JM-20_动作说明书.pdf - 第82页
Rev 1.0 动作说明书 5-9 5-2-3 基板传送部的控制方式 ① 传送中央电动机、传送 L 电动机、传送 R 电动机 进行基板传送的传送中央电动机、传送 L 电动机、传送 R 电动机,是通过使用部进电动机进行定 速控制。 ② 支撑台马达 进行支撑台的上下移动的 BU 马达,用步进马达和变换器进行控制定位。 ③ 基板传送宽度自动调整马达 传送基板时自动进行调整的基板传送宽度自动调整马达,用步进马达和变换器进行控制定位。
Rev 1.0
动作说明书
5-8
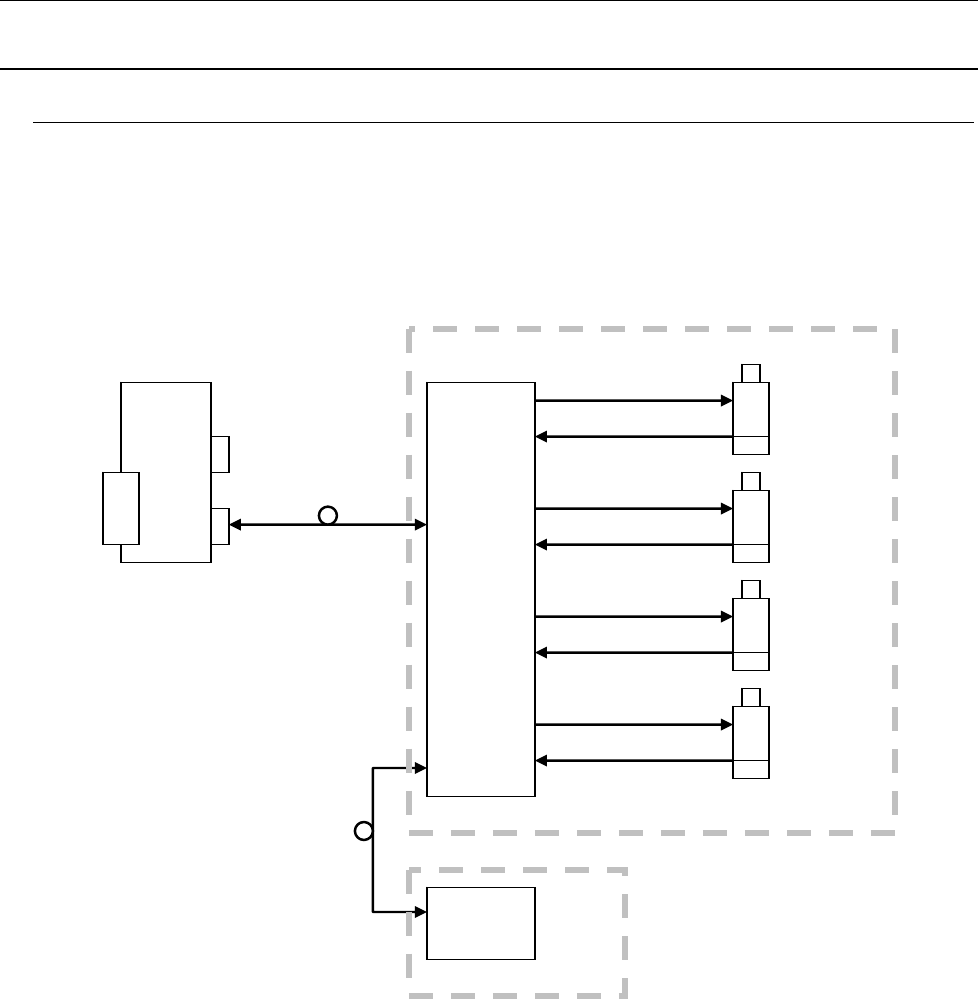
5-2-2 Z,θ轴的控制方式
Z、θ 轴的电动机控制采用半闭环控制方式,在 Z 轴是进行元件的贴装及吸取等上下动作,在 θ 轴是
进行元件激光识别及角度校正等旋转动作。
Z 轴是每一吸嘴独立控制,但 θ 轴是对 3 个吸嘴用 1 个电动机控制,共计用 2 个电动机以 3 轴同时驱
动方式进行控制。
Z 轴及 θ 轴的控制组成图如图 5-2-2。
图 5-2-2
各 4 轴 1 体驱动器的控制,采用三菱运动控制系统,即 SSCNETⅢ,以光 50Mbps 的通信速度进行 0.44ms
周期的电机控制。
4 轴 1 体式驱动器放大器(MR-MD200)是每 1 个放大器连接 1 台 θ 电动机、3 台 Z 电动机。这一组
合实装 2 块 4 轴一体式 AC 放大器电路板,驱动 8 轴。
位置运动控制板
UVW 相驱动输出
CH1
CH2
CPCI
接口
SSCNETⅢ
光通信
SSCNETⅢ
光通信
θ 电动机
4 轴 1 体
SERVO
AMP
UVW 相驱动输出
编码器输出
(三菱串行)
Z 电动机
UVW 相驱动输出
编码器输出
(三菱串行)
Z 电动机
UVW 相驱动输出
编码器输出
(三菱串行)
Z 电动机
编码器输出
(三菱串行)
*A
4 轴 1 体
SERVO
AMP
*A

Rev 1.0
动作说明书
5-9
5-2-3 基板传送部的控制方式
① 传送中央电动机、传送 L 电动机、传送 R 电动机
进行基板传送的传送中央电动机、传送 L 电动机、传送 R 电动机,是通过使用部进电动机进行定
速控制。
② 支撑台马达
进行支撑台的上下移动的 BU 马达,用步进马达和变换器进行控制定位。
③ 基板传送宽度自动调整马达
传送基板时自动进行调整的基板传送宽度自动调整马达,用步进马达和变换器进行控制定位。
Rev 1.0
动作说明书
6-1
6 故障处理
6-1 元件贴装
发生元件贴装偏斜的现象,分位 XY 偏斜、θ偏斜、XYθ偏斜,原因主要如下。
1. 粘和剂或焊锡膏的原因
2. 贴装程序输入的问题
3. 基板传送的基板钳夹状态
4. 贴装头的问题
5. 贴装时的真空、空气压力问题
6. XY轴的问题
7. MS参数输入上的问题
(1) 粘和剂分配器或软焊锡的原因
这是粘和剂和焊锡膏的问题、两面胶带上应能正常贴装为条件。
现象 原因 处理
由于粘和剂使贴装
XY、θ偏斜。
(特别是销行元件
2125、3216 电容器和
电阻、SOT)
粘和剂时主要发生θ偏斜、涂布量、涂布偏斜
造成。涂布量时,特别是 2125、3216 的电容
器和电阻、SOT 受涂布量的影响。电容器时,
元件两端元件跳起,涂布量少的话,粘和剂不
能粘到元件,涂布量过多则固定到 1 点。
SOT 时也是一样,元件跳起造成,电阻因容
易滚动,对涂布量非常敏感。
但是,总的来说,粘和剂的涂布量多,贴装比
较稳定。
确认粘和剂的涂布的基板,检
查是否涂布偏斜,对于涂布
量,确认贴装元件的基板,粘
和剂是否正常地粘着元件。
如果有涂布位置和涂布量的
问题,请修正点胶机的零件。
粘和剂贴装时发生
XY、θ偏斜。
(特别是中型元件的
铝电解电容器,钽电
容器,电阻等)
中型元件的铝电解电容器,钽电容器,电阻等
有高度的元件容易发生滚动,同时还和基板的
厚度和基板的尺寸有关,贴装时,基板的一点
Z 上升力,就会发生偏斜。这种偏斜以θ偏斜
为较多。
涂布量多效果好,但是应在贴
片机侧贴装基板下面设置支
撑销,控制基板的翘起,如果
仍不能改善时,把贴装后的 Z
上升速度变为中速和低速。
焊锡膏在贴装时发生
XY、θ偏斜。
(全部元件发生)
焊锡膏会影响印刷偏斜和贴装。焊锡膏基本上
没有粘结力。但是焊锡印刷后放置时间和粘度
有管。同时焊锡的种类和放置温度,湿度的环
境也有关。
确认贴装钳焊锡是否干燥。
焊锡膏的原因发生贴
装时 XY、θ偏斜。
(特别是中型元件的
铝电解电容器,钽电
容器,电阻)
与焊锡的干燥程度有关,此时与上述粘和剂一
样也与基板厚度,基板尺寸有关,贴装时基板
的一点上升力,就发生偏斜和跳起。
应在贴片机侧贴装基板下面
设置支撑销,控制基板的翘
起,如果仍不能改善时,把贴
装后的 Z 上升速度变为中速
和低速。