JM-20_动作说明书.pdf - 第44页
Rev 1.0 动作说明书 3-31 3) 有时因元件的吸附状态, 被判定为跳起。 例如, 2125R 时, 元件下面和 Scan 高度的间隙为 0.15mm 时,检测为倾斜吸附状态,因而被退出。 激光 Scan高度 此时因为固定位置有问题,需要进行纠正。 由于芯片跳起检测 高度可以在各元件的元件数据中改变设定值,因而有些尺寸的元件也能够再倒向安 全侧。 〔 2125R 〕时 正常吸附 横向吸附 间隙中央 激光 Scan高度 上述元件尺…
Rev 1.0
动作说明书
3-30
系数 1.25 的理由如下
。
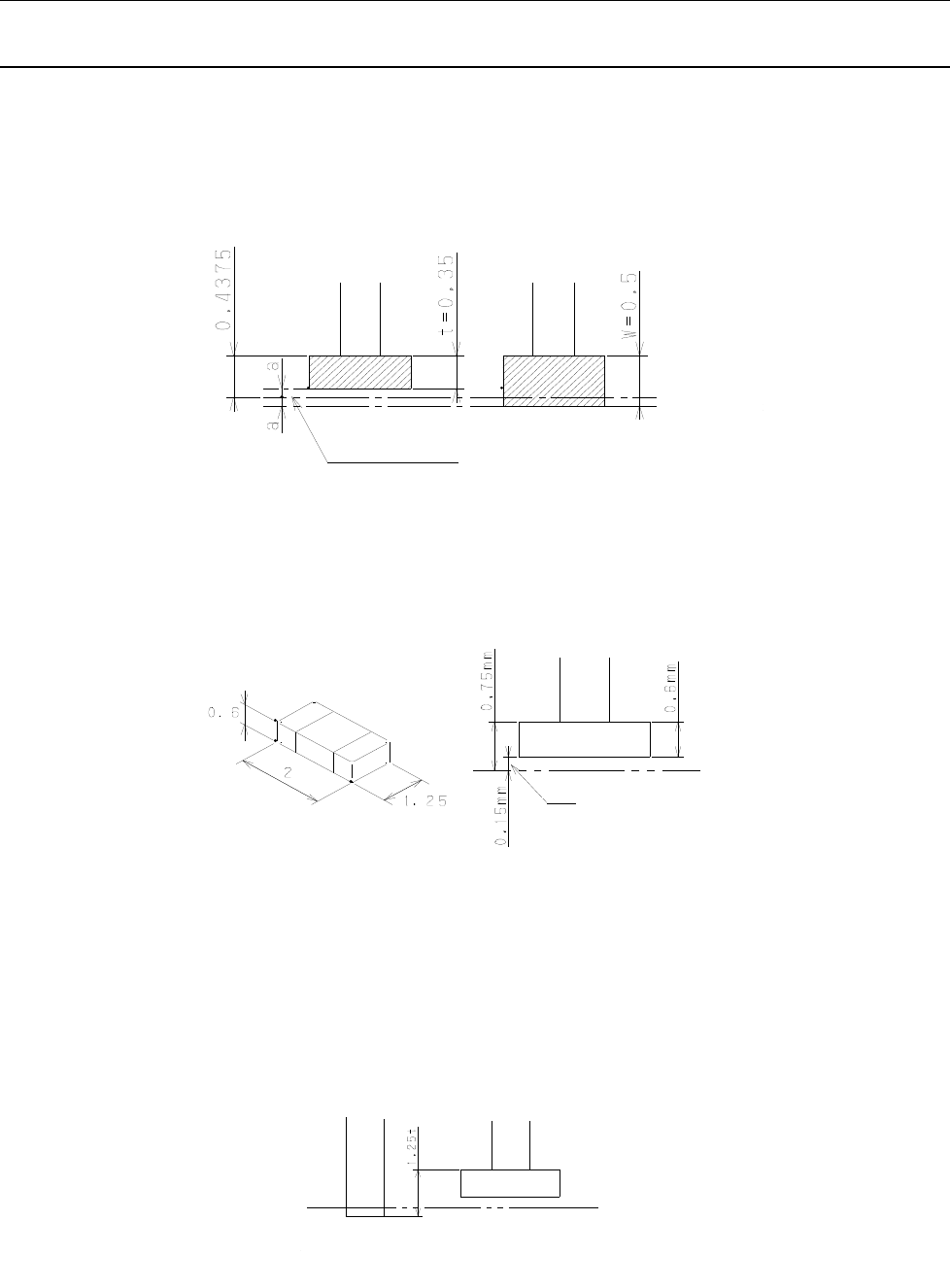
1005 电阻时,元件尺寸 t=0.35、W=0.5mm,检测横跳起吸附的高度定为下图风习的中央时,距离 1.25×
t 较近,因此为(0.35+0.5)/2≒1.25×0.35
。
正常吸附
横向吸附
激光
Scan高度
目标间隙的中央
1) 如果元件高度的输入值与实际尺寸不同时,虽然能正常吸附但是也被退出。
2125R 时,t=0.6mm,芯片跳起 Scan 高度为 0.6×1.25=0.75
。
激光
Scan高度
间隙
如果元件高度被错误地输入为 0.4mm 的话,Scan 高度为 0.5mm(0.4×1.25),虽然能正常虚浮,
但是也被判定为跳起,此时必须通过自动测量元件高度来输入真值。
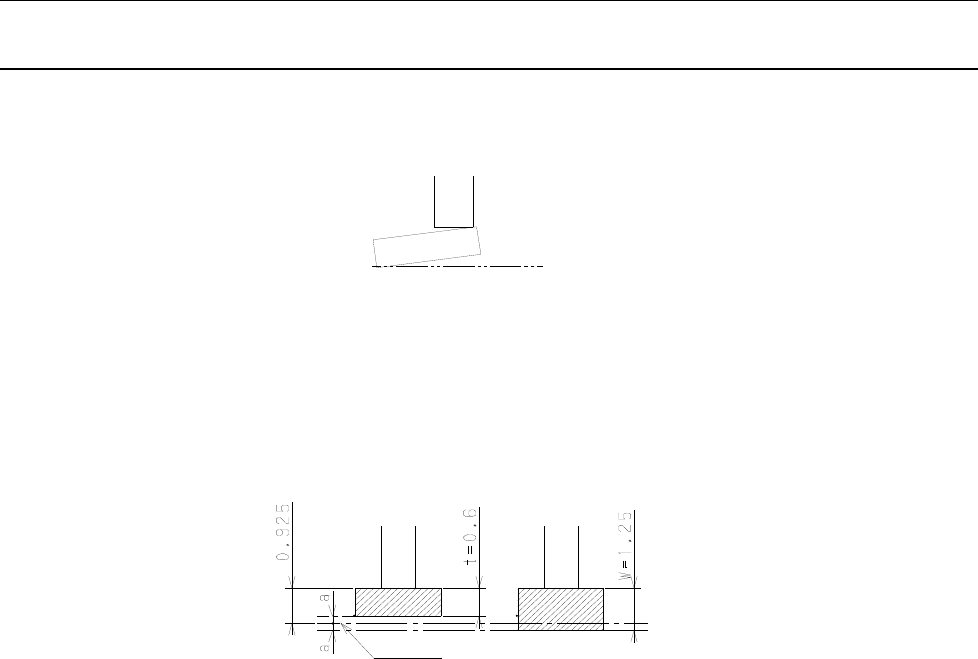
2) 吸嘴的激光高度不同时,虽然能正常吸附,但是也判定为跳起。
把吸嘴的激光高度(Set-up 数据)设定为比正常位置低的话,此 Scan 高度就检测为能正常吸附。
吸嘴的激光高度
低设定
1.25t吸嘴上升但
是也碰不到激光
激光
Scan高度
此时,在各贴装头取得了维修模式的激光高度,请重新用安装数据的吸嘴分配方法取得吸嘴高度数
据。
Rev 1.0
动作说明书
3-31
3) 有时因元件的吸附状态,被判定为跳起。例如,2125R 时,元件下面和 Scan 高度的间隙为 0.15mm
时,检测为倾斜吸附状态,因而被退出。
激光
Scan高度
此时因为固定位置有问题,需要进行纠正。
由于芯片跳起检测高度可以在各元件的元件数据中改变设定值,因而有些尺寸的元件也能够再倒向安
全侧。
〔2125R〕时
正常吸附
横向吸附
间隙中央
激光
Scan高度
上述元件尺寸计算的错误值是 1.25× t =0.75mm,如果激光对准正常吸附和横跳起吸附间隙的中央时,
则为
( t+W)/2=(0.6+1.25)/2=0.925mm。
因此,此元件,因吸附状态发生退出的话,把检测高度变更为 0.925 的话会有效果。
但是,( t+W)/2 的计算方法,并不能适用于所有的元件,请加以注意。
厚度( t )和宽度(W)尺寸相同的元件(1608C、1005C)时,( t+W)/2= t,因此虽然能正常吸附但
是有时也被退出。
1608C 时, t=0.8mm、W=0.8mm
芯片跳起检测高度为 H=(0.8+0.8)/2=0.8mm。
Rev 1.0
动作说明书
3-32
3-7 真空同步时间
3-7-1 元件类别的分类
部品種別〔0〕~〔49〕の分類
〔0〕 角チップ (1005以上) 〔11〕 PLCC(QFJ) 〔23〕 拡張リードコネクタ 〔35〕 日本TI Micro BGA
〔0〕 角チップ (0603) 〔12〕 TSOP 〔24〕 外形センタリング部品 〔36〕 DIMMコネクタ
〔1〕 メルフ 〔13〕 TSOP2 〔25〕 外形認識部品 〔37〕 トランス(左上切欠け)
〔2〕 アルミ電解コンデンサ 〔14〕 BQFP(バンパ付QFP) 〔26〕 その他コネクタ 〔38〕 トランス(右上切欠け)
〔3〕 ネットワーク抵抗 〔15〕 BGA(PBGA) 〔27〕 Jリードソケット 〔39〕 トランス(左下切欠け)
〔4〕 トリマ 〔16〕 CBGA 〔28〕 ガルウイングソケット 〔40〕 トランス(右下切欠け)
〔5〕 SOT 〔17〕 ヒートシンク付きSOP 〔29〕 バンパ付ソケット 〔41〕~〔48〕 Resarve
〔6〕 SOJ 〔18〕 FBGA(CSP) 〔30〕 その他 IC ソケット 〔49〕 その他部品
〔7〕 GaAsFET 〔19〕 その他IC部品 〔31〕 HIC(基板部品)
〔8〕 その他チップ部品 〔20〕 一方向リードコネクタ 〔32〕 エレメント部品
〔9〕 SOP 〔21〕 二方向リードコネクタ 〔33〕 エレメント部品
〔10〕 QFP 〔22〕 Zリードコネクタ 〔34〕 エレメント部品
インデックス 部品種別
0 [10][12]~[40]
1〔9〕〔11〕
2〔1〕~〔8〕
3 [0] 角チップ (1005以上)
4 [0] 角チップ (0603)
元件种类〔0〕~〔49〕的分类
方芯片(1005以上)
方芯片(1603)
柱形元件
铝电解电容器
网络电阻
有机膜可变电容器
其他芯片元件
BQFP(带防护QFP)
散热SOP
其他IC元件
双方向引脚连接器
单方向引脚连接器
Z引脚连接器
器件元件
器件元件
器件元件
HIC(基板元件)
其他IC插座
带防护插座
侧翼插座
J引脚插座
其他连接器
外形识别元件
外形中心元件
扩展引脚连接器 日本TI Micro BGA
DIMM连接器
变压器(左上欠缺)
其他元件
变压器(右上欠缺)
变压器(左下欠缺)
变压器(右下欠缺)
系数
元件类别
方芯片
方芯片
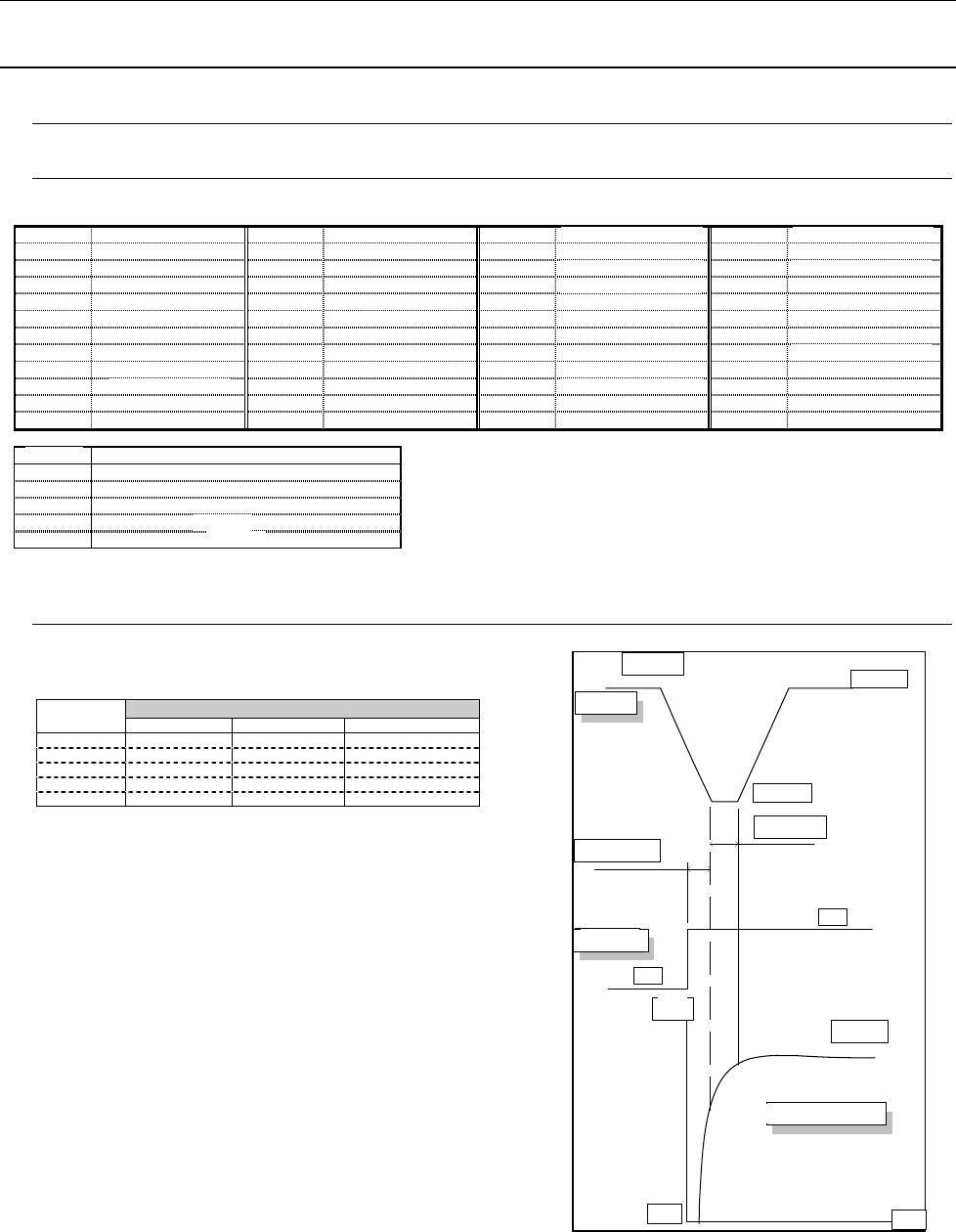
3-7-2 吸附时的真空同步时间
吸附元件时,Z 轴吸附下降完了之后,决定 VAC 电磁阀 ON 时间。
W.Pick.Vac.ON
Z軸上昇位置
Z軸上昇位置
Z軸下降位置
Z軸動作
nPickHold
VAC 電磁弁
ON
OFF
ノズル内真空圧の変化
時間
真空圧
真空到達圧
大気圧
Z轴上升位置
Z轴上升位置
Z轴动作
Z轴下降位置
VAC电磁阀
真空压
到达真空压
吸嘴内真空压的变化
大气压
时间
吸附时的机械控制参数的 Default 值
DEFAULT 值
系数
nPickVacOn nPickVacCorr nPickHold
0 0 0 50
1 0 0 30
2 20 5 10
3 20 12 10
4 20 15 15
(注) nPickVacOn、nPickVacCorr、nPickHold可以变更保存到机械控制参数。
〔吸附真空控制的机械控制参数〕
W.Pick.Vac.On:吸附Z轴下降完了反转Vac至电磁阀ON的时间。
nPickVacOn:吸附Z轴下降完了反转Vac至电磁阀ON的时间。(校正前)
nPickVacCorr:Vac电磁阀On时机的校正值。
nPickHold:吸附Z轴下降的时间根据元件尺寸变更吸附时间,以稳定吸附力。
元件尺寸越大,定时器指需要越长。
W.Pick.Vac.ON的计算式
W.Pick.Vac.On = nPickVacOn + nPickVacCorr MS参数的真空载荷未输入值。
W.Pick.Vac.On = wTime2 nPickHold + nPickVacCorr MS参数的真空载荷已输入值。
(注) W.Pick.Vac.On为负值时,Z轴下降完了之后同时真空电磁阀On。
正值时,吸附下降完了之后,反转真空电磁阀On。
(例) MS参数的真空载荷为输入值
系数3时,W.Pick.Vac.On = nPickVacOn + nPickVacCorr
= 20 12
= 8
贴装下降完了之后,反转8ms真空电磁阀On。
(例) MS参数的真空载荷已输入值
元件种类为系数0,wTime2 = 34时,W.Pick.Vac.On = wTime2 nPickHold + nPickVacCorr
= 34 50 + 0
= 16
W.Pick.Vac.On为负值,因此Z轴下降完了之后,同时真空电磁阀On。
各词汇的意义如下。
nPickVacOn : 「机械控制参数」「其他」「真空」「元件种类真空同步时间」「吸附」「真空开始同步时间」
nPickVacCorr : 「机械控制参数」「其他」「真空」「元件种类真空同步时间」「吸附」「真空开始修正值」
nPickHold : 「机械控制参数」「其他」「真空」「元件种类真空同步时间」「吸附」「真空稳定待机时间」
上述,吸附时的机械控制参数的 Default 值的表上有各指标的数值。
「自我校准」「真空校准」「生产使用值」「V.CAL」
wTime2 :「真空到达时间」 具有各贴装头的数值。