SM411F_Service Manual.pdf - 第85页
1.2.10.3. Head Z / R Offset Calibration The distance from the upper surface of the PCB to the Z axis home is set mechanically . For the Z offset calibration, measure the offset for this distance based on the upper surfac…
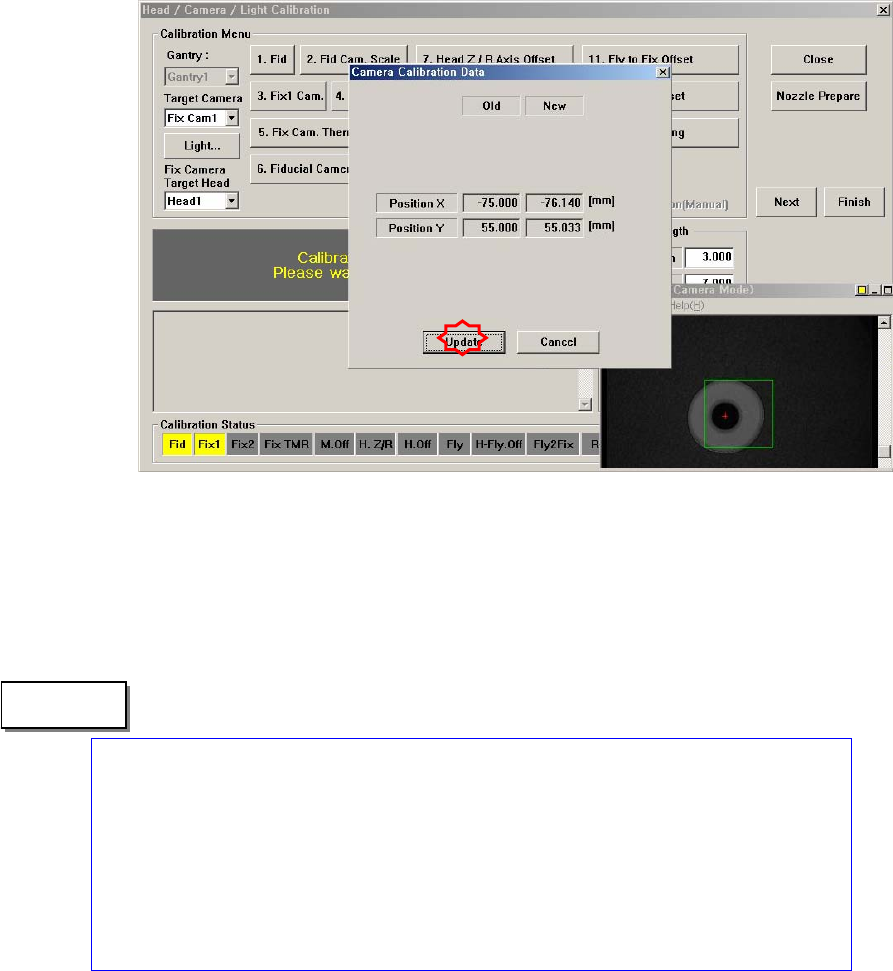
5. The calibration is performed automatically. If it is completed, the calibration
result is indicated as shown in the following figure. Click the <Update> button
to apply the calibration value.
6. If the calibration procedure is completed properly, the result as shown in the
following figure is displayed and then the message, “Move (Fiducial/Teach)
Camera Offset is Finished. Remove Tool Plate!” appears. At this point, remove
the flat board calibration tool placed on the Fix 1 Camera. Otherwise, damages
may be caused by collision with the head.
The reference values for the calibration of the Fiducial Camera Offset is as follows.
Gnatry 1
Offset X : -210.5mm ~ -208.5mm
Offset Y : -1.0mm ~ 1.0mm
Gnatry 2
Offset X : 210.5mm ~ 208.5mm
Offset Y : -1.0mm ~ 1.0mm
"Memo
1.2.10.3. Head Z / R Offset Calibration
The distance from the upper surface of the PCB to the Z axis home is set
mechanically. For the Z offset calibration, measure the offset for this distance based
on the upper surface of the PCB by using pneumatic pressure.
For the R offset calibration, measure the offset of the angle to align the nozzle
holder based on zero (0) degrees.
The following is the process that the Z offset calibration is performed. The nozzle
used for calibration is the CN040 nozzle.
1. Click the <Nozzle Prepare> button and remove all nozzles inserted in the
nozzle holders of all heads. Insert the CN040 nozzle into the No. 14 hole of the
ANC.
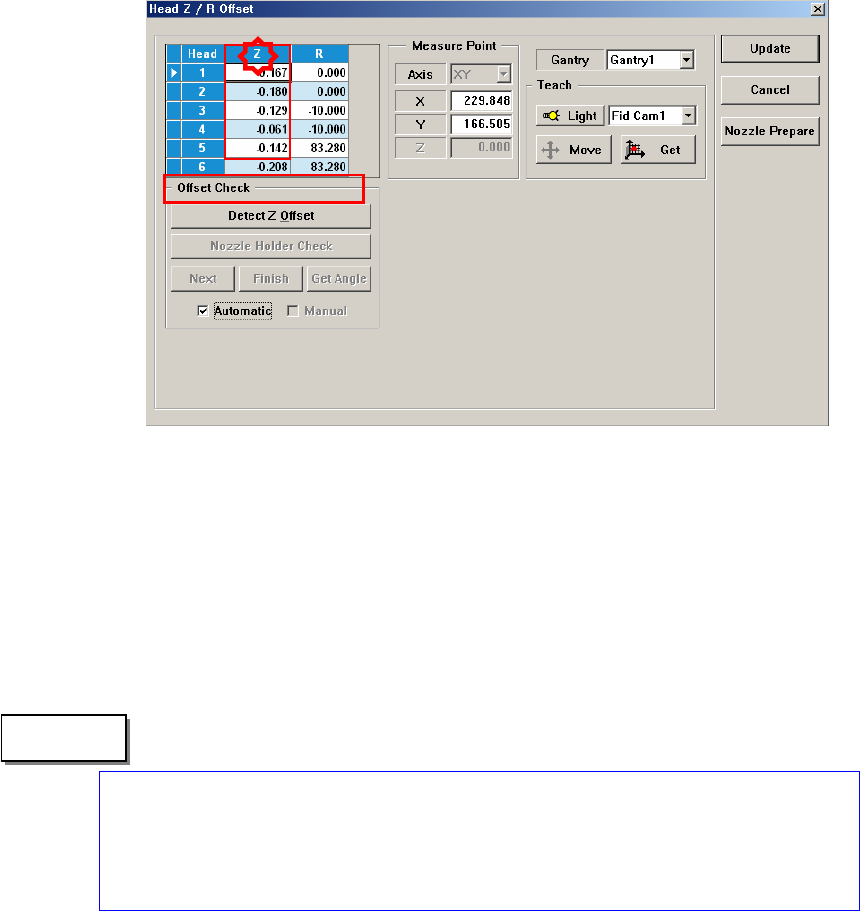
2. In the <Grid> group, select the Z axis for which the calibration is to be
performed and click the <Detect Z Offset> button after selecting the
<Automatic> check box.
3. The head moves to the designated position on the ANC automatically. Then the
machine creates pneumatic pressure and performs calibration while moving the
spindle down from Head 1 to Head 6 in order.
4. If the calibration is completed, the calibration result is reflected on the Z
column of the <Grid> group automatically. When performing calibration
manually, insert the CN040 nozzle into each head in order manually and move
down the spindle to perform calibration while checking the pneumatic pressure
of the head in the Vacuum dialog box.
5. Click the <Update> button to apply the calibration result to the machine.
The reference values for the Z-offset are as follows.
Head1~ Head6: -1.5 ~ 1.5 mm
If the Z offset value exceeds this range, it means that the head has a serious
problem. Therefore, check for the home location, spindle, LM, and verify if the
motor operates normally.
"Memo
The following is the procedure to perform the ‘R-Offset Calibration’.
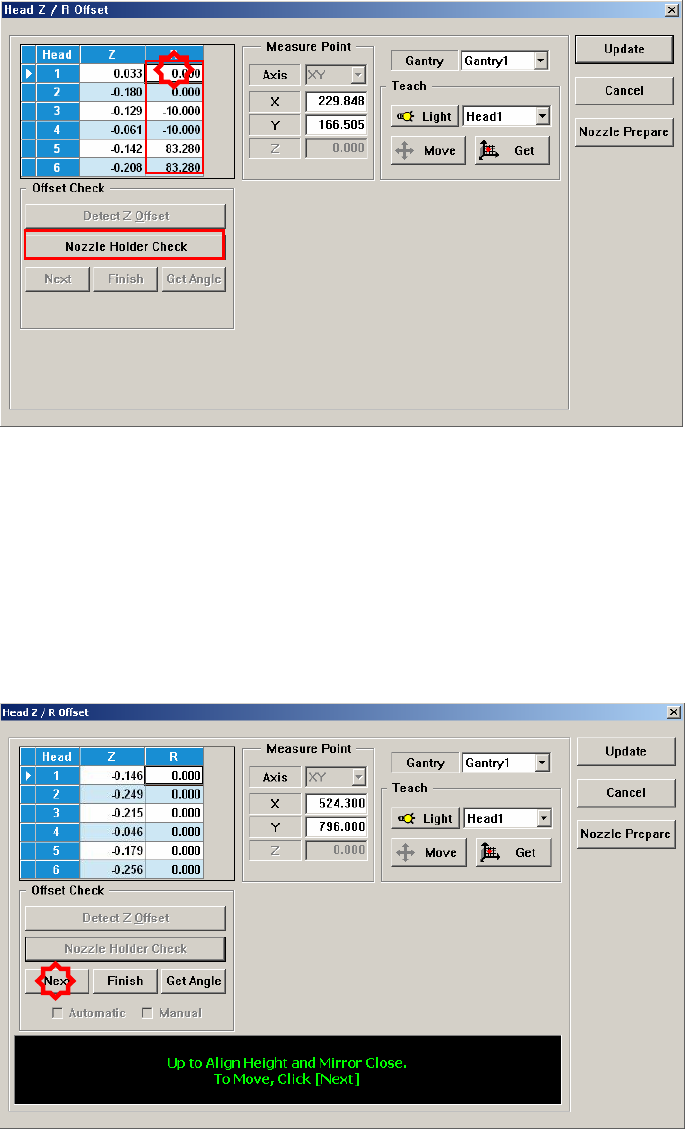
1. In the <Grid> area, input “0” for all R-axis values of the heads for which the
calibration is to be performed.
2. In the <Grid> group, select the R-axis for which the calibration is to be
performed and click the <Nozzle Holder Check> button.
3. Then the message “Please Check and Register Nozzle CNT0 to ANC 1-2 Hole.
First, We must Put all Nozzles from Heads manually. To Moving Down Z Axis,
Click [Next]” appears in the message window.Remove all nozzles inserted in
the nozzle-holder manually by clicking the <Next> button. At this time, for the
ANC, the virtual nozzle CNT0 is set for the No. 1 hole of the ANC and it is
regarded that the corresponding head picked the CNT0 nozzle.
4. Then the message “Up to Align Height and Mirror Close. To Move, Click
[Next].” appears. Then move the spindle to the part recognition height so that
the nozzle holder of the head can be seen from the fly camera and click the
<Next> button to close the mirror.
5. Execute the ‘Current Position’ dialog box by clicking the shortcut menu.