JM-20_动作说明书.pdf - 第10页
Rev 1.0 动作说明书 2-2 2-1-2 性能 用于 Y 轴驱动的电动机及磁性标尺的性能如下表所示。 项目 规格 备注 电动机 额定输出 1500 [W] 额定转速 3000 [r/min] 最大转速 4500 [r/min] 编码器分辨率 262144 [pulse/rev] 编码器输出 三菱串行 通过伺服放大器参数的传动比设定, 指令 1 脉冲的移动量被设定为 1μm 。 (传动比: 40000/262144 ) 2-1-3 …
Rev 1.0
动作说明书
2-1
2 各驱动轴(X, Y, Z, θ轴)的说明
2-1 Y轴
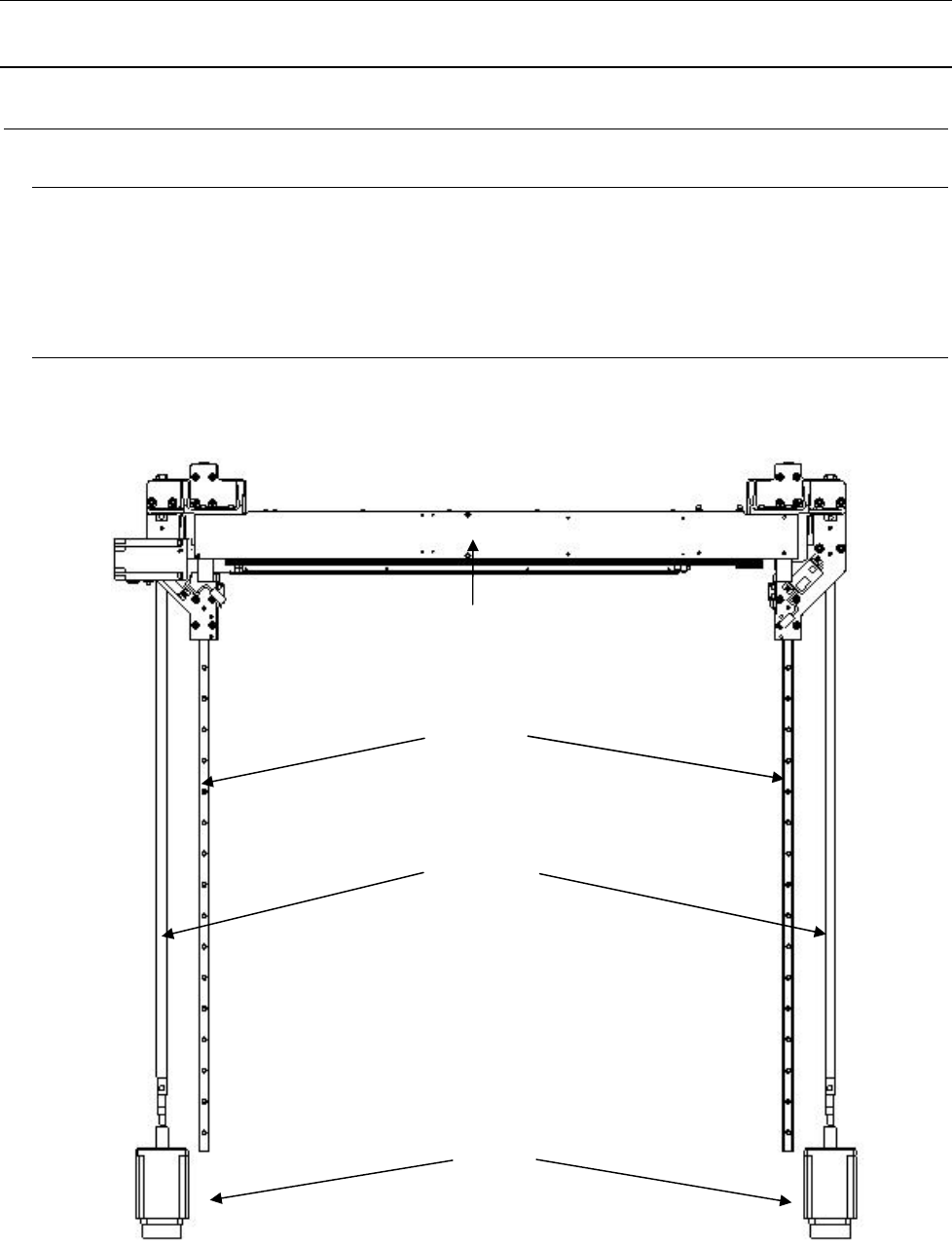
本轴是进行元件贴装头向 Y 轴方向(从装置正面看是从内部向身前、从身前向内部驱动)驱动的轴。
驱动用电动机安装在左右两侧,以串联驱动方式工作,位置控制以半闭环控制方式工作,只利用电动
机的编码器。
2-1-1 组成
・减速比 1 : 1
・平均马达 1 圈的移动量为 40mm(滚珠螺杆螺距)
Y 电动机
Y 滚珠螺杆
Y_LM 导轨
X 轴框架
图 2-1 Y 轴的构成
Rev 1.0
动作说明书
2-2
2-1-2 性能
用于 Y 轴驱动的电动机及磁性标尺的性能如下表所示。
项目 规格 备注
电动机 额定输出 1500 [W]
额定转速 3000 [r/min]
最大转速 4500 [r/min]
编码器分辨率 262144 [pulse/rev]
编码器输出 三菱串行
通过伺服放大器参数的传动比设定, 指令 1 脉冲的移动量被设定为 1μm。(传动比:40000/262144)
2-1-3 故障检测(电动机编码器的断线检测)
① 以伺服放大器进行通信故障检测,当电缆线脱落时发出 ALM16,伺服断开。
② 以伺服放大器进行通信故障检测,因断线等导致通信故障发出 ALM20,伺服断开。
Rev 1.0
动作说明书
2-3
2-2 X轴
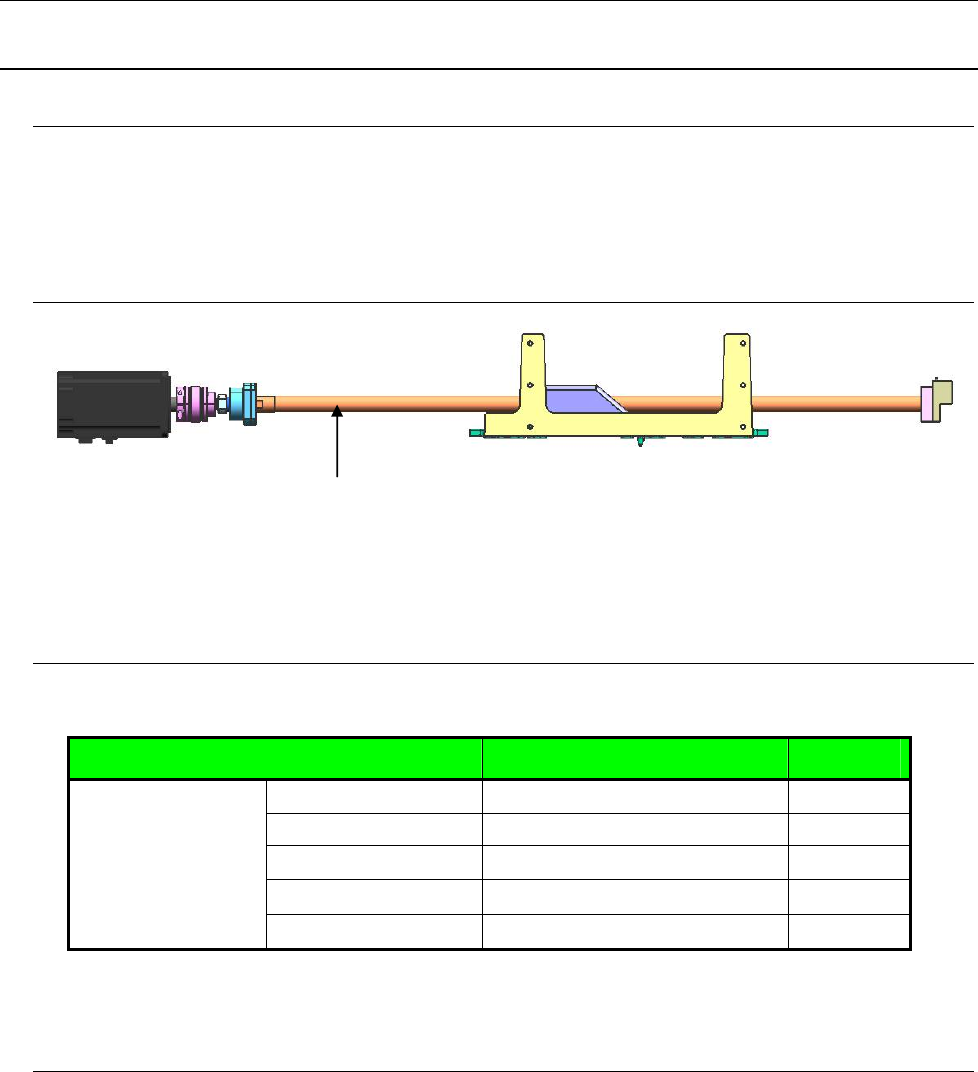
本轴是进行元件贴装头向 X 轴方向(从装置正面看是从右向左、从左向右驱动)驱动的轴。
驱动用电动机安装在右侧,以单侧滚珠螺杆驱动方式工作,位置控制以只利用电动机编码器的半闭环
控制方式工作。
2-2-1 组成
X 滚珠螺杆
・减速比
1 : 1
・平均马达 1 圈的移动量为 40mm(滚珠螺杆螺距)
2-2-2 性能
用于 X 轴驱动的电动机及磁性标尺的性能如下表所示。
项目 规格 备注
电动机 额定输出 750 [W]
额定转速 3000 [r/min]
最大转速 6000 [r/min]
编码器分辨率 262144 [pulse/rev]
编码器输出 三菱串行
通过伺服放大器参数的传动比设定, 指令 1 脉冲的移动量被设定为 1μm。(传动比:40000/262144)
2-2-3 故障检测(外部编码器的断线检测)
① 以伺服放大器进行通信故障检测,当电缆线脱落时发出 ALM16,伺服断开。
② 以伺服放大器进行通信故障检测,因断线等导致通信故障发出 ALM20,伺服断开。