JM-20_动作说明书.pdf - 第54页
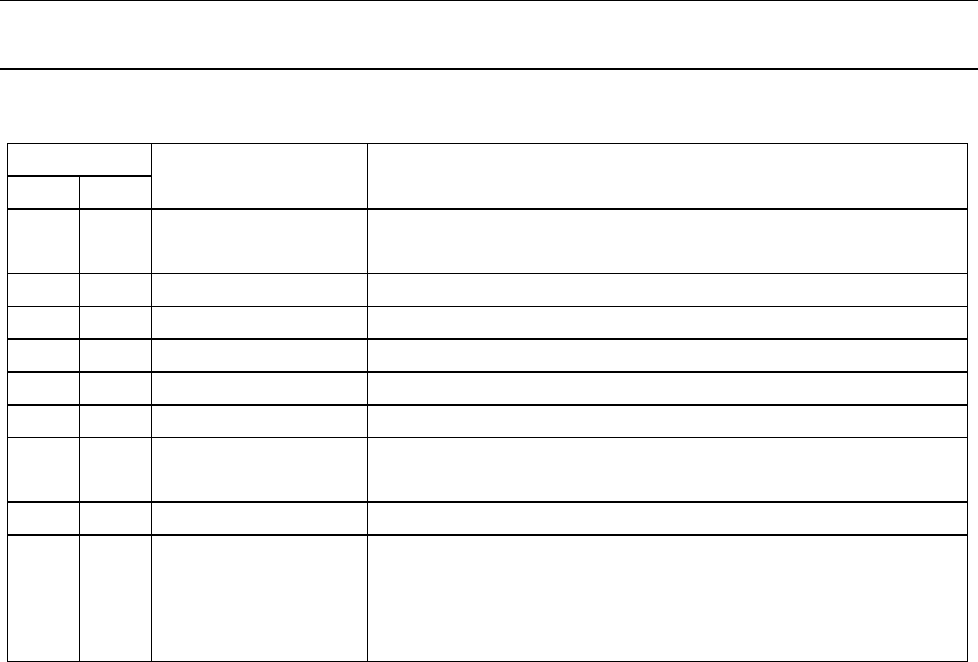
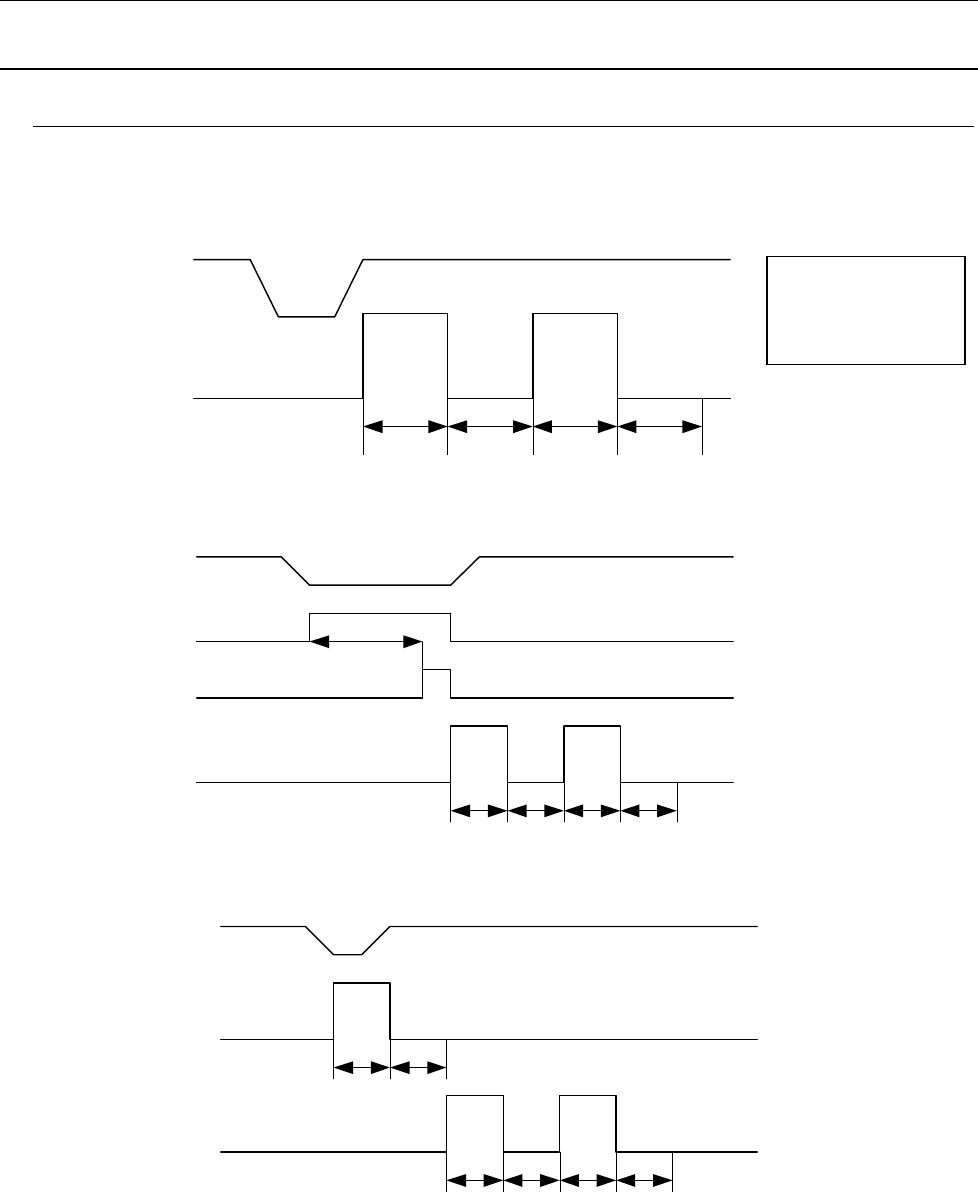
Rev 1.0 动作说明书 3-41 3-10 供料器的驱动 同步曲线图 标准的供料传送 ( 仅传送 ) 上升 下降 A : byOnTime 需要保持吸附样子时 需要推顶元件时 (44 mm) B : byOffTime C : by Pickhold B AA B Z 供料器传送用扳手 Z 下降 ABAB C 剥离等待时间 真空检查 供料器传送用扳手 Z 下降 AB ABAB 推顶扳手 供料器传送推顶
Rev 1.0
动作说明书
3-40
表 LA的情况代码一览表(续)
代码
10 进 16进
名称 说明
106 6AH ERROR_LEVEL_
TOO_LOW
发生了未定义的错误。
107 6BH NO_INIT 与传感器的通信尚未建立,在此状态下执行了指令。
108 6CH BEGIN_FAIL 非同步指令的开始失败。
109 6DH UNFINISHED 经过一定时间后仍未从传感器返回 SWEEP 计测结果。
110 6EH LAS_ACTIVATION 执行 SWEEP 计测中间又执行了其他指令。
111 6FH SETUP_ACTIVE_FAIL 固件升级开始失败。
112 70H NOT_ARMED 在非 SWEEP 计测状态时接收到中断指令。
※ 通常不会发生。
113 71H STATUS_ERROR 从传感器发生了未定义的错误。
114 72H LNC_ENCODER_ERR 发生了编码器错误。原因有以下几种。
(1) 编码器电缆线断线、编码器接插器接触不良
(2) 因输入非法的编码器信号而导致解码错误
(3) 传感器与贴片机的 θ 未同步(不在同一角度)
Rev 1.0
动作说明书
3-41
3-10 供料器的驱动
同步曲线图
标准的供料传送(仅传送)
上升
下降
A:byOnTime
需要保持吸附样子时
需要推顶元件时(44
mm)
B:byOffTime
C:by
Pickhold
BAAB
Z
供料器传送用扳手
Z下降
ABAB
C
剥离等待时间
真空检查
供料器传送用扳手
Z下降
AB
ABAB
推顶扳手
供料器传送推顶
Rev 1.0
动作说明书
3-42
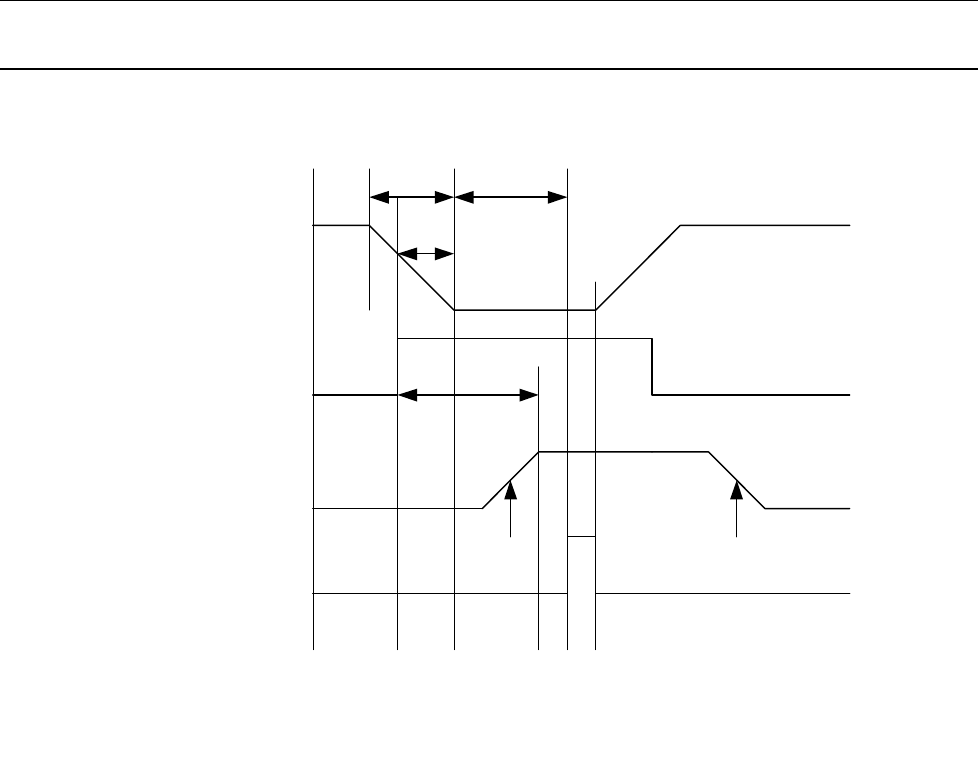
32 mm 纸粘合式带式供料器
(待ち時間)
74
40
5~10
80
①②
UP
DOW
N
軸
UP
DOWN
し
ダ
バキュ ク
単位:msec
①テープ剥し動作時間
②部品送り動作時間
Z
押し出
引き込み
シリン
ームチェッ
② 元件传送动作时间
单位:msec
① 带剥离动作时间
Z轴
压出
拉进
气缸
真空检测
(待机时间)