JM-20_动作说明书.pdf - 第14页
Rev 1.0 动作说明书 3-1 3 关于各项功能 3-1 原点复归动作 3-1-1 X, Y, Z, θ 轴 3-1-1-1 原点复归动作的时机 Z , θ 的所有轴和支撑台轴同时开始原点复归。 XY 轴是在 Z 轴原点复归结束、达到安全的高度之后再 开始动作。为了确认所有轴的原点定位结束,在 CAL 块上进行等候,确认动作结束后,经过 200msec 后拍摄 CAL 块的第一标记。 将标记识别结果用于 XY 的坐标校正, 结束原点…
Rev 1.0
动作说明书
2-5
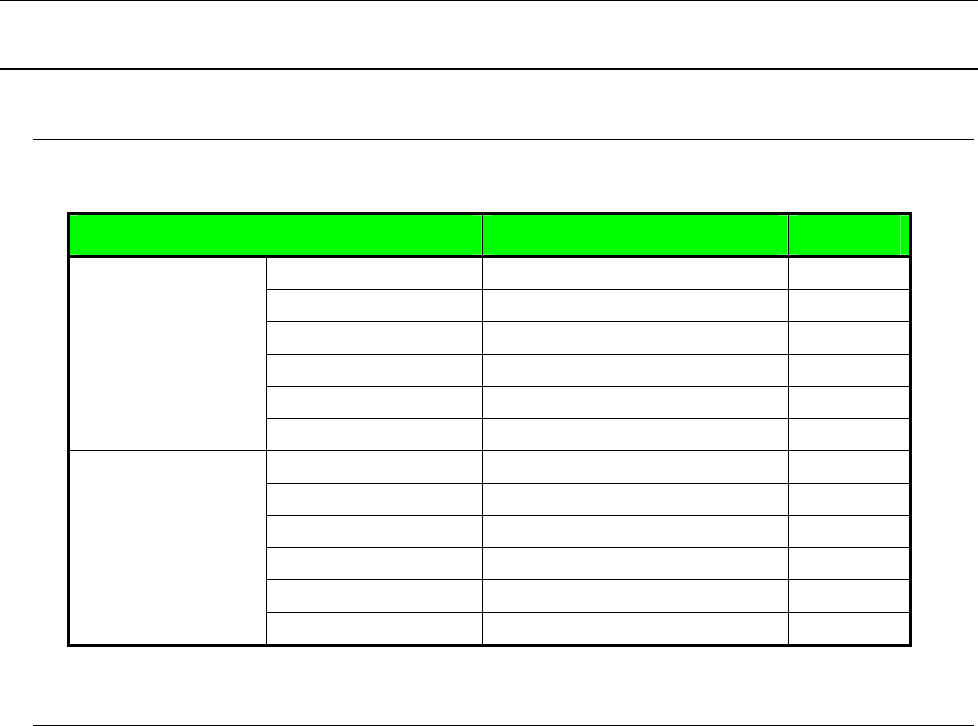
2-3-1-2 性能
用于 LNC 轴驱动的 Z 电动机及 θ 电动机的性能如下表所示。
项目 规格 备注
额定输出 30 [W]
额定转速 3000 [r/min]
最大转速 9000 [r/min]
编码器分辨率 262144 [pulse/rev]
编码器输出 三菱串行
Z 电动机
指令 1 脉冲的移动量 0.00125 [mm]
额定输出 30[W]
额定转速 3000 [r/min]
最大转速 6000 [r/min]
编码器分辨率 262144 [pulse/rev]
编码器输出 三菱串行
θ 电动机
指令 1 脉冲的移动量 0.005 [deg/pulse]
2-3-1-3 故障检测
① 以伺服放大器进行通信故障检测,当电缆线脱落时发出 ALM16,伺服断开。
② 以伺服放大器进行通信故障检测,因断线等导致通信故障发出 ALM20,伺服断开。
③ 伺服断开时,利用装有元件贴装头的贴片头抬升气缸产生轴的上升动作,所有轴上升到 XY 移动高
度。
Rev 1.0
动作说明书
3-1
3 关于各项功能
3-1 原点复归动作
3-1-1 X, Y, Z, θ轴
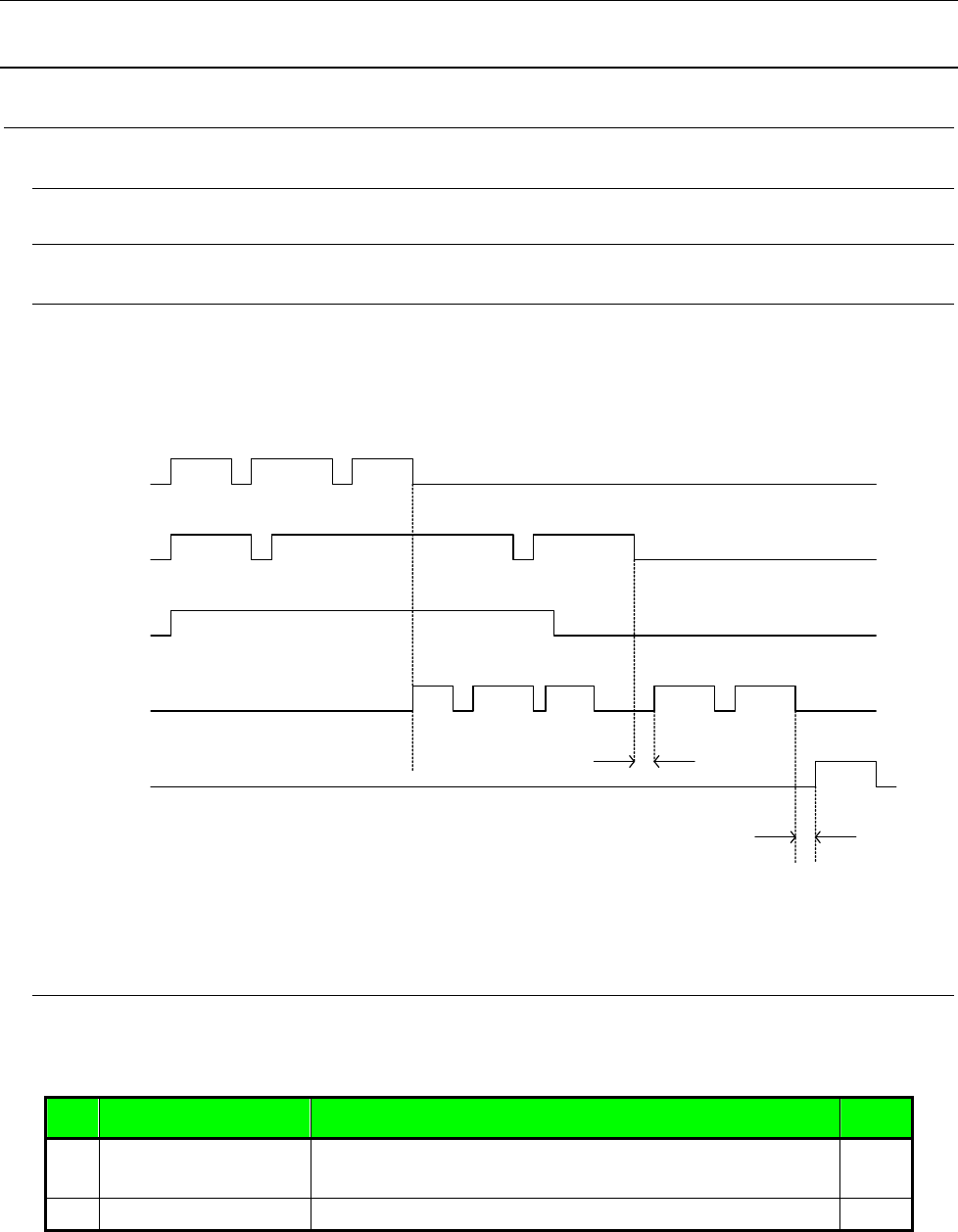
3-1-1-1 原点复归动作的时机
Z,θ 的所有轴和支撑台轴同时开始原点复归。XY 轴是在 Z 轴原点复归结束、达到安全的高度之后再
开始动作。为了确认所有轴的原点定位结束,在 CAL 块上进行等候,确认动作结束后,经过 200msec
后拍摄 CAL 块的第一标记。将标记识别结果用于 XY 的坐标校正,结束原点复归。并且,为了使 θ 轴
的编码器与 LNC 的计数一致,将 LNC 的计数器复位。
200
300
安全
高度
预备
动作
Z 轴
原点复归
θ 轴
预备动作
原点复归
偏
心吸
收
角度
支撑台轴
原点复归
XY 轴
确定
原点
CAl BlK
预备
动作
识别
原点
复归
LNC 计数器
复位
复位
3-1-1-2 原点复归动作之后的LNC检测动作
在原点复归动作中执行 CAL 块的标记识别后,进行以下的 LNC 检测动作。
①允许以 MSP 通过检测。
NO. 检测内容 MSP
① 激光通信错误的复原
处理
当发生通信错误时进行初始化,使报警复原 ○
② 激光的编码器确认 检查 LNC 的 U/D 计数器是否与 θ 轴的旋转同步 ×
Rev 1.0
动作说明书
3-2
3-1-1-3 各轴各自的原点复归动作
<原点复归方式>
轴 原点复归方式 概述
X,Y 限位开关起点式原
点复归
在 DOG 开关前端开始减速,返回一次到 DOG 开关前端,再次
以爬行速度进行移动,以离 DOG 开关前端的第一个Z相信号作
为原点。
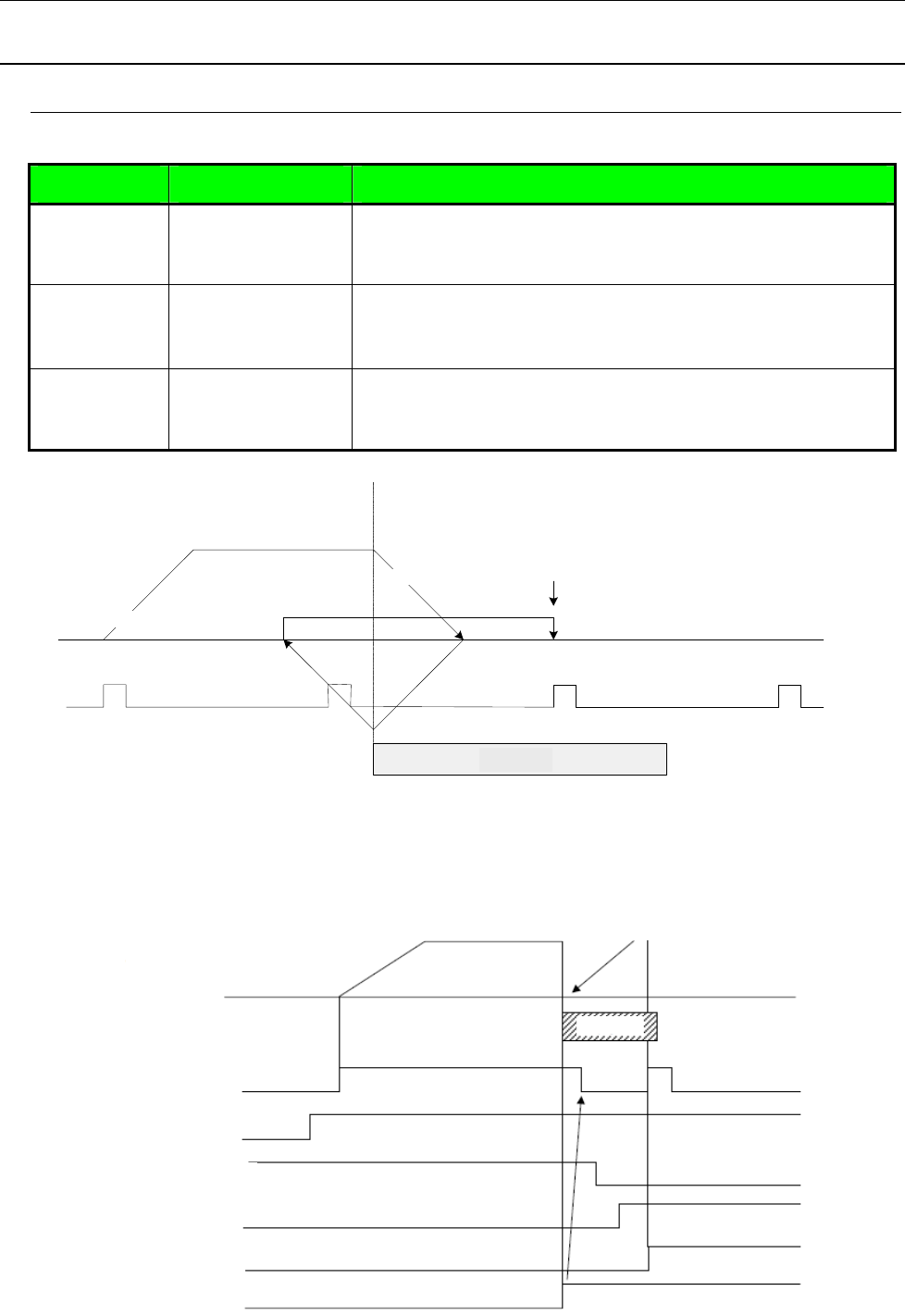
Z 接触式原点复归 使 Z 轴向上方旋转,接触到限动器。
然后当马达的发生扭矩达到设置好的扭矩阈值时使 Z 轴向下方
旋转,以第 1 个 Z 相为原点。
θ 比例式原点复归 采用与 XY 相同的比例式原点复归。由于 θ 轴没有近点限位开
关,所以与控制参数的限位开关逻辑相反,在始终处于检测到
近点限位开关的状态下进行原点复归。
近点限位开关
反转
原点
到限位开关减速
Z 相脉冲
限位开关起点式原点复归
起动
爬行速度
原点复归速度
接触式原点复归
限动器
原点
TL
C(扭矩限制工作中)
ZP(原点复归结束)
ZRN(原点复归方式)
JOG(JOG 运转方式)
TL(扭矩控制)
ST(运转启动)
马达速度