192277 - Micron Technical Reference Volume 3.pdf - 第45页
CAMERA SYSTE M MODULE OVERVIEW Chapter Issue 9, Feb 18 Technical Reference Manual 23.3 The camera assembly traverses horizontally in the X and Y axis to position the camera to carry out the following fu nctions: • Board …
CAMERA SYSTEM MODULE
OVERVIEW
23.2 Technical Reference Manual Chapter Issue 9, Feb 18
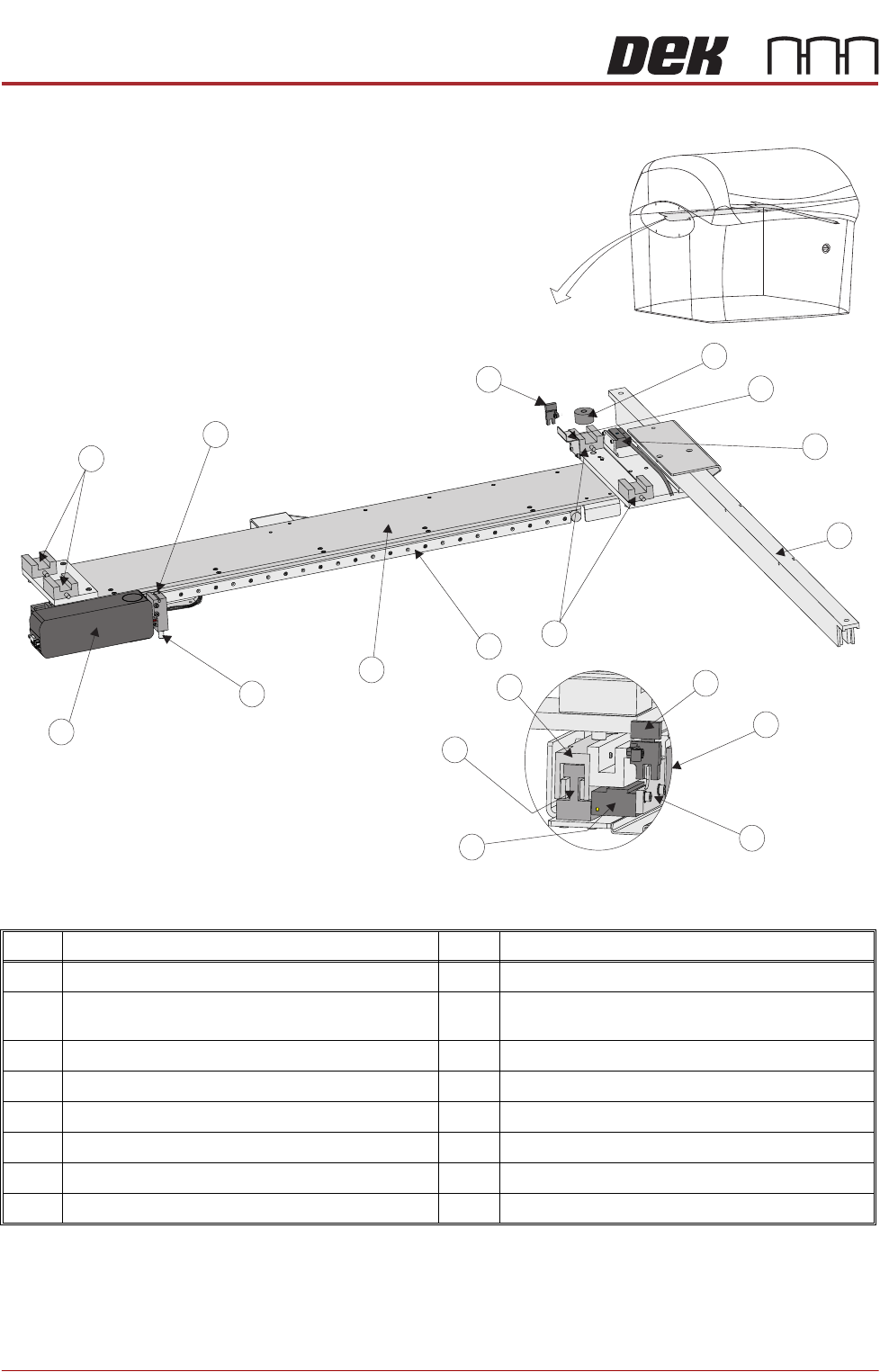
Figure 23-2 Camera Overview Linear Drive
NOTE
For Details on the Camera Mounted Board Stop and Board Stop Extended
Sensor see the Board Stop Chapter.
Item Description Item Description
1 Camera Y End Stop 9 Camera Assembly
2 Camera Y Home Vane 10 Camera Mounted Board Stop &
Board Stop Extended Sensor (See Note)
3 Camera Y Encoder 11 Camera Y Home Sensor
4 Camera Y Magnet Track 12 Camera X Home Vane
5 Linear Bearing (in 4 positions) 13 Camera X Encoder
6 Camera X Axis Linear Bearing 14 Camera X Forcer
7 Camera X Axis Support Platform 15 Camera X Magnet Track
8 Board at Stop Sensor 16 Camera X Home Sensor
1
4
2
5
7
8
9
10
11
3
5
6
13
12
14
9
View on End of Camera
15
16

CAMERA SYSTEM MODULE
OVERVIEW
Chapter Issue 9, Feb 18 Technical Reference Manual 23.3
The camera assembly traverses horizontally in the X and Y axis to position the
camera to carry out the following functions:
• Board Stop
• Fiducial Capture - for stencil to board alignment
• Site Capture - pre and post printing for 2Di inspection
• Moving the Underscreen Cleaner
Positioning of the camera assembly is carried out by the X and Y drive
mechanisms. There are two types of drive system, linear servo motor systems
and rotary servo motor systems.
The camera contains an optical unit for image focusing and a lighting unit for
board and stencil illumination during fiducial and 2D camera capture operations.
The camera carriage also contains the following:
• Camera Board Stop
• Board at Stop sensor
• Board Stop Extended Sensor
The camera board stop is a pneumatically driven unit which is lowered to stop
the board in position ready for clamping and vision alignment to take place.
The board at stop diffuse background suppressed opto detects the board when
it reaches the board stop. This starts a timer which when elapsed stops the belts
and clamps the board.
The board stop extended sensor is fitted to ensure that the board stop is raised
before any camera carriage movement is demanded.
The camera positions are referenced from the home position. Each camera axis
only homes during initialisation, which can be from power-up or exiting diagnos-
tics.
The camera system also provides the drive mechanism for the under screen
cleaner.
The camera system contains one of the following cameras:
• Hawkeye 750
• Hawkeye 1700
CAMERA SYSTEM MODULE
ELECTRICAL SCHEMATIC
23.4 Technical Reference Manual Chapter Issue 9, Feb 18
ELECTRICAL SCHEMATIC
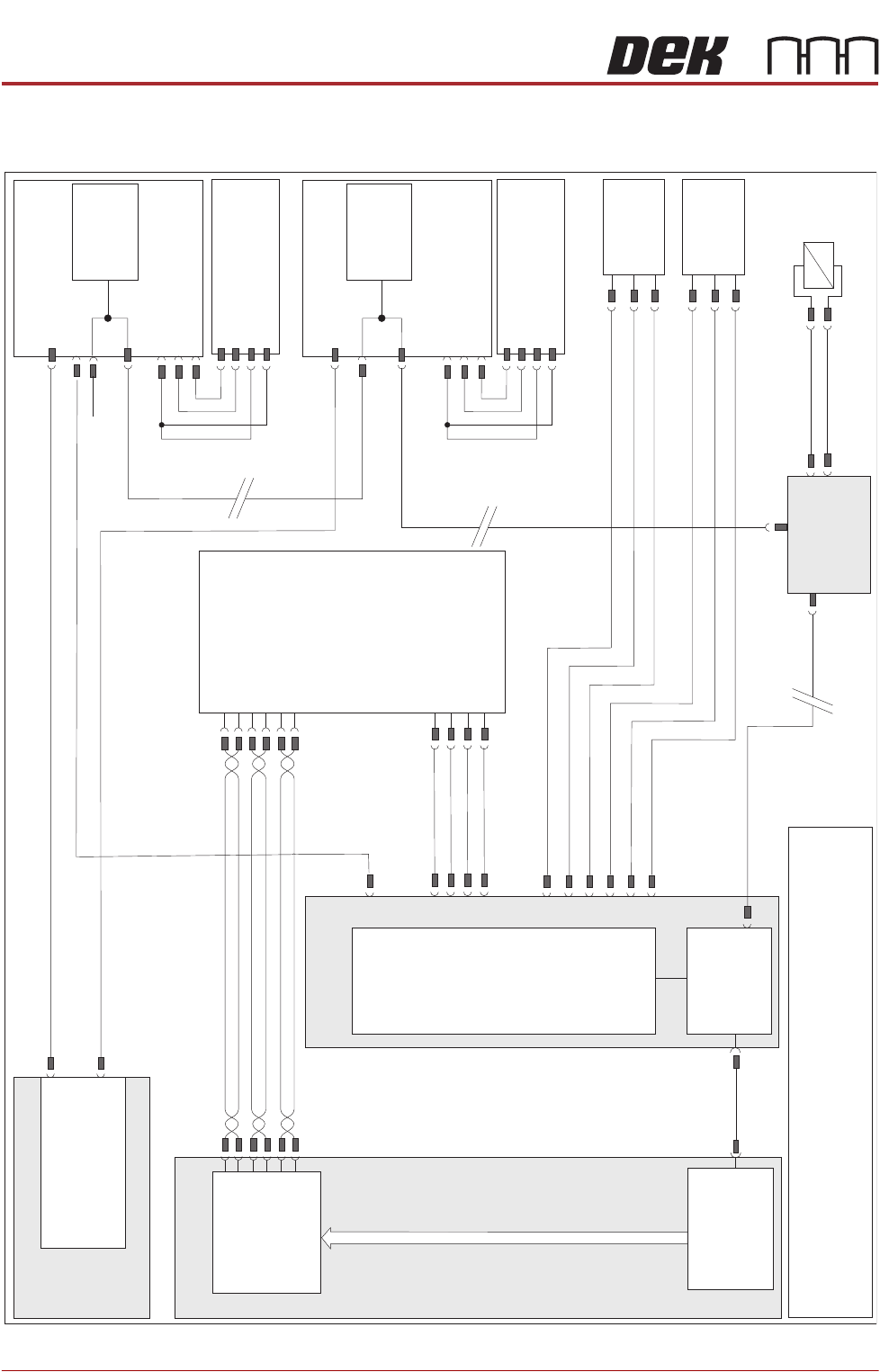
Figure 23-3 Rotary Drive Schematic
M37 Power Supply Module
Power Distribution
PCB
CAN Terminator
N8SK2
Camera X Motor
Node 8
M37PL18
Servo DC Supply & 24V US (Motor Logic)
N8PL1
N8PL4
DIG IN 2
DIG IN 2
0V
0V
Signal
Signal
24V
24V
(L)
(L)
Camera X
Home 10SE01
Fork Opto
CAN
Encoder/
Decoder
N8SK3
CAN In
Camera Y Motor
Node 9
N9PL1
N9PL4
Camera Y
Home 10SE02
Fork Opto
CAN
Encoder/
Decoder
N9SK3
CAN In
CAN Out
M37PL19
PC
P
C
I
B
u
s
Motherboard
USB
Servo DC Supply & 24V US (Motor Logic)
N9SK2
M36 Machine
Control Enclosure
NextMove
Interface
NextMove ES
(I/O Node 1)
M36PL35
CAN Bus
Main Machine
I/O Node 2
N2SK2
CAN In
16SK14
16SOL14
Board
Stop
DIG OUT 10
N2PL4
0V
CAN
Out
N2SK3
Board Stop
Extended
10SE20
Board At
Stop
10SE07
10SK24
M36PL11
0V
+12V
DIG IN 8
+12V
0V
DIG IN 9
NOTE
The breaks in the CAN Bus chain reflect that additional I/O Nodes
may be fitted, refer to Machine Control chapter for the complete
CAN Bus chain.
Power
3PL55
GND
TP B-
TP B+
TP A-
TP A+
Digital
Camera
10PL17
10SK13
PCI Interface
Card
M36PL16
M36PL5
Trigger
0V
+24V US
0V