JM-20_动作说明书.pdf - 第79页
Rev 1.0 动作说明书 5-6 5-1-10 FEEDER I/F 基板 FEEDER I/F 基板通过专用的串行 I/F 与 MI FEEDER 基板进行通信, 是对径向供料器、 碗式供料器 等进行控制的基板 。 下面是控制的内容 。 ① 径向供料器内部电磁阀的驱动 ② 碗式供料器内部电磁阀的驱动 ③ 碗式供料器内部的传感器 ④ 碗式供料器内部电动机的驱动 FEEDER I/F 基板上安装 3 个 LED 。以下是各 LED 的意…
Rev 1.0
动作说明书
5-5
5-1-5 BASE基板
位于 IO-20 电路板与底座部/盖罩部电气部之间,对以下信号进行中继。
① IN、OUT、WAIT、C.OUT、STOP 传感器
② ATC、限动器等 SV的驱动
。
③ ATC 开闭的确认传感器
④ 供料器浮起传感器、初压检测传感器、真空校正传感器
⑤ 校正块 LED 的亮灯、真空的启动、信号灯的驱动
⑥ XY 轴的±极限传感器、与位置运动控制板间交换 NEAR 传感器信号
。
BASE 基板上安装 4 个 LED。以下是各 LED 的意义。
LD1(绿):正在从+24V 输出基板内部生成的 3.3V 时亮灯
。
LD2(绿):+24V 正在输入到基板内部时亮灯
。
LD4(绿):正在输入+12V 时亮灯
。
LD5(绿):正在输入+5V 时亮灯
。
5-1-6 HEAD MAIN基板
① 驱动真空及吹气用电磁阀。
② 进行以真空传感器检测的真空压力数据的读入。
③ 进行与 HMS 的 I/F。
④ 进行 OCC 照明的光量调整。
⑤ 驱动 Head 提升气缸用的电磁阀。
⑥ 进行电空变换器的真空压力数据的读入、驱动。
5-1-7 IP-X5 基板
此基板是处理用 OCC、VCS 摄像机拍取的基板标记、IC 标记、IC 芯片等图象数据,计算出基板位
置矫正、零件位置矫正所需要的值的图象处理基板
。
5-1-8 LIGHT CTRL基板
本基板用于控制设置在座架上的 VCS 装置的各种照明的亮灯、熄灯以及进行光量调节。
并且,选择高解像度照相机选项时,进行照明位置切換气缸的驱动及位置检测传感器的读入。
5-1-9 BANK基板
BANK 基板通过专用的串行 I/F 与 MI-FEEDER 基板进行通信,是对径向供料器、碗式供料器等进
行控制的基板
。
下面是控制的内容
。
BANK 基板上安装 2 个 LED。以下是各 LED 的意义。
LD1(橙):正在从+24V 输出基板内部生成的 3.3V 时亮灯
。
LD10(橙):正在输入+24V 时亮灯
。
Rev 1.0
动作说明书
5-6
5-1-10 FEEDER I/F 基板
FEEDER I/F 基板通过专用的串行 I/F 与 MI FEEDER 基板进行通信,是对径向供料器、碗式供料器
等进行控制的基板
。
下面是控制的内容
。
① 径向供料器内部电磁阀的驱动
② 碗式供料器内部电磁阀的驱动
③ 碗式供料器内部的传感器
④ 碗式供料器内部电动机的驱动
FEEDER I/F 基板上安装 3 个 LED。以下是各 LED 的意义。
LD1(橙):+24V 正在输入到基板内部时亮灯
。
LD2(橙):正在从+24V 输出基板内部生成的 3.3V 时亮灯
。
LD3(红):FPGA 的程序写入结束时亮灯。
5-1-11 DRV基板
DRV 基板从 FEEDER I/F 基板接收电动机的脉冲,使圆筒式振动供料机的电动机工作。
DRV 基板上安装 2 个 LED。以下是各 LED 的意义。
LD1(橙):+24V 正在输入到基板内部时亮灯
。
LD2(橙):正在从+24V 输出基板内部生成的 5V 时亮灯
。
Rev 1.0
动作说明书
5-7
5-2 马达的控制方式
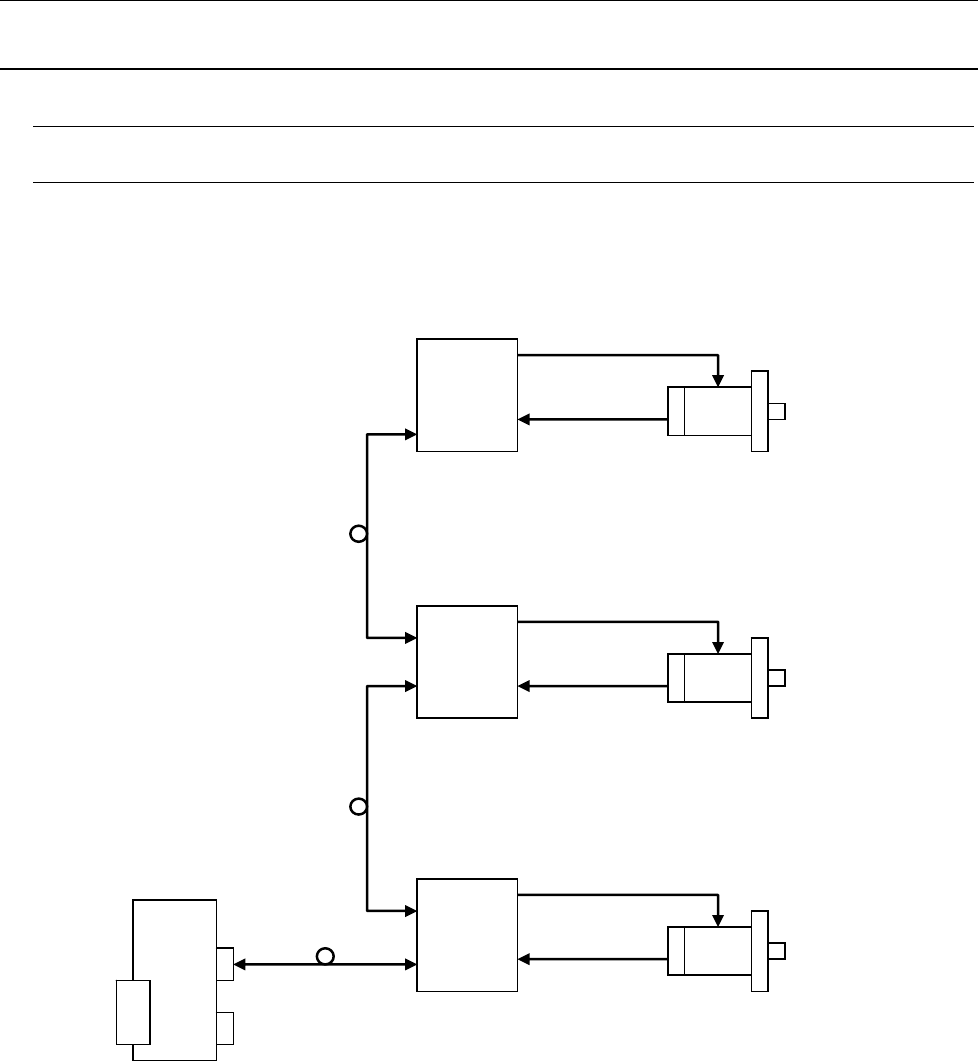
5-2-1 XY轴的控制方式
X、Y s轴均由 2 台电动机进行串联驱动,控制采用半闭环控制方式,进行元件贴装头的移动控制。
X 轴及 Y 轴的控制组成图如图 5-2-1。
UVW 相驱动输出
X 轴
放大器
图 5-2-1
各轴(XL、YL、YR)驱动器的控制,采用三菱运动控制系统,即 SSCNETⅢ,以光 50Mbps 的通信速
度进行 0.44ms 周期的电动机控制。
控制时,X 轴 Y 轴都利用半闭环控制驱动。
Y 轴驱动使用 YL 电动机、YR 电动机,电动机的控制以 YL 电动机为主动轴,以 YR 电动机为从动轴,
在同一的控制指令下进行工作。
位置运动控制板
CH1
CH2 CPCI
接口
编码器输出
(三菱串行)
SSCNETⅢ
光通信
SSCNETⅢ
光通信
SSCNETⅢ
光通信
UVW 相驱动输出
YL 轴
放大器
编码器输出
(三菱串行)
UVW 相驱动输出
YR 轴
放大器
编码器输出
(三菱串行)