KE-3010_MS参数.pdf - 第70页
MS 参数 4- 35 <操作 ・ 3/7 > 将显示以下操作内容,故利用示教移动 Head ,使传感器光射到校准台的平 坦部分。此 时,请确认传感器 被启动(传感器 头的 LED 双方均亮 灯),按下 “ 确认 ” 按钮。 “ 确认 ” 按 钮被按下后,将通过传 感器测量装 配的虚拟高度。 (虚拟高度) <操作 ・ 5/7 > 虚拟高度的计测结束后 ,请按 “ 确认 ” 按钮。 “ 确认 ” 按钮被选择 后, HMS 向校准台第 1 …
MS
参数
4-34
4-12 HMS
偏移量
4-12-1
功能
取得距OCC的HMS安装位置、装配高度。
4-12-2
使用模具
本项目中不使用模具。
4-12-3
操作
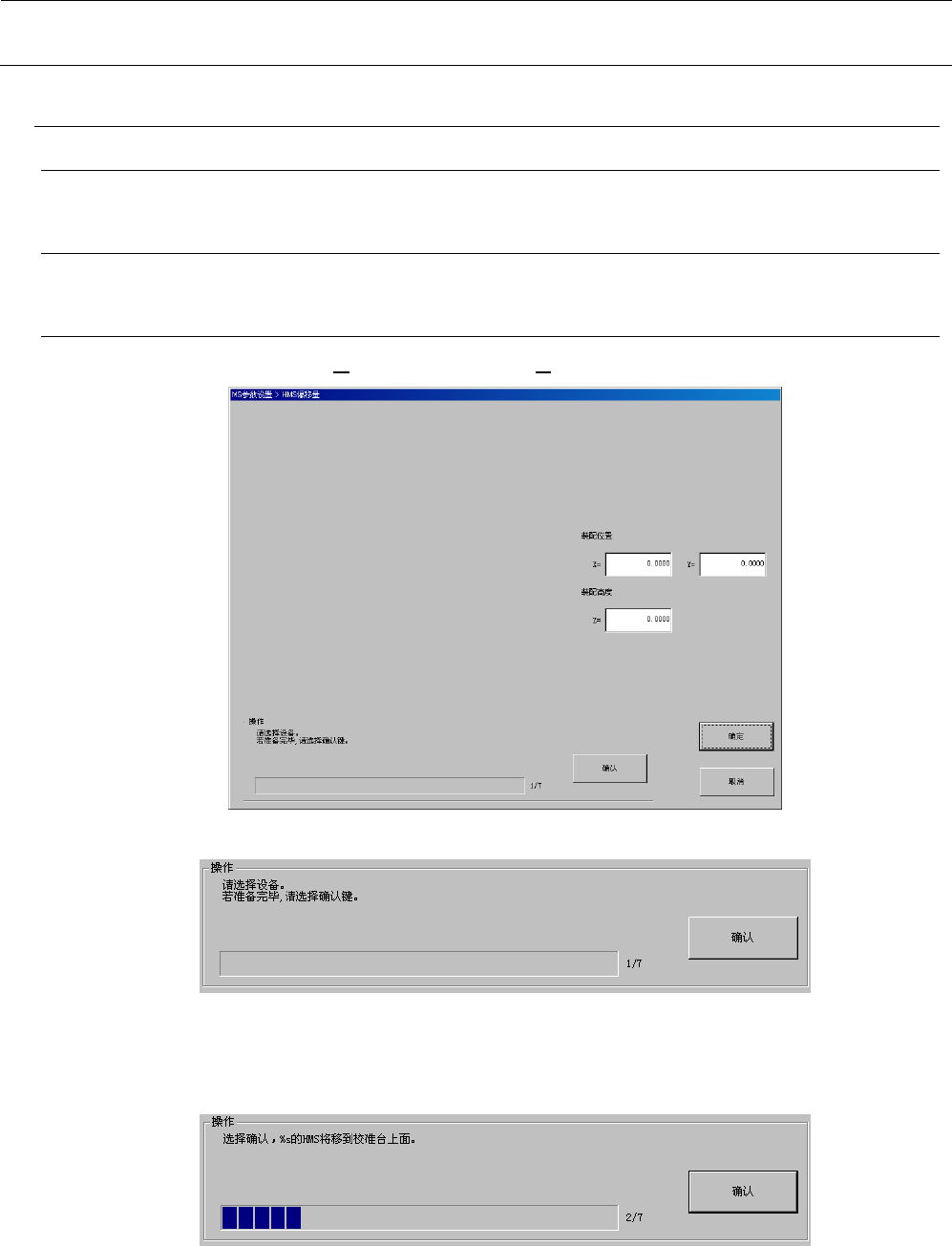
从菜单中选择“偏移量设置(O)”-“HMS偏移量(H)”,会显示以下对话框。
<操作・
1/7
>
按下“操作”框内的“确认”按钮。
按下后,为了确认校准台上没有模具之类,进行Head退避。
<操作・
2/7
>
请确认校准台上没有模具之类。
确认完毕后,按下“操作”框内的“确认”按钮。
Head单元以HMS基准移动到校准台上。
MS
参数
4-35
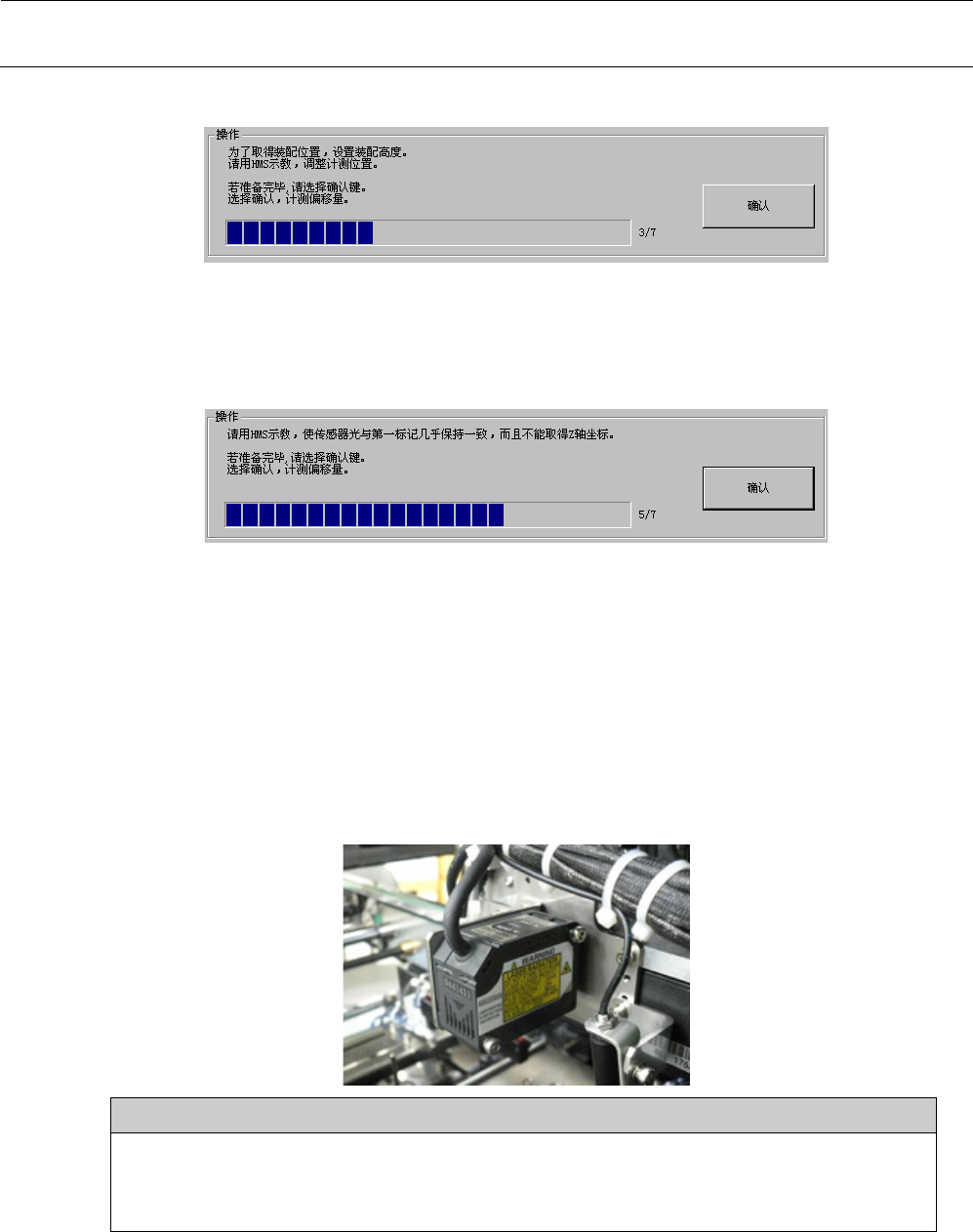
<操作・
3/7
>
将显示以下操作内容,故利用示教移动Head,使传感器光射到校准台的平坦部分。此
时,请确认传感器被启动(传感器头的LED双方均亮灯),按下“确认”按钮。“确认”按
钮被按下后,将通过传感器测量装配的虚拟高度。(虚拟高度)
<操作・
5/7
>
虚拟高度的计测结束后,请按“确认”按钮。
“确认”按钮被选择后,HMS向校准台第1标记位置移去。
当出现以下对话框时,请利用HMS示教逐步移动Head,使传感器光与校准台的第1标
记相一致。
此时,请确认传感器被断开(传感器感应头的LED双方均闪烁,示教画面的Z坐标值不
被显示),结束示教,按下“确认”按钮。
“确认”按钮被选择后,开始通过HMS传感器计测校准台第1标记的位置。
•
计测内容
① 根据利用HMS取得的高度之差,计测校准台第1标记的中心位置。
② 根据第①步中算出的第1标记的中心位置和已知的校准台第1
标记的位置,算出装配位置
并进行更新。
MS
参数
4-36
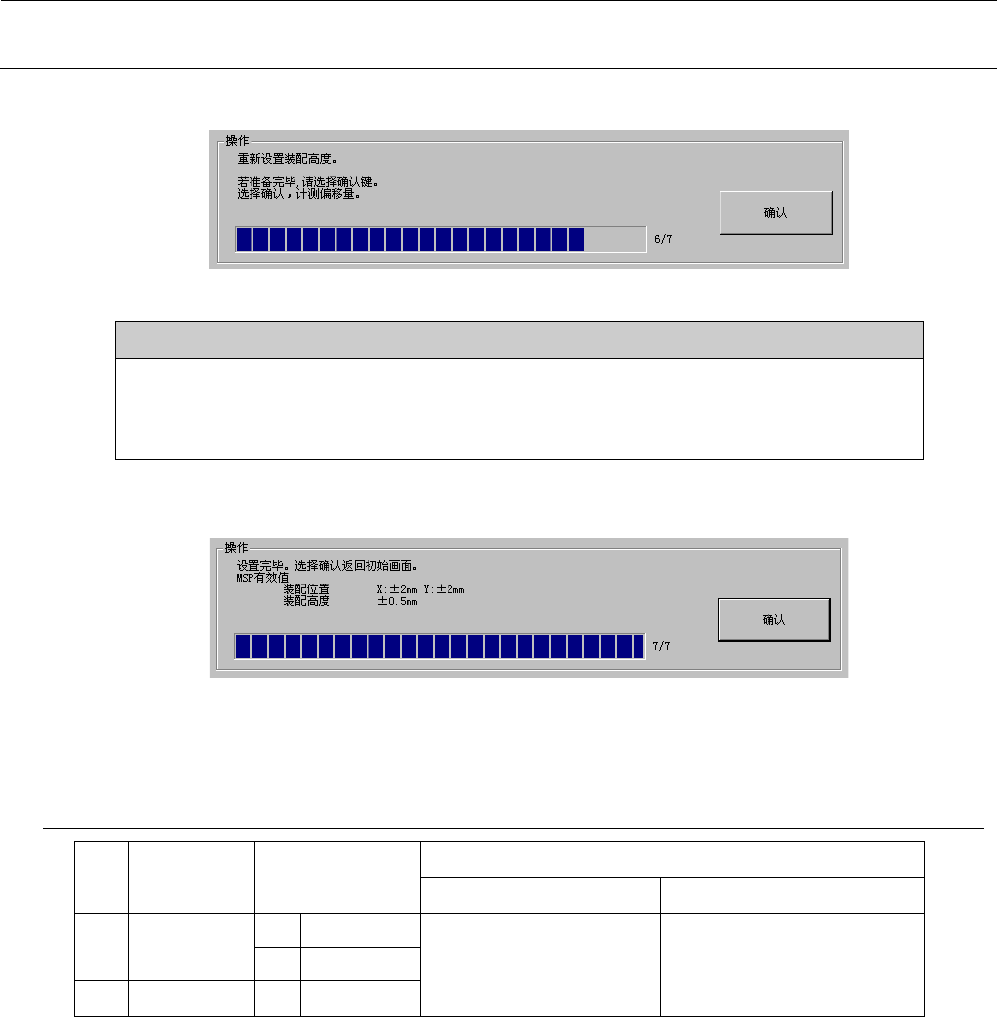
<操作・
6/7
>
HMS的XY偏移量的计测结束后,请按“确认”按钮,再次进行高度计测。
•
计测内容
① 分别计测校准台上的9处高度。
② 在取得的9处高度中,去除最高2处、最低2处,将剩余的5
处之平均值作为装配高度,
并进行更新。
<操作・
7/7
>
所有的计测结束后,会显示以下的对话框。
按下“确认”后,返回初始设置画面。
4-12-4 MSP
容许值
No.
项目
MSP
容许值
MSP
值不良时
出现的问题
检测(更换)项目
1
装配位置
X ±2mm
吸取高度示教不良 装配位置精度
Y ±2mm
2
装配高度
Z ±0.5mm