JM-20_动作说明书.pdf - 第18页
Rev 1.0 动作说明书 3-5 异常种类 内容 IN 缓冲异常 1) IN 马达 ON 后, IN 传感器 3 秒以上 ON 。 2)IN 马达转动时, IN 传感器和 WAIT 传感器同时变为 ON 。 3) IN 传感器 ON ,从 IN 马达开始转动起 6 秒钟之后, WAIT 传感器也不 ON 。 ( 有关时间,由机械控制参数决定 ) 4) 从 IN 缓冲向中心缓冲过度经 6 秒之后也不结束 。 ( 有关时间,由机械控制参数…
Rev 1.0
动作说明书
3-4
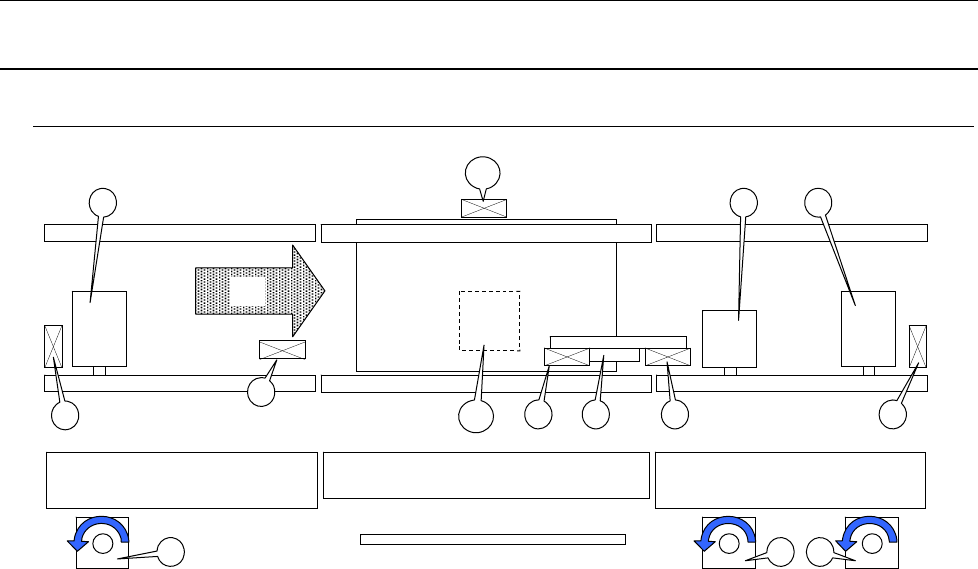
3-2 基板传送
A
11
7 89
5
6
10
4
2
2 3
3
1
1
1.
IN 马达(步进马达)
2. CENTER 马达(步进马达)
3. OUT 马达(步进马达)
4. IN 传感器
5. WAIT 传感器
6. STOP 传感器
7. C・OUT 传感器
8. OUT 传感器
9. 止动器
10. 支撑台电动机(步进马达)
1
1. 支撑台原点传感器
Rev 1.0
动作说明书
3-5
异常种类 内容
IN 缓冲异常 1) IN 马达 ON 后,IN 传感器 3 秒以上 ON
。
2)IN 马达转动时,IN 传感器和 WAIT 传感器同时变为 ON
。
3) IN 传感器 ON,从 IN 马达开始转动起 6 秒钟之后,WAIT 传感器也不 ON
。
(有关时间,由机械控制参数决定)
4) 从 IN 缓冲向中心缓冲过度经 6 秒之后也不结束
。
(有关时间,由机械控制参数决定)
中心缓冲异常 1)中心马达连续转动 6 秒钟以上
。
2) C・OUT 传感器 ON,STOP 传感器 OFF->ON
。
3) 从中心向 OUT 缓冲过度经 6 秒之后也不结束
。
(有关时间,由机械控制参数决定)
OUT 缓冲异常 1) OUT 马达连续 6 秒钟以上连续转动
。
2) 出口侧 C・OUT 传感器和 OUT 传感器通知变为 ON
。
3) 从 ReadyIN(ON)信号检测向后续工程过度经 6 秒之后也不结束
。
(有关时间,由机械控制参数决定)
支撑台错误 1) 在支撑台电动机上升结束时 T・PIN 传感器启动(以孔为基准时)
。
其他 1) 步进电动机错误
2) 支撑台电动机动作故障
3-2-1 传送电动机
如下表所示,电动机的旋转方向根据机器规格而不同。
传送方向 左→右 右→左
基准 身前 身前
正转 CCW CW 电动机旋转方向
反转 CW CCW
速度控制方式是三角形驱动(梯形驱动)。
速度档次有高速·中速·低速 3 级以及基板夹紧·重新夹紧时使用的预备进给 1·预备进给 2。
并且,通过参数设定,高速可以切换到 400mm/s 或 300mm/s。
252μm/脉冲,各速度分类值如下表所示。
最高速度 最高加速度 最高减速度
(mm/s) (pps) (mm/s
2
) (pps
2
) ( mm/s
2
) (pps
2
)
高速 400 1,587 1008.0 4,000 1008.0 4,000
高速 300 1,190 1008.0 4,000 1008.0 4,000
中速 230 913 1008.0 4,000 1008.0 4,000
低速 130 515 1008.0 4,000 1008.0 4,000
预备进给 1 56 222 1008.0 4,000 1008.0 4,000
预备进给 2 14 55 1008.0 4,000 1008.0 4,000
Rev 1.0
动作说明书
3-6
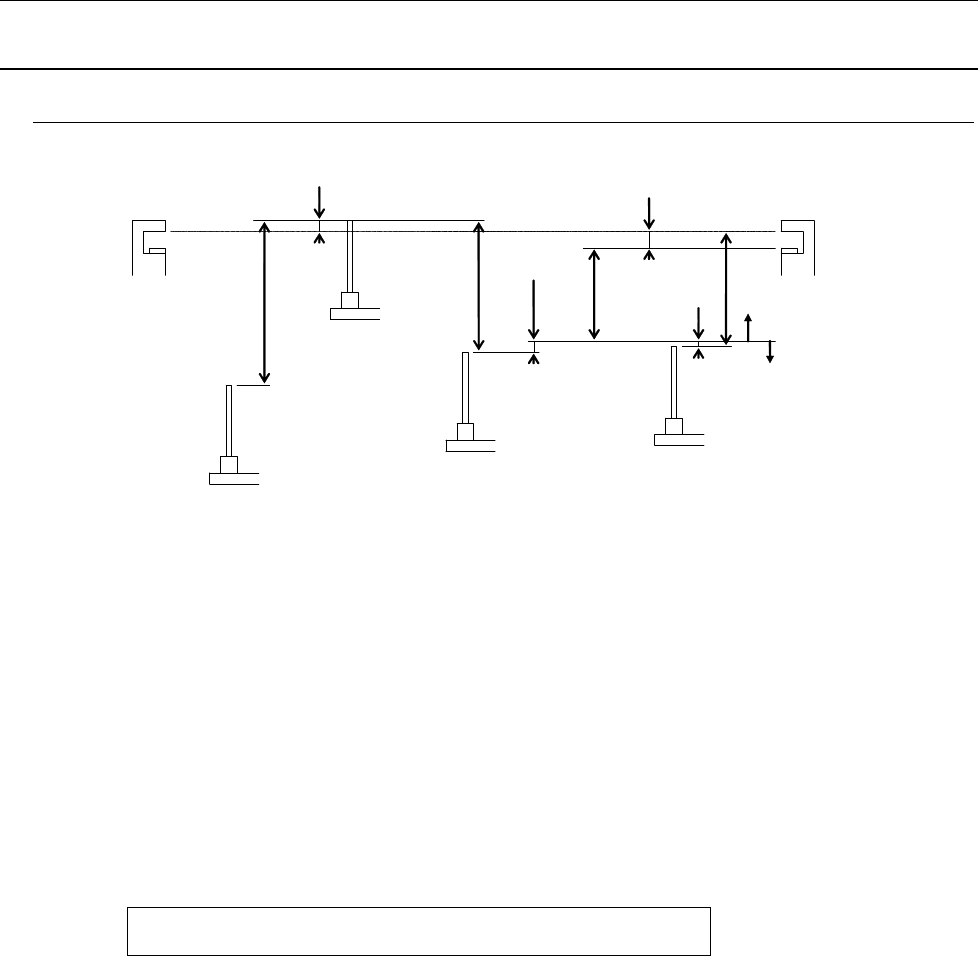
3-2-2 支撑台
支撑台、机械控制以及有效行程
基板上面高度
0.5mm
5mm
有效行程 52.5mm
MS 参数输入
2 mm
7mm
40mm(最大)
最大基板下限制
机械行程 59mm
④原点高度位置
B(原点传感器 ON 方向)
A(原点传感器 OFF 方向)
变换器检测零相
③软下方限制位置
①机械下方限制位置
②机械上方限制位置
①: 下方向的机械限制高度
②: 上方向的机械限制高度
③: 在有效行程下限位置,是基板送入、送出时的待机位置。
有效行程上限位置从③的高度上升 52.5 mm上升位置、与②高度相同。
有效行程∶ 生产中可以驱动的行程范围
(注) 基板下限制可以在从 5mm 起 40mm 的范围,以1 mm 单位进行设定。
违反的基板下限制为 40 mm。
(注) ③的有效行程下限高度,根据基板下限而变化。
因此,有效行程也按下式变化。
有效行程(mm) =基板下限(mm)+5+7+0.5
基板送入·送出时的待机高度也同样变化。
以有效行程上限为基准高度
待机高度(mm)=基板下限(mm)+5+7