JM-20_动作说明书.pdf - 第59页
Rev 1.0 动作说明书 3-46 3-11-1 部元件图像识别,贴装动作时间曲线 認識位置へ移動 照明OFF 認識画像キャプチャ 画像認識処理 搭載位置へ移動 補正移動と 搭載 次の 吸着位置へ移動 軸制御 エアシリンダ ー ON 画像入力 制御 画像認識 照明ON エアシリンダー 動作完了 照明 向识别位置移动 轴控制 照明ON 气缸 气缸动作完了 图像输入控制 图像识别 图像识别处理 识别图像 照明OFF 向贴装位置移动 修正移…
Rev 1.0
动作说明书
3-45
3-11 VCS识别动作
下页表示元件图像识别、贴装的基本时间曲线图。轴的速度、加减速度、移动距离等,与失家的时间
有若干差别,但是基本上以此时间曲线图动作。图像识别用 CPU 合贴片机动作控制 CPU 分离,因此,
图像识别处理不妨碍贴片机动作控制的实时性,保证高速可靠的生产动作。
高分辨率 VCS 可作为出厂时的选项进行选择,0.25mm 以上球间距的 FBGA(CSP、LGA)能够在视野
□27mm 中成批识别,故以前作为 3 个种类中选一的选择性 VCS 摄像机变成了 1 个种类,以 1 台贴片
机就可以应对任何图像识别元件。
JM-20 VCS(27mm 视野摄像机)规格
名称 视野 分辨率 最小球间隔 最小球直径
高分辨率 VCS H/V:28.50/27.00[mm] 51.3[μm] 0.5[mm] 0.20[mm]
数字为设计值。视野合分辨能于实际机器不完全一致。
最小球间隔/直径为计算时的适用尺寸,实际元件动作未确认。
JM-20 VCS(54mm 视野摄像机)规格
名称 视野 分辨率 最小球间隔 最小球直径
标准 VCS H/V:57.50/54.00[mm] 109.4[μm] 1.00[mm] 0.50[mm]
数字为设计值。视野合分辨能于实际机器不完全一致。
Rev 1.0
动作说明书
3-46
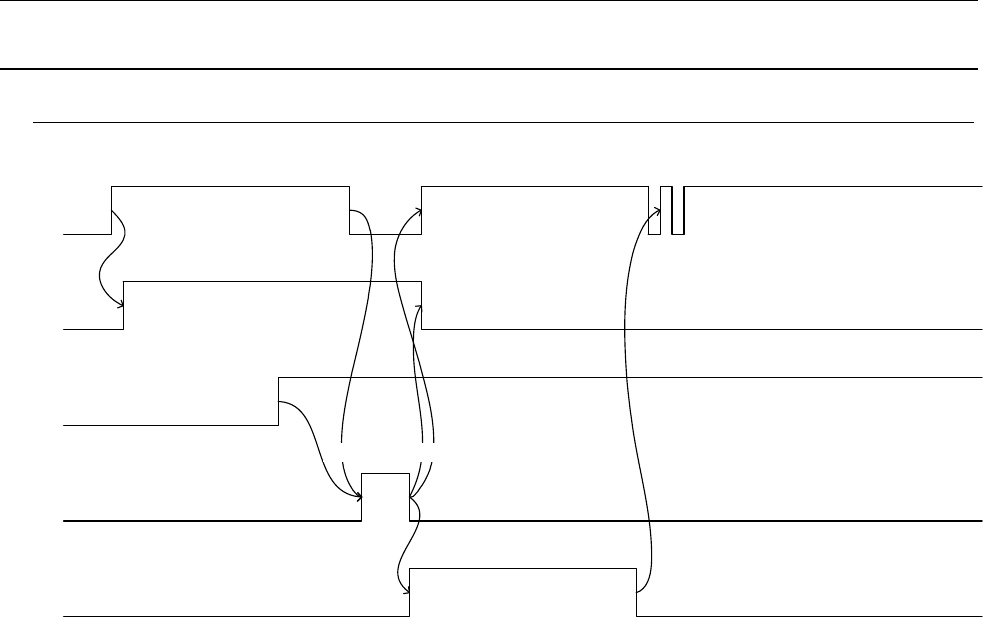
3-11-1 部元件图像识别,贴装动作时间曲线
認識位置へ移動
照明OFF
認識画像キャプチャ
画像認識処理
搭載位置へ移動 補正移動と搭載 次の吸着位置へ移動
軸制御
エアシリンダー
ON
画像入力
制御
画像認識
照明ON
エアシリンダー
動作完了
照明
向识别位置移动
轴控制
照明ON
气缸
气缸动作完了
图像输入控制
图像识别
图像识别处理
识别图像
照明OFF
向贴装位置移动 修正移动和贴装 向下一吸附位置移动
元件吸附动作结束后,向元件识别位置(VCS 摄像机位置)移动。(照明亮灯)
到达元件识别位置的同时,图像开始扫描动作。
图像扫描动作结束后,开始向元件贴装位置移动。(照明灭灯)
根据图像识别结果,修正目标贴装坐标,进行贴装。
贴装结束后,开始移动到下一元件的吸附位置。
标准 VCS→高分辨率 VCS、高分辨率 VCS→标准 VCS 的变换通过气缸的 ON/OFF 来控制。
元件吸附后向确认位置(VCS 位置)开始 XY 移动,同时照明亮灯,开始变换。
识别位置(VCS 位置)XY 移动完了之后,VCS 的变换完了,开始图像扫描。
气缸的动作时间,从 MTC 轴开始向标准 VCS 或高分辨率 VCS 移动的 XY 移动时间基本相等。

Rev 1.0
动作说明书
3-47
3-11-2 照明动作说明
JX-200 系列元件用照明,用 D/A 变换器进行电流控制。机器具有各个照明的调整值,约 1/1000 的分
辨率来调整所有的机械照明亮度。另外,各元件的照明亮度的机器调整值,可以在 20~200%的范围内
由拥护进行设定。
JX-200 系列元件的照明大致可分未下列 3 种。
1. 反射照明(标准照明)
2. 侧照明(BGA、FBGA 用照明)
反射照明是,同轴照明(半反射照明)、下侧照明、红侧照明(上下段)的 3 种照明构成的红色照明。
另外,反射照明除 BGA(FBGA)元件以外的元件照明,从 3 方向照明,因此镜面引脚、焊锡电镀引脚
等很难检测的元件,也不受引脚的材料、加工、涂装等影响,可以稳定地拍摄元件。
侧照明是由蓝侧照明(上段、下段、下段 2)或红侧照明(上下段)构成的照明。重新设计了 VCS 照明
大小和配置,气缸的抽气动作从 KE2060 不需要。蓝侧照明和红侧照明不能同时亮灯。
侧照明的取消值是蓝侧照明。
基板型 BGA(FBGA)识别焊锡球的照明。气缸动作废止,因此与 KE2020/40 比较,VCS 照明和元件
的相碰解除,对大型元件的分割识别的外形尺寸限制没有了。
红侧照明,基板型 BGA(FBGA)的存取使用的蓝色材料,在蓝侧照明时存取亮光时使用。