JM-20_动作说明书.pdf - 第49页
Rev 1.0 动作说明书 3-36 3-8 激光识别动作 3-8-1 LNC120 ( 1 ) SWEEP 测定时的参数设定 使用 SWEEP 指令时,需要预先指定决定以下的测定动作的参数。 ① 吸附角度( dRz Nominal ) 对元件被吸附的角度( -180°≦dRz Nominal < 180° )进行指定。在贴片机的贴装动作中, 是使贴装头的 θ 轴转到吸附角度再吸取元件的,所以该值始终指定为 0 。 ② 元件形状( Sh…
Rev 1.0
动作说明书
3-35
3-7-5 向废弃箱废弃元件时的真空同步时间
采用现行的废弃箱时,由于废弃时的鼓风,已发现元件高速落下、在箱底反弹向外飞出的现象。尝
试过通过改良废弃箱的形状来解决,但未得到充分改善,这就需要同时采取改变真空同步时间的对
策,因而必须对废弃箱和其他废弃动作(托盘返回、IC 回收带)的同步时间进行区别控制。
向废弃箱废弃时的机械控制参数的 Default 值
(注) nTrashBoxVacOff、nTrashBoxVacCorr、nTrashBoxBlowOn、nTrashBoxBlowTime、
nTrashBoxHold 可以变更保存到机械控制参数。
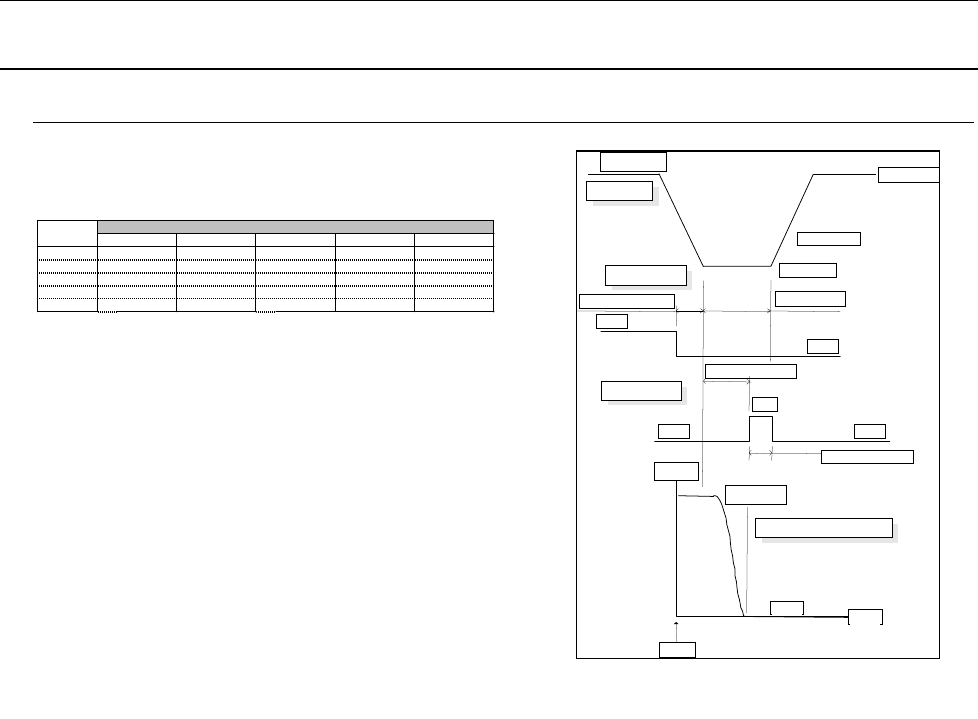
〔废弃真空控制的机械控制参数〕
W.TrashBox.Vac.Off:废弃 Z 轴下降完了反转 Vac 至电磁阀 Off 的时间。
nTrashBox.Vac.Off:废弃 Z 轴下降完了反转 Vac 至电磁阀 Off 的时间。(校正前)
nTrashBoxVacCorr:Vac 电磁阀断开(Off)时机的校正值。
nTrashBoxBlowOn:废弃 Z 轴下降完了反转上升 Blow 至电磁阀 On 的时间。
nTrashBoxBlowTime:Blow 电磁阀 On 时间。
nTrashBoxHold:废弃 Z 轴下降的时间是 Vac 的残压切断的等待时间。
元件尺寸越大,定时器指需要越长。
W.TrashBox.Vac.Off 的计算式
W.TrashBox.Vac.Off = nTrashBoxVacOff + nTrashBoxVacCorr MS 参数的真空载荷未输入值。
W.TrashBox.Vac.Of f= wTime6 nTrashBoxHold + nTrashBoxVacCorr MS 参数的真空载荷已输入值。
入
力
力済
nTrashBoxBlowOn
VAC 電磁弁
ON
ノズル内真空圧の変化
W.TrashBox.Vac.Off
OFF
Z軸上昇位置
Z軸上昇位置
Z軸下降位置
Z軸
nTrashBoxHold
Blow 電磁弁
nTrashBoxBlowTime
ON
OFFOFF
時間
真空圧
真空到達圧
大気圧
VavOff
时间
大气压
真空压
真空到达压
吸嘴内真空压的变化
VAC 电磁阀
Blow 电磁阀
Z 轴上升位置
Z轴
Z 轴上升位置
Z 轴下降位置
Z 轴下降位置
DEFAULT値
インデックス
nTrashBoxVacOff nTrashBoxVacCorr nTrashBoxBlowOn nTrashBoxBlowTime
nTrashBoxHold
0 50 0 -126 10 136
1 50 0 -126 10 136
2 50 0 -126 10 136
3 50 0 -126 15 141
4 50 0 -126 15 141
系数
(注) W.TrashBox.Vac.Off 为负值时,Z 轴下降完了之后同时真空电磁阀 Off。
正值时,吸附下降完了之后,反转真空电磁阀 Off。
(例) MS 参数的真空载荷为输入值
系数 3 时,W.TrashBox.Vac.Off = nTrashBoxVacOff + nTrashBoxVacCorr
= 50+0
= 50
废弃下降完了之后,反转真空电磁阀 Off。
(例) MS 参数的真空载荷已输入值
元件种类为系数 0,wTime6 = 27 时,w.TrashBox.Vac.Off = wTime6 + nTrashBoxHold + nTrashBoxVacCorr
= 27136+0
= 109
废弃下降结束后等待 109ms,断开真空电磁阀。
各词语的意义如下。
「机械控制参数」「其他」「真空」「元件种类真空同步时间」「元件废弃(废弃箱)」
nTrashVacOff :「真空停止同步时间」
nTrashVacCorr :「真空停止修正值」
nTrashBlowOn :「吹风开始时间」
nTrashVacCorr :「吹风持续时间」
nTrashHold :「真空切断等待时间」
上述在废弃时的机械控制参数 Default 值的表中有各指标值。
「自我校准」「真空校准」「生产使用值」「V.CAL」
wTime6 :「真空破坏时间」
有各贴装头的值。
Rev 1.0
动作说明书
3-36
3-8 激光识别动作
3-8-1 LNC120
(1) SWEEP 测定时的参数设定
使用 SWEEP 指令时,需要预先指定决定以下的测定动作的参数。
① 吸附角度(dRz Nominal)
对元件被吸附的角度(-180°≦dRz Nominal<180°)进行指定。在贴片机的贴装动作中,
是使贴装头的 θ 轴转到吸附角度再吸取元件的,所以该值始终指定为 0。
② 元件形状(Shape Template)
对根据收集到的数据计算位置偏移、角度偏移、元件尺寸的方法(算法)进行指定。
现在所使用的元件形状
元件形状 动 作
矩形 无切角、接近矩形形状的元件指定这种元件形状。
多角形 即便是有 1 个切角的元件,或者是 QFP 等激光测定位置上有引脚的元件,指定
这种元件形状。
圆筒 根据测定数据计算位置偏移、尺寸。角度偏移不计算。
无设置 从吸取姿势开始旋转,旋转量为贴片角度,再贴片。
③ 窗口尺寸(Sweep Radius)
以距吸嘴旋转中心的大小来指定检测元件的窗口尺寸。
LNC120 根据所测定的元件尺寸来改变窗口尺寸。
测定对角线长 15mm 以下的元件时,指定为 7.5mm。由于实际上存在着元件的吸附位置偏移,
所以加上几毫米的余量。
向 LNC120 发送 SWEEP 参数设定指令,即可设定各参数。
Rev 1.0
动作说明书
3-37
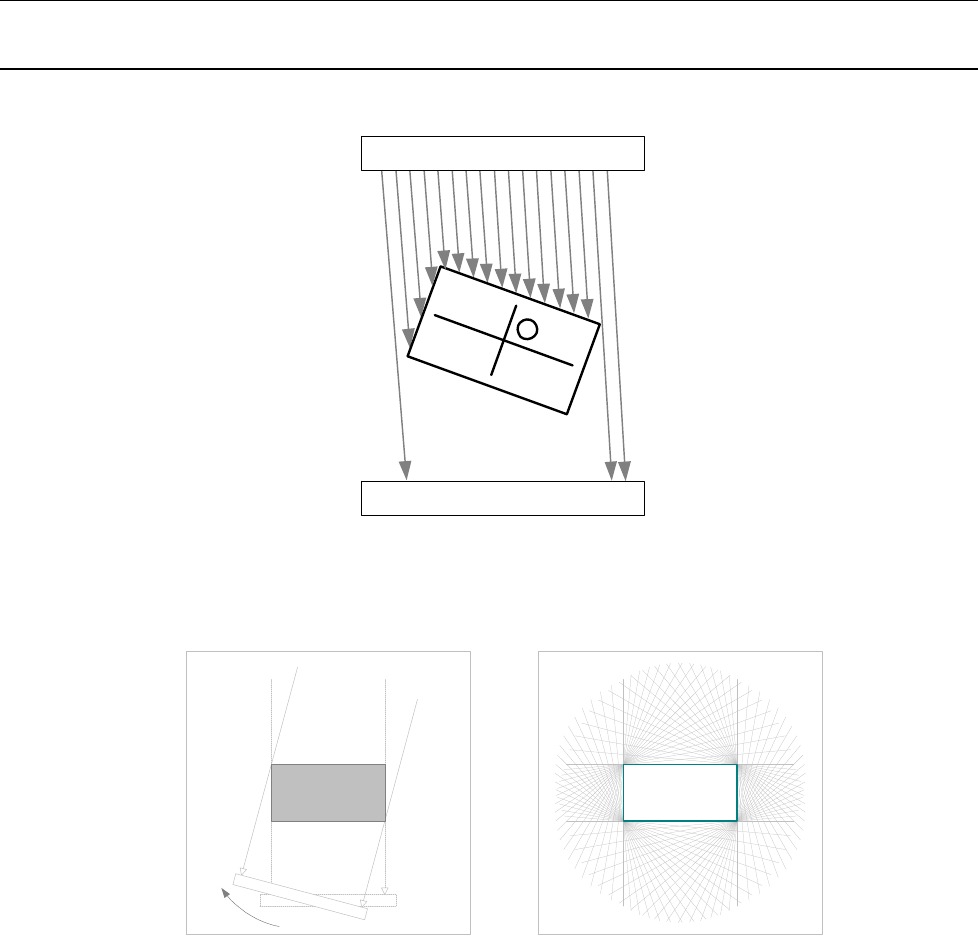
(2) 测定
如果将元件在 LED 中旋转,则影子的宽度发生变化。LNC120 检测影子的边缘(边界线)。
将元件旋转 360°,就可收集到各种角度影子的边缘。以此为基础,在 LNC120 内部产生出被称
为结艺(String Art)的元件外形,。这成为 LNC120 绕元件周围旋转的影像。
LNC120 利用结艺和被指定的元件形状(Shape Template),检测出元件外形,计算出位置偏移、
角度偏移、元件尺寸,通知贴片机。