIX_SYNC_GRA
B
Use 1
Determine whether to use the simultaneous grabbing
method by using 2 fix cameras.
0: No simultaneous grabbing, 1: Simultaneous grabbing
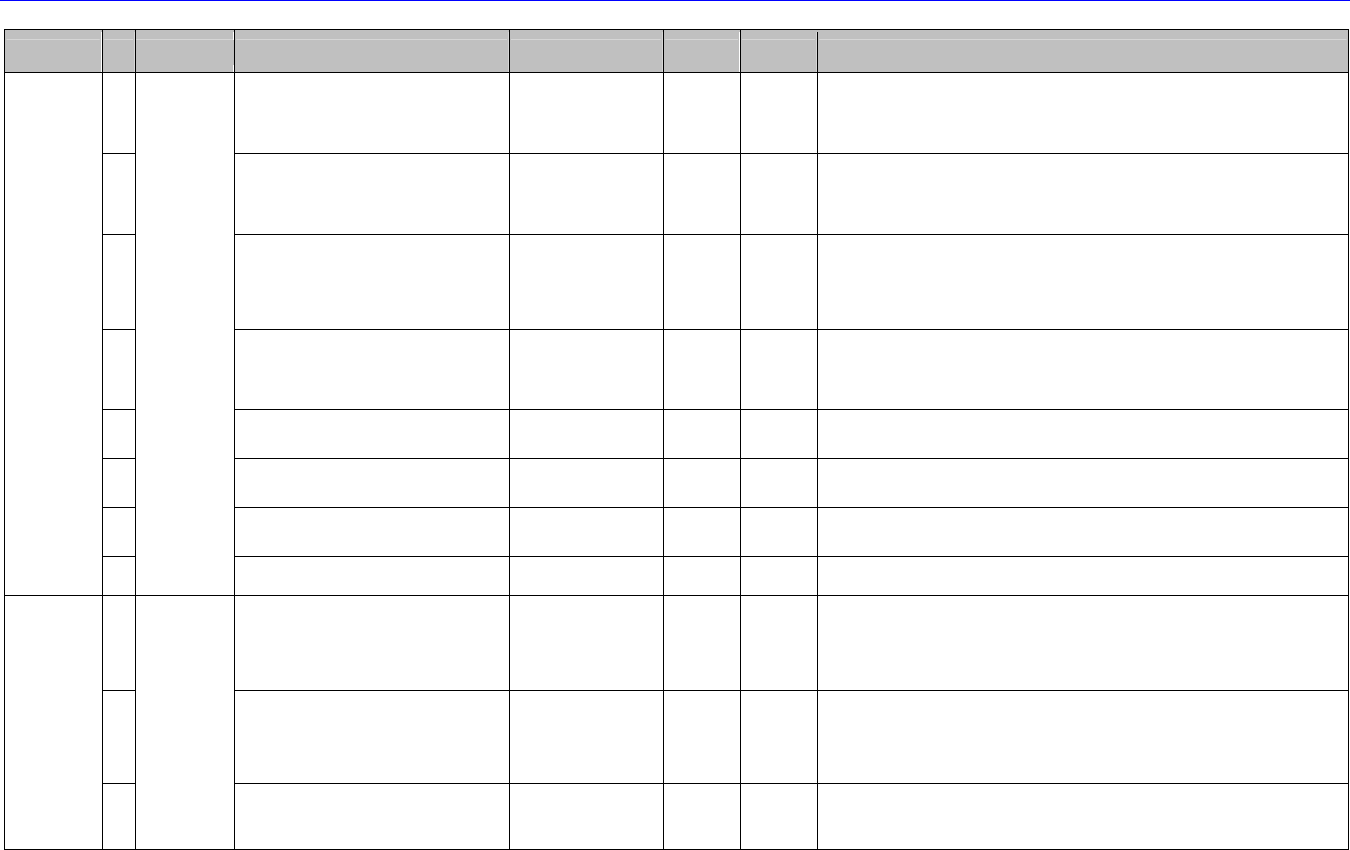
Software
Module
No
Constant Name Classification
Value
Unit Description
34
SUPPORT_MOUNT_OPTI Use 1
Determine whether to use the placement option through which
the part is placed in a different order. (Pick , Align, Mount…)
0: Not used. 1: Use.
35
METHOD_MOUNT_OPTI Use 4
The option for the method to set the placement order.
51
USE_FLY_AUTOTEACH_RA
NGE
Use 0 0, 1
1: Use the value of FLY_AUTOTEACH_RANGE (#52) as
the recognition range when performing automatic teaching
(applicable only for fly camera).
0: Perform recognition on the entire screen.
52
FLY_AUTOTEACH_RANGE Use 0 um
Refer to No.51
60
SUPPORT_SMART_PROFIL
E
Use 95 const Supports smart profile algorism.
62
FLY_CONST_TIME Use 25 msec
Time to last the constant speed(XY speed) during
recognition by the fly camera.
63
FLY_DECSTART_TIME Use 90 msec
Time which the speed(XY speed) begin to be reduced
during recognition by the fly camera.
69
SUPPORT_SMART_SEQ Use 1 Const Supports the smart seq algorism.
16
READY_RELAY_DELAY Reserved 800 msec
The time delay from the time the Ready Relay is turned on
until it is checked.
0: Apply default value (approximately 150msec).
Others: According to the set value
17
USE_UPS Use 0 Const
0: UPS is not used.
1: Use the UPS.
H/W
18
Factory
CE_TYPE Use 0 Const
0: Not applied (the CE type).
1: Applied (the CE type)
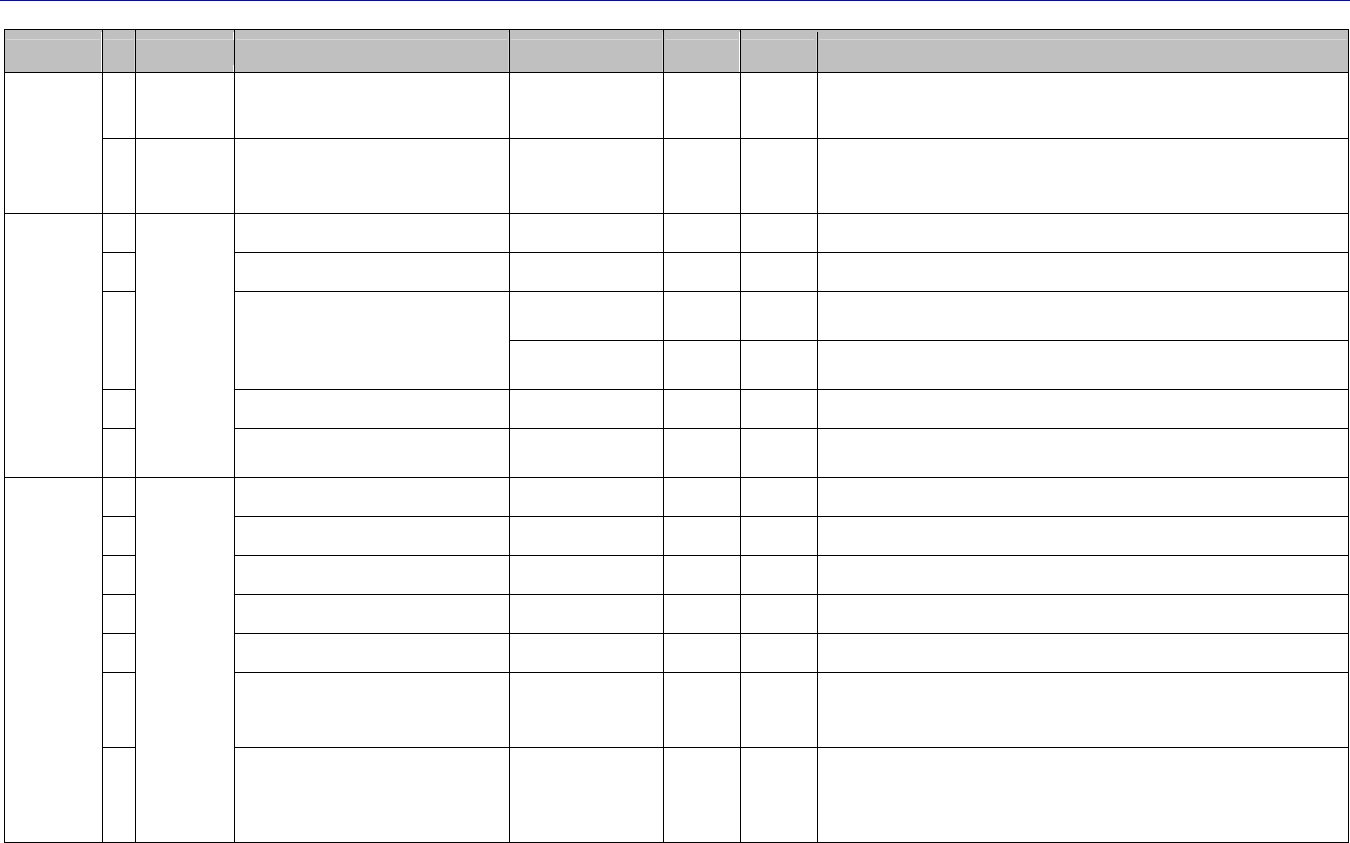
Software
Module
No
Constant Name Classification
Value
Unit Description
98
IGNORE_BUTDOWN_SENS
OR
Reserved 1 Const
0: There is BUT Down sensor.
0: There is not BUT Down sensor.
49
Debug
HEAD_LIGHT_BOARD_TYP
E
0 0 , 1
0: Illumination board for the head for mass production.
1: Old illumination board
40
SYS_DELAY_XY1 Use 20 msec The delay that is used for general XY movement.
41
SYS_DELAY_XY2 Use 20 msec The delay that is used for XY movement for part pickup.
8 msec
The delay that is used for XY movement of placing the part
(Polling).
42
SYS_DELAY_XY3
Use 2 msec
The delay that is used for XY movement of placing the part
(Polling).
43
SYS_DELAY_XY4 Use 40 msec The delay that is used for high precision XY movement.
XY Move
44
Factory
SYS_BACKLASH_XY Use 5 um
The zone that is used in the XY backlash prevention
algorithm.
45
SYS_DELAY_Z1 Use 0 msec The delay that is used for general Z-axis movement.
46
SYS_DELAY_Z2 Reserved 0 msec -
47
SYS_DELAY_Z3 Reserved 0 msec -
48
SYS_DELAY_Z4 Use 20 msec The delay that is used for high precision Z movement.
49
SYS_BACKLASH_Z Reserved 0 um -
81
ESCAPE_Z_FAST Use 21000 um
The Z-axis position at which the part is picked up and the
mirror begins to close in the case of the FLY_SS Cycle
(6000 ~ 45000).
Z Move
82
Factory
ESCAPE_Z_MNT_FAST Use 2500 um
The Z-axis height to which the XY can move when the Z-
axis moves up after performing placement in the case of
the FLY_SS Cycle (1000 ~ 6000).
The values other than the above are treated as 8000.