SM411F_Service Manual.pdf - 第47页
1.2. Calibration [F9] Used to perform calibrations related wi th the XY Gan try , Conveyor and camera. The order in which the calibration is perfo rmed and the calibration tool needed to perform the corresponding calibra…
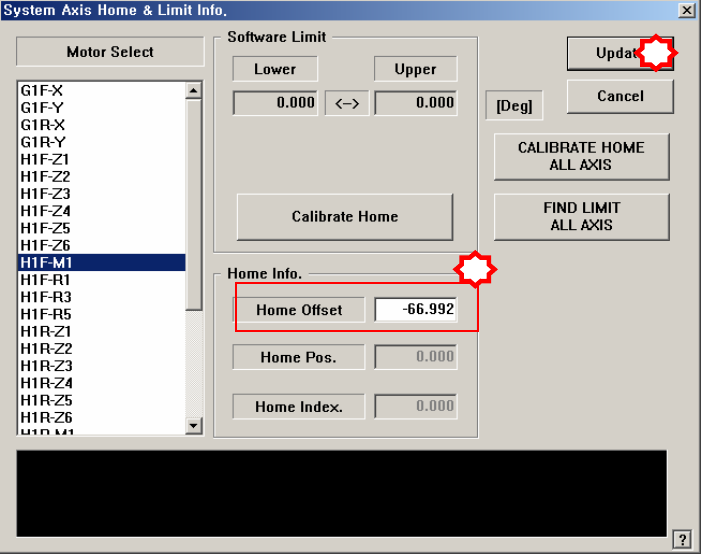
9. In the <Home Offset> edit box of the ‘System Axis Home & Limit Info.’
dialog box, input the value that was obtained after subtracting “180” from the
mirror value in the ‘Position’ dialog box in the above figure.
10. After finishing the input, click the <Update> button to reflect the changed
value.
11. Then select “No (N)” when prompted by the screen asking whether to perform
the homing of the machine.
12. Perform homing of the machine by using the teaching box.
1
2
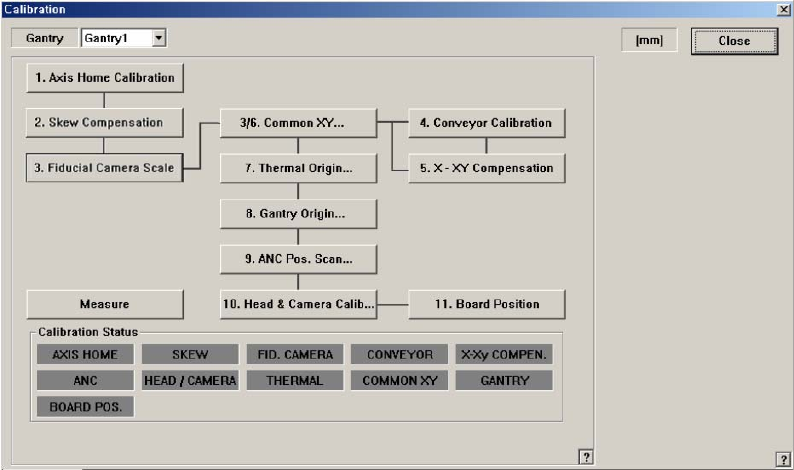
1.2. Calibration [F9]
Used to perform calibrations related with the XY Gantry, Conveyor and camera.
The order in which the calibration is performed and the calibration tool needed to
perform the corresponding calibration is as follows;
Axis Home Calibration
Skew Compensation
Fiducail Camera Scale Calibration
Common X-Y (1
st
)
Conveyor Calibration
X-XY Compensation – Calibration Bar
Common X-Y (2
nd
)
Thermal Mapping
Gantry Mapping
ANC Fiducial Mark Teaching
Head & Camera Calibration - CN040, LightFly Nozzle, LightFly Nozzle,
CNT20
Board Position
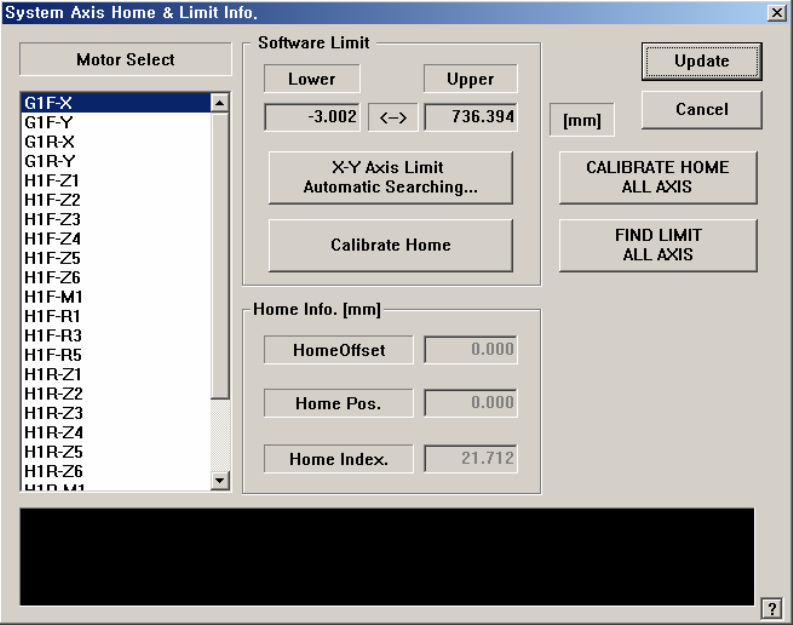
1.2.1. Axis Home Calibration
Sets the limit position of each axis to move. When this button is clicked on, the
following dialog box is displayed.
Figure 1-1. “System Axis Limit Info.” dialogbox
<Motor Select> listbox
Select the motor axis for which to set the limit. Available axes are as follows.
G1F-X: X axis of the gantry1
G1F-Y: Y axis of the gantry1
G1R-X: X axis of the gantry2
G1R-Y: Y axis of the gantry2
H1F-Z1: Z axis of head1 of the gantry1
H1F-Z2: Z axis of head2 of the gantry1
H1F-Z3: Z axis of head3 of the gantry1
H1F-Z4: Z axis of head4 of the gantry1
H1F-Z5: Z axis of head5 of the gantry1
H1F-Z6: Z axis of head6 of the gantry1
H1F-M1: Mirror axis of the Gantry1
H1F-R1: Theta axis (H1, H2) of the Gantry1
H1F-R3: Theta axis (H3, H4) of the Gantry1
H1F-R5: Theta axis (H5, H6) of the Gantry1
H1R-Z1: Z axis of head1 of the Gantry2