JM-20_动作说明书.pdf - 第22页
Rev 1.0 动作说明书 3-9 3-2-4 基板传送同步时间图 1 ) 支撑台上升速度:高速 生産開始位置へ 移動 2 ) 支撑台上升速度:中速 INセンサ WAIT センサ STO Pセ ンサ INモー タ センタモ ータ サポート プレ ートモ ータ 100ms センター ストッパ 外形基 準 (Xフ ゚ッシャ ) 100ms 100ms 動作時間 600ms 400ms 予備送り ( 距離:43.85mm) (20mm …
Rev 1.0
动作说明书
3-8
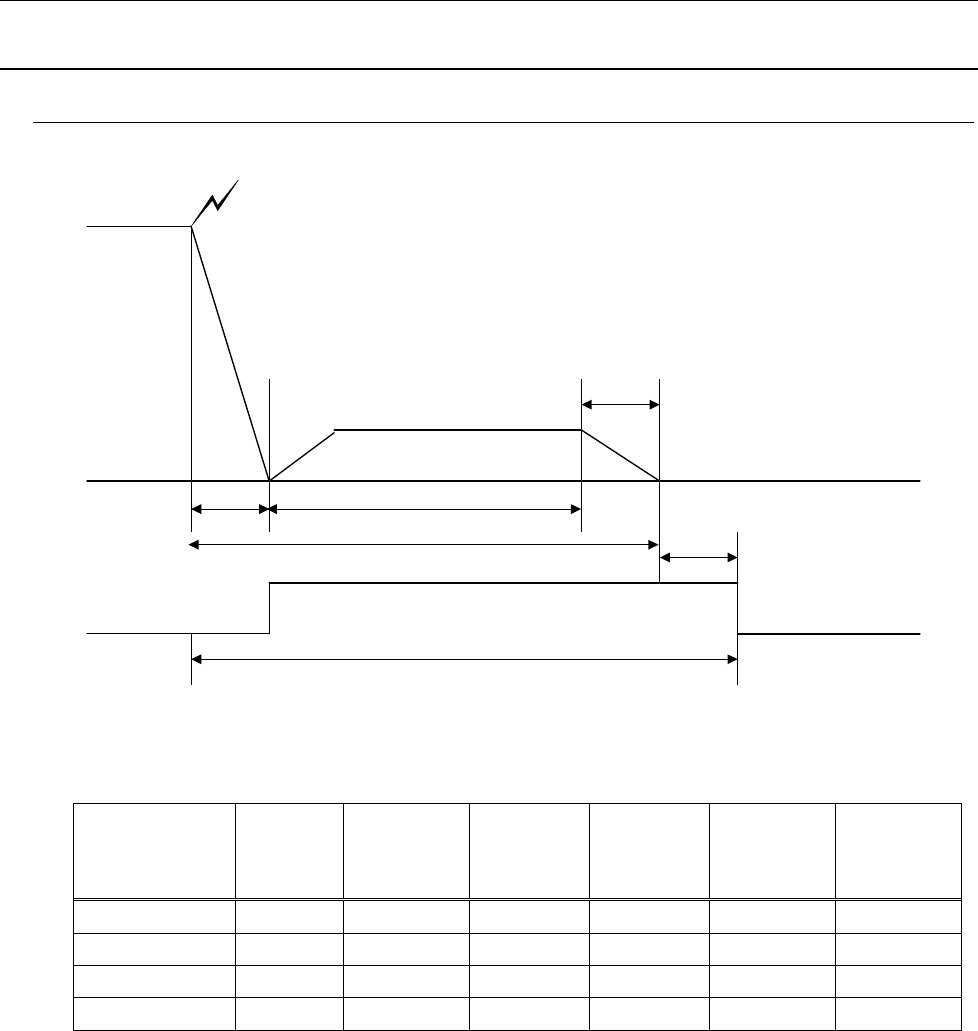
3-2-3 基板夹紧时的程序
基板夹紧时的程序如下所示。
STOP 传感器 ON 检测
减速距离 准备进给距离
准备进给速度
传送速度
准备进给减速时间
支撑台上升等待时间
减速时间
准备进给时间
总准备进给距离
支撑台上升时间
基板夹紧时间
根据支撑台上升速度,准备进给动作如下表所示。
支撑台
上升速度
传送
减速距离
(mm)
准备进给
时间 (ms)
准备进给
减速时间
(ms)
准备进给
最高速度
(mm/s)
准备进给
距离
(mm)
总准备进给
距离
(mm)
高速 20.0 400 100 56 23.85 43.85
中速 20.0 400 100 56 23.85 43.85
低速 20.0 1650 100 14 23.70 43.70
低速 2 20.0 1650 100 14 23.70 43.70
Rev 1.0
动作说明书
3-9
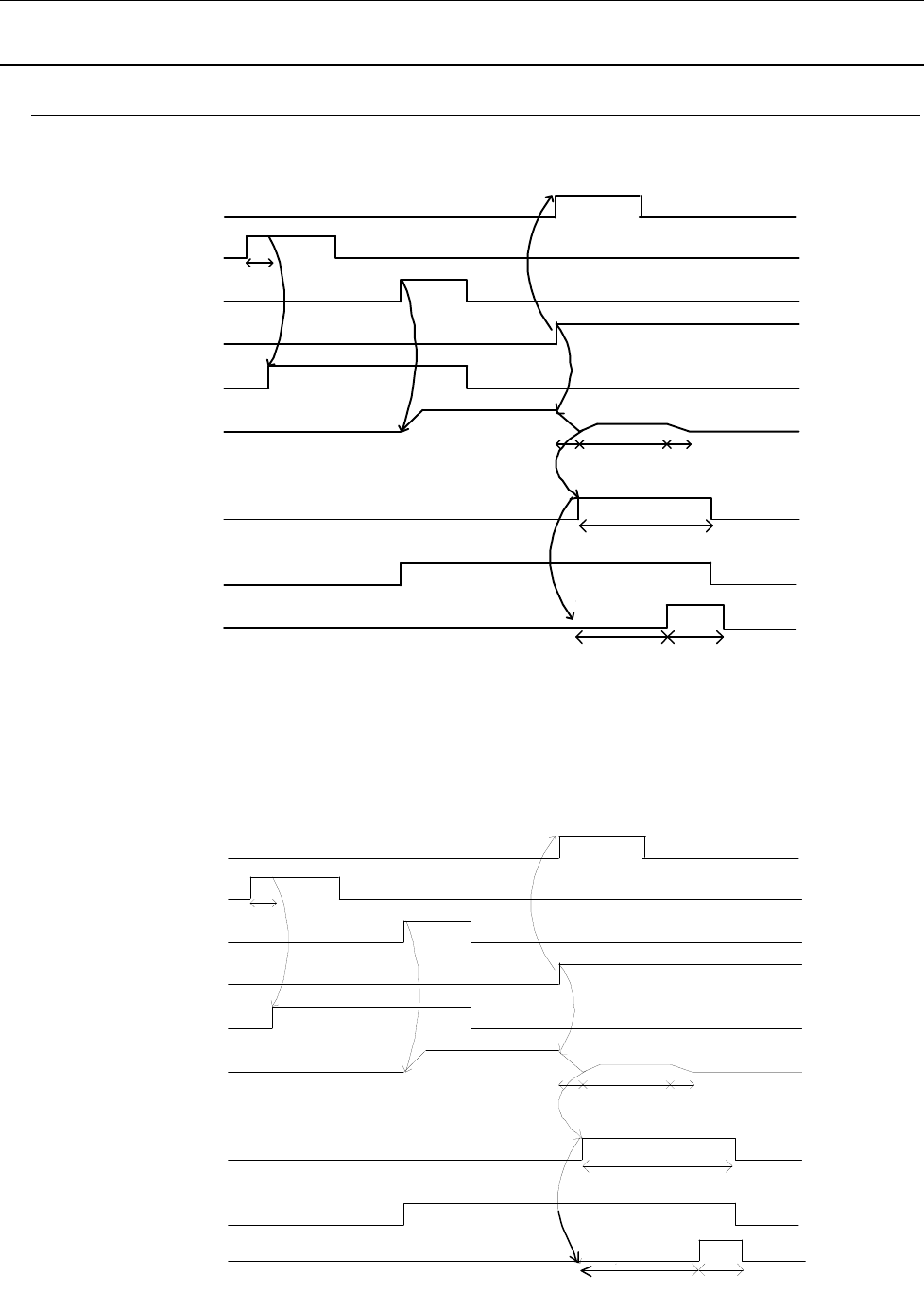
3-2-4 基板传送同步时间图
1) 支撑台上升速度:高速
生産開始位置へ移動
2) 支撑台上升速度:中速
INセンサ
WAITセンサ
STOPセンサ
INモータ
センタモータ
サポートプレートモータ
100ms
センターストッパ
外形基
準
(Xプッシャ
)
100ms 100ms
動作時間
600ms
400ms
予備送り ( 距離:43.85mm)
(20mm) (1.5mm + 19.3mm)
(2.8mm)
56mm/s
400mm/s
XY軸
向生产开始位置移动
XY 轴
IN 传感器
WAIT 传感器
STOP 传感器
IN 电动机
预备进给(距离 43.85mm)
中央电动机
支撑板电动机
动作时间
中央止动器
430ms
外形基準(Yプッシャ)
400ms
動作時間
200ms
动作时间
外形基准(Y 推杆)
生産開始位置へ移動
INセンサ
WAITセンサ
STOPセンサ
INモータ
センタモータ
サポートプレートモータ
100ms
センターストッパ
外形基準(Xプッシャ)
100ms 100ms
動作時間
960ms
400ms
XY軸
予備送り ( 距離:43.85mm)
(20mm) (1.5mm + 19.3mm)
(2.8mm)
56mm/s
400mm/s
外形基準(Yプッシャ)
400ms
430ms
動作時間
動作時間
200ms
360ms
预备进给(距离 43.85mm)
外形基准(Y 推杆)
中央止动器
支撑板电动机
动作时间
向生产开始位置移动
中央电动机
IN 电动机
STOP 传感器
WAIT 传感器
IN 传感器
XY 轴
动作时间
760ms
Rev 1.0
动作说明书
3-10
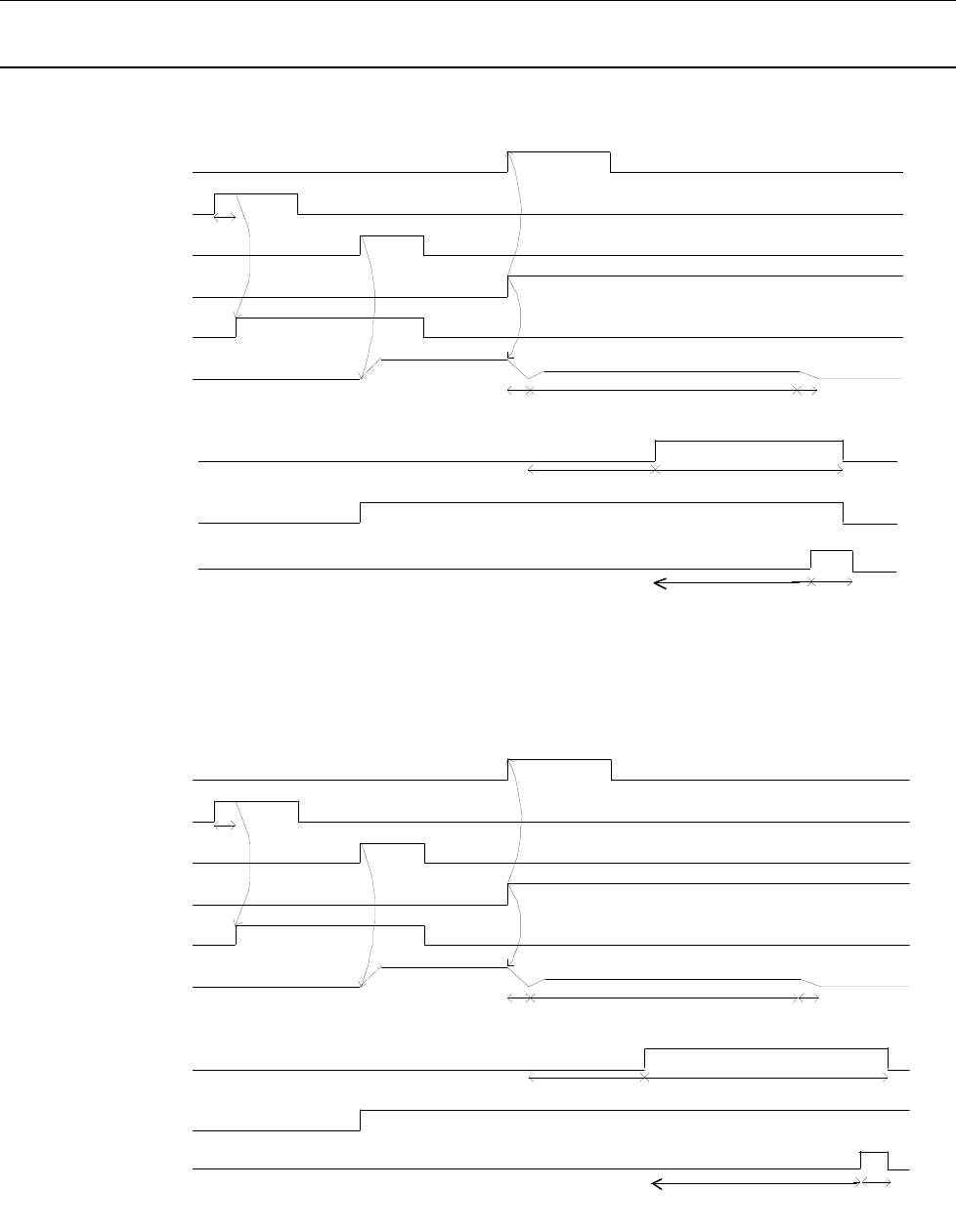
3) 支撑台上升速度:低速
生産開始位置へ移動
4) 支撑台上升速度:低速 2
INセンサ
WAITセンサ
STOPセンサ
INモータ
センターモータ
サポートプレートモータ
100ms
センターストッパー
100ms
100ms
動作時間
1080ms
1650ms
予備送り ( 距離 43.7mm)
XY軸
(0.7mm)
(0.1mm + 22.9mm)
770ms
(20mm)
14mm/s
400mm/s
外形基準(Yプッシャ)
480
ms
動作時間
430ms
動作時間
200ms
400ms
向生产开始位置移动
XY 轴
IN 传感器
WAIT 传感器
STOP 传感器
IN 电动机
预备进给(距离 43.7mm)
中央电动机
支撑板电动机
动作时间
中央止动器
外形基准(Y 推杆)
动作时间
880ms
生産開始位置へ移動
INセンサ
WAITセンサ
STOPセンサ
INモータ
センターモータ
サポートプレートモータ
100ms
センターストッパー
100ms
100ms
動作時間
2160ms
1650ms
予備送り ( 距離 43.7mm)
XY軸
(0.7mm)
(0.1mm + 22.9mm)
770ms
(20mm)
14mm/s
400mm/s
動作時間
1560ms
外形基準(Yプッシャ)
430ms
動作時間
200ms
400ms
预备进给(距离 43.7mm)
外形基准(Y 推杆)
中央止动器
支撑板电动机
动作时间
向生产开始位置移动
中央电动机
IN 电动机
STOP 传感器
WAIT 传感器
IN 传感器
XY 轴
动作时间
1960ms