JM-20_动作说明书.pdf - 第16页
Rev 1.0 动作说明书 3-3 < 各轴原点复归前的预备动作 > 轴 预备动作的内容 X , Y 如果在近点限位开关上,则以 jog 方式向离开近点限位开关的方向移动, 在近点限位开关变为 OFF 处停止 jog 。 Z 无特别的动作。 θ 当无条件地进行原点复归动作时, 如果 Z 相与原点复归开始位置离开过多, 则以爬行速度寻找 Z 相需要非常长的时间。进行的预备动作是,为了缩短 这一时间而以高速寻找 Z 相,使原点复…
Rev 1.0
动作说明书
3-2
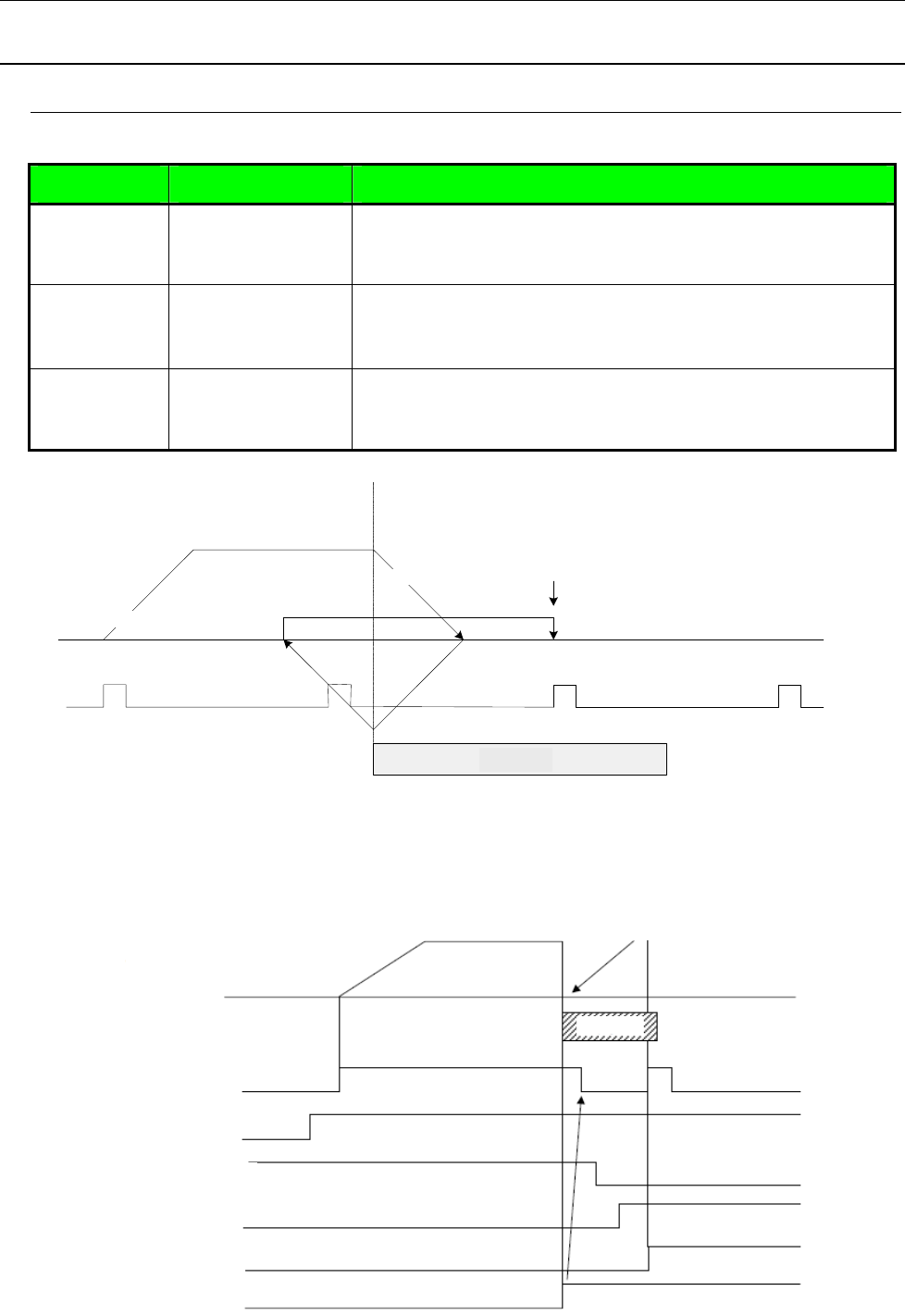
3-1-1-3 各轴各自的原点复归动作
<原点复归方式>
轴 原点复归方式 概述
X,Y 限位开关起点式原
点复归
在 DOG 开关前端开始减速,返回一次到 DOG 开关前端,再次
以爬行速度进行移动,以离 DOG 开关前端的第一个Z相信号作
为原点。
Z 接触式原点复归 使 Z 轴向上方旋转,接触到限动器。
然后当马达的发生扭矩达到设置好的扭矩阈值时使 Z 轴向下方
旋转,以第 1 个 Z 相为原点。
θ 比例式原点复归 采用与 XY 相同的比例式原点复归。由于 θ 轴没有近点限位开
关,所以与控制参数的限位开关逻辑相反,在始终处于检测到
近点限位开关的状态下进行原点复归。
近点限位开关
反转
原点
到限位开关减速
Z 相脉冲
限位开关起点式原点复归
起动
爬行速度
原点复归速度
接触式原点复归
限动器
原点
TL
C(扭矩限制工作中)
ZP(原点复归结束)
ZRN(原点复归方式)
JOG(JOG 运转方式)
TL(扭矩控制)
ST(运转启动)
马达速度
Rev 1.0
动作说明书
3-3
<各轴原点复归前的预备动作>
轴 预备动作的内容
X,Y 如果在近点限位开关上,则以 jog 方式向离开近点限位开关的方向移动,
在近点限位开关变为 OFF 处停止 jog。
Z 无特别的动作。
θ 当无条件地进行原点复归动作时,如果 Z 相与原点复归开始位置离开过多,
则以爬行速度寻找 Z 相需要非常长的时间。进行的预备动作是,为了缩短
这一时间而以高速寻找 Z 相,使原点复归开始点位于 Z 相附近。
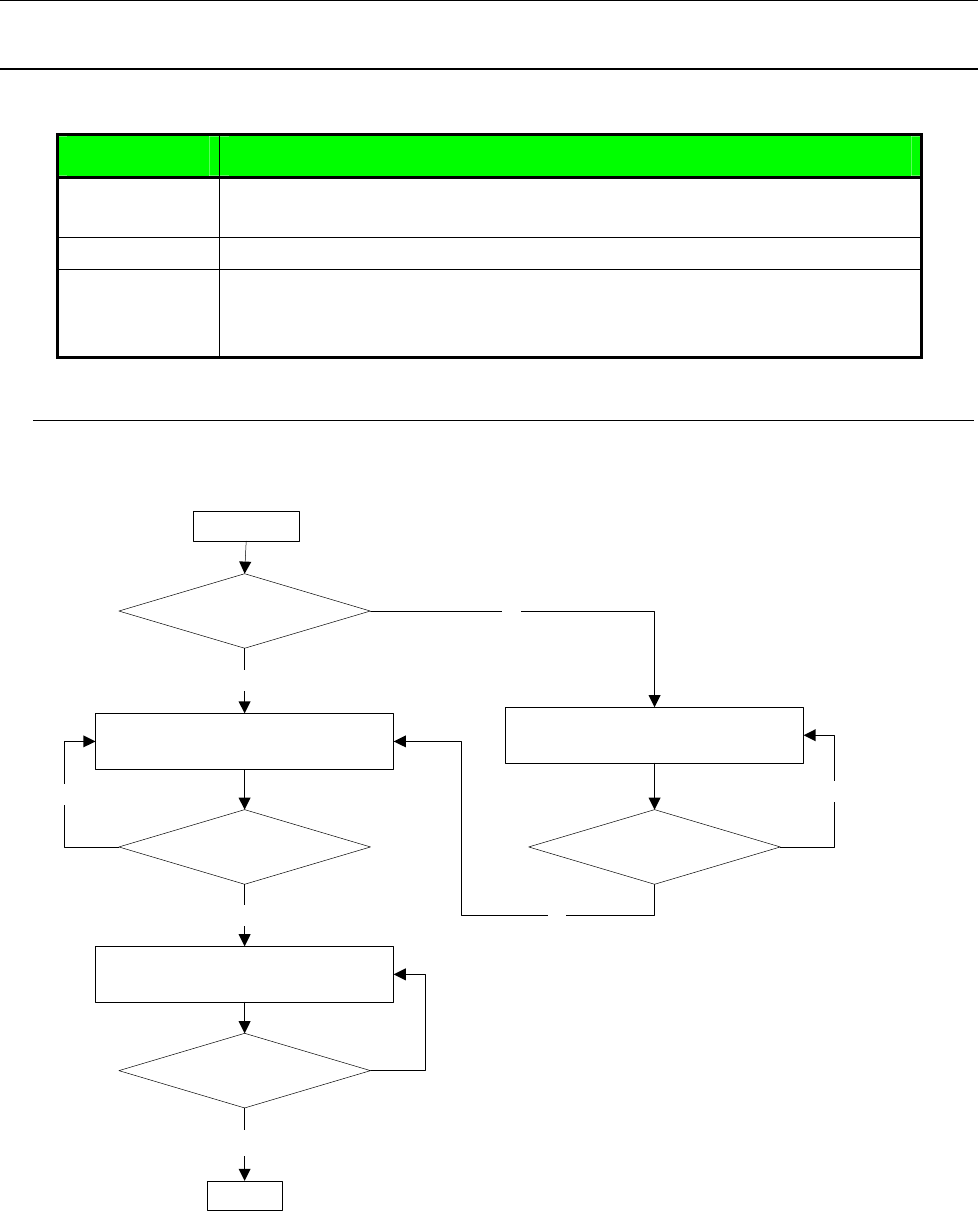
3-1-2 支撑台原点复归动作
支撑台原点复归的过程如下所示。
向机台上方凸凹移动
(传感器Off方向)
向机台下方向Step移动
(传感器On方向)
on
START
原点传感器
原点传感器ON
检测零相
END
off
on
on
off
殊霞
向机台下方向凸凹移动
(传感器On方向)
原点传感器ON
off
检测
Rev 1.0
动作说明书
3-4
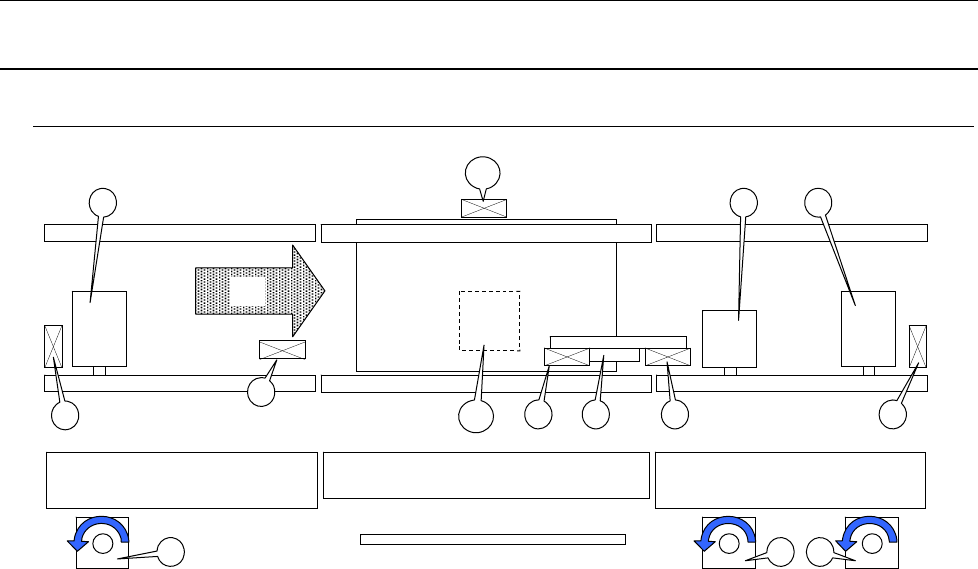
3-2 基板传送
A
11
7 89
5
6
10
4
2
2 3
3
1
1
1.
IN 马达(步进马达)
2. CENTER 马达(步进马达)
3. OUT 马达(步进马达)
4. IN 传感器
5. WAIT 传感器
6. STOP 传感器
7. C・OUT 传感器
8. OUT 传感器
9. 止动器
10. 支撑台电动机(步进马达)
1
1. 支撑台原点传感器