D-serie LEVEL II.pdf - 第115页
Axis Dynamics Zero Pulse at the Track Signal Encoder Axis Control Assemblies S tude nt Guide Advanced Level 2 SIPLACE D Series EN 05/2007 Axis Dynamics 7-9 7.3 Axis Control Assemblies The contro l circuit for co ntrol th…
Axis Dynamics
Position Measuring System Zero Pulse at the Track Signal Encoder
Student Guide Advanced Level 2 SIPLACE D Series
Axis Dynamics EN 05/2007
7-8
7.2.2 Zero Pulse at the Track Signal Encoder
Each incremental encoder system needs initializing. This means a reference run is executed for each
axis. At the reference run the system searches for a certain position - the signal for this is the Zero pulse.
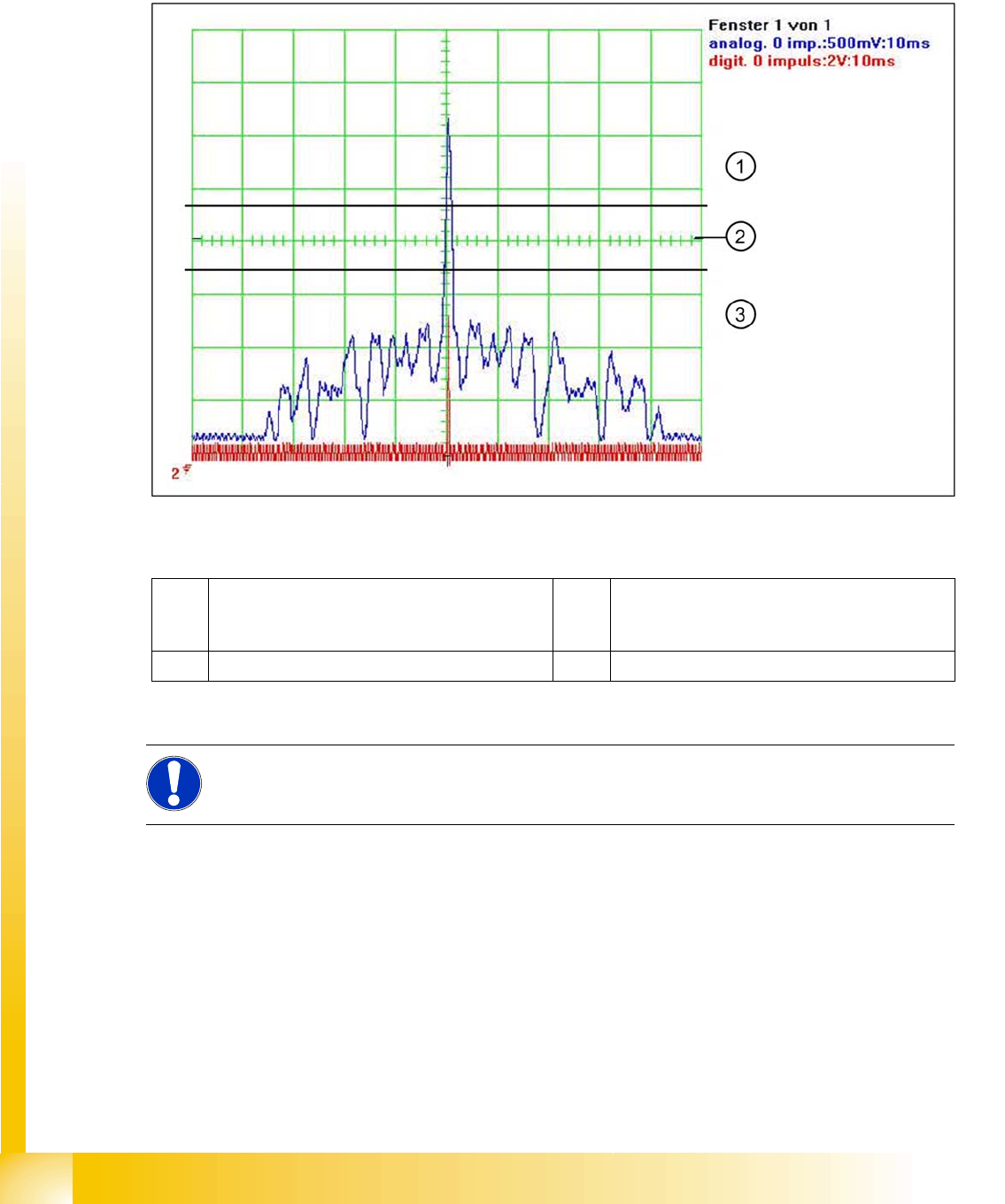
The Zero pulse is an analog signal and a ’Schmitt Trigger’ circuit digitizes it.
(Measurement of analog signal by setting the
zero line
at the center of the screen)
7-6: Analog and digital zero pulse signal (zero line set at screen center)
Legend
At around 2.5 V the Schmitt trigger circuit issues a brief, high pulse: the zero pulse for the position
measurement system. If the encoder has been installed too near to the incremental scale, one of the
auxiliary pulses could exceed the Schmitt trigger threshold and be mistakenly recognized as the zero
pulse. This would mean that the zero pulse would be recognized in the wrong position on the incremental
scale. This would then lead to a placement offset on the SIPLACE machine. The digital zero pulse is
measured on the gantry head distributor, with a probe at Pin 8 of the test connector. The inverted zero
pulse can be measured at the zero pulse output on the axis test box (or the SIPLACE AxisTester SAT).
The A364 axis controller considers all the zero pulses on the track scale i.e. even those which are
repeated after 50 mm.
1 The analog zero pulse needs to be 0.3 V higher
than the trigger threshold for the digital zero
pulse.
3 Glitches (signal noise) should not override the
limit 0,3 V less than Trigger threshold!
2 Schmitt trigger threshold
NOTE:
The A364 axis controller detects each X/Y scale zero pulse and checks the count values for
errors.
Axis Dynamics
Zero Pulse at the Track Signal Encoder Axis Control Assemblies
Student Guide Advanced Level 2 SIPLACE D Series
EN 05/2007 Axis Dynamics
7-9
7.3 Axis Control Assemblies
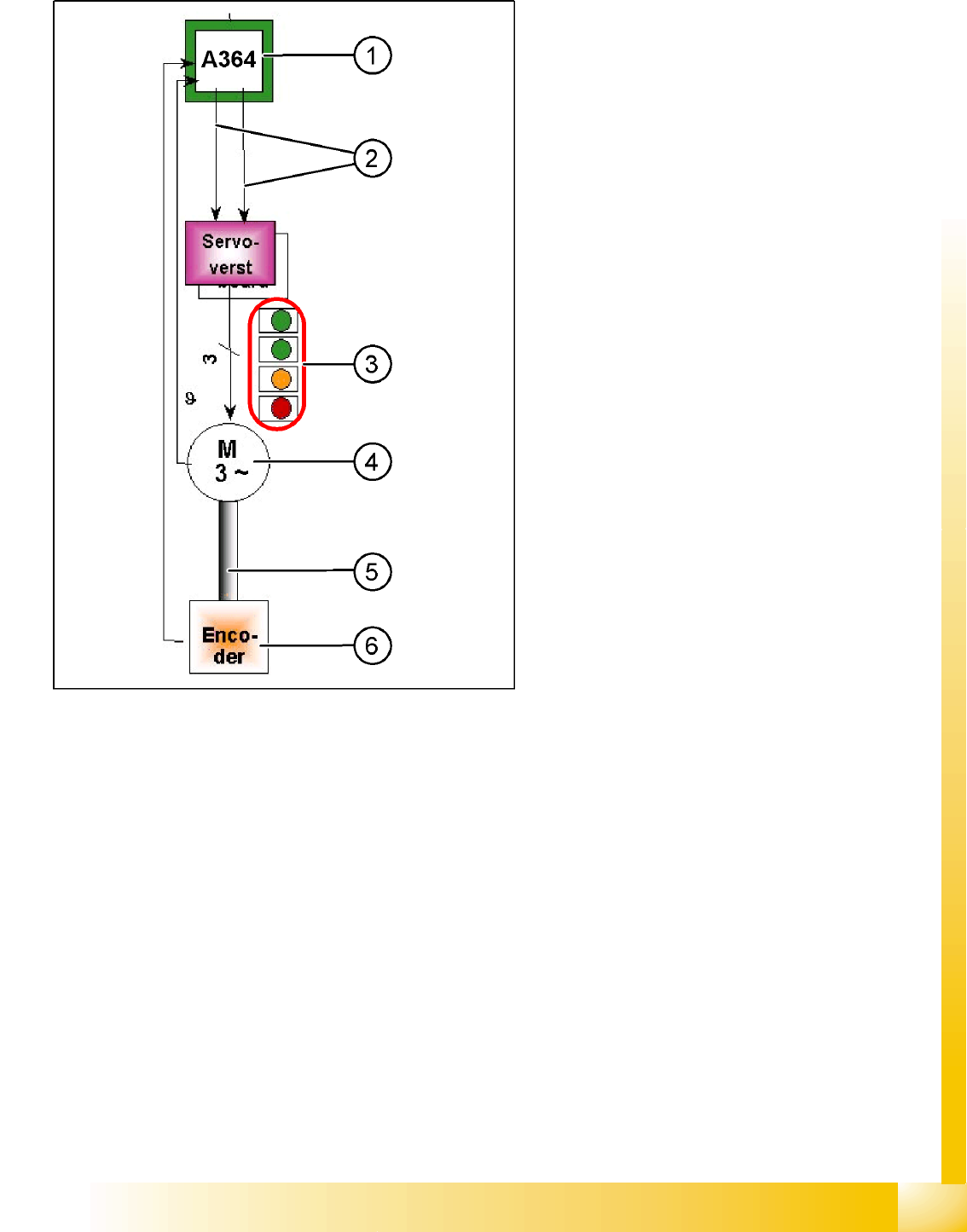
The control circuit for control the X- and Y-axis in general consist of the following parts:
Axis board
Servo board (TDS) with braking board
3-phase AB linear motor (Y-axis)/
3 phase AC (rotation) motor (X-axis)
Measurement system (incremental scale and encoder (read unit))
To protect the motor of the X/Y-axes from overtemperature, these have an internal temperature sensor.
7-7: Parts "Axis control"
Legend
1. Axis Board A364
2. Control signals I
target
"W" and I
target
"U"
3. LED‘s on Servo board:
– Power supply ON
– Servo enable, it the enable signal from the
axis board.
– Display R.M.S. current limiter shorter than
2,5 s.
– Error: Over voltage, -current, -temperature
longer than 2,5 sec.
4. 3-phase AC linear motor (Y-axis) or 3-phase
servo motor with integrated temperature
sensor.
5. Between motor and incremental encoder exist
a fixed mechanically connection.
6. Incremental encoder: transmit the exact
position of the axis The track signals are the
only feedback signals for the axis control
system.
The servo board directly controls the linear motor
(intermediate circuit voltage 250 V) or servo
motor.
Axis Dynamics
Axis Control Assemblies Axis Controller
Student Guide Advanced Level 2 SIPLACE D Series
Axis Dynamics EN 05/2007
7-10
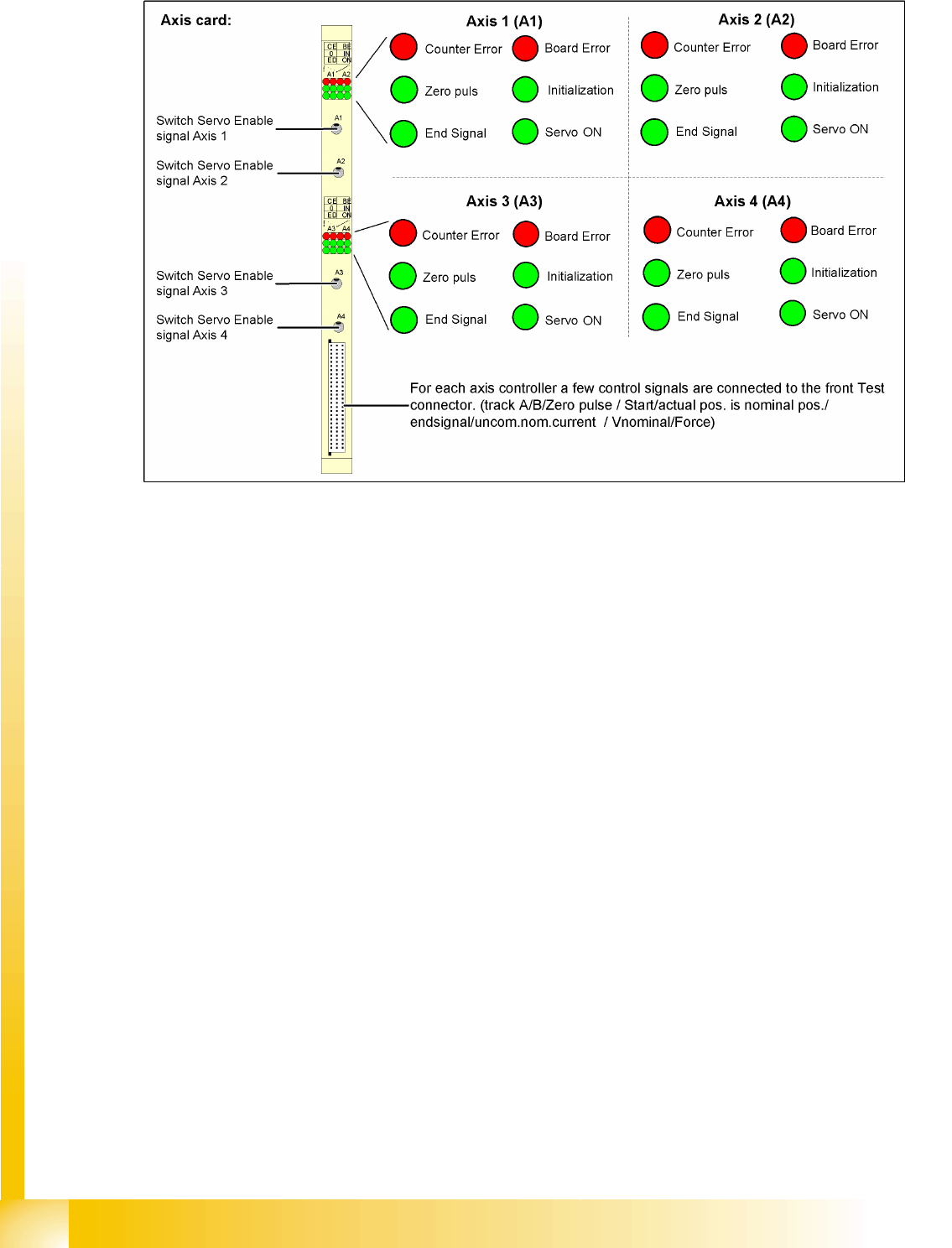
7.3.1 Axis Controller
7-8: View of the SIPLACE machine axis controller A364 and its test signals
The axis controller receives the target position and the start signal from the MC. All relevant calculations
and control actions are performed by the axis controller.
The axis controller A364 in the SIPLACE machine is socket coded. This means that no address switches
need to be set when parts are replaced.
The communication and axis control functions are handled by the axis controller.
The relevant
BIOS SW is responsible
Application 1, Application 2
Due to the various types of drives (motors), you will need different entries for the control parameters.
This results in different firmware versions for the axis types.