M8_ServiceManual_e.pdf - 第98页
4 Electrical Section 4-30 Motor Troubles The alarm codes when the motor alarm ha ppened are shown in the below tabl e. The alarm code in the error m essage log i s shown in the decimal number, but the actual al arm code …
4 Electrical Section
4-29
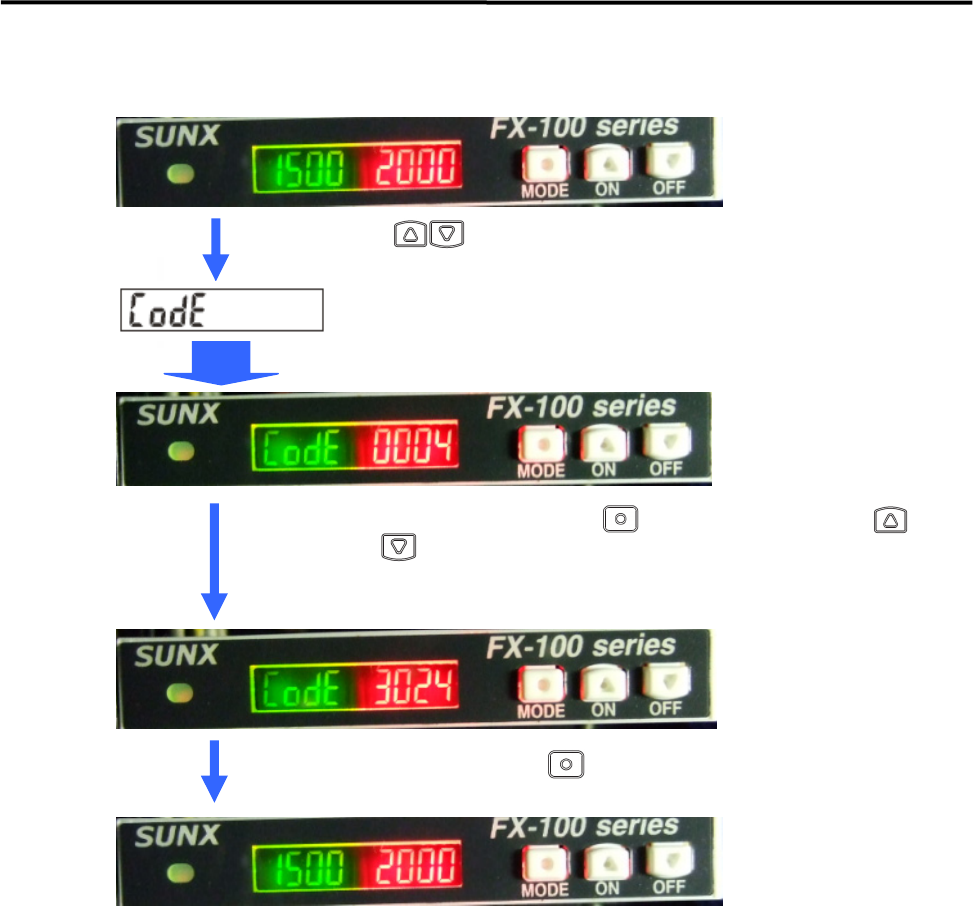
⑤ Set up the code setting
Press keys at the same time for four seconds.
⑥ Finally, adjust the conveyor width to the minimum, and then confirm that the conveyor does not
interfere with the sensor and PCB can be detected when loading PCB.
* The contents of the threshold follow-up cycle setting is .
Auto
Blink the first digit by pressing key, and then select code by
and key.
Repeat the same operation from second to third digit, then display “3024”.
Fix the code by pressing key.
Confirm that the setting has been changed.
4 Electrical Section
4-30
Motor Troubles
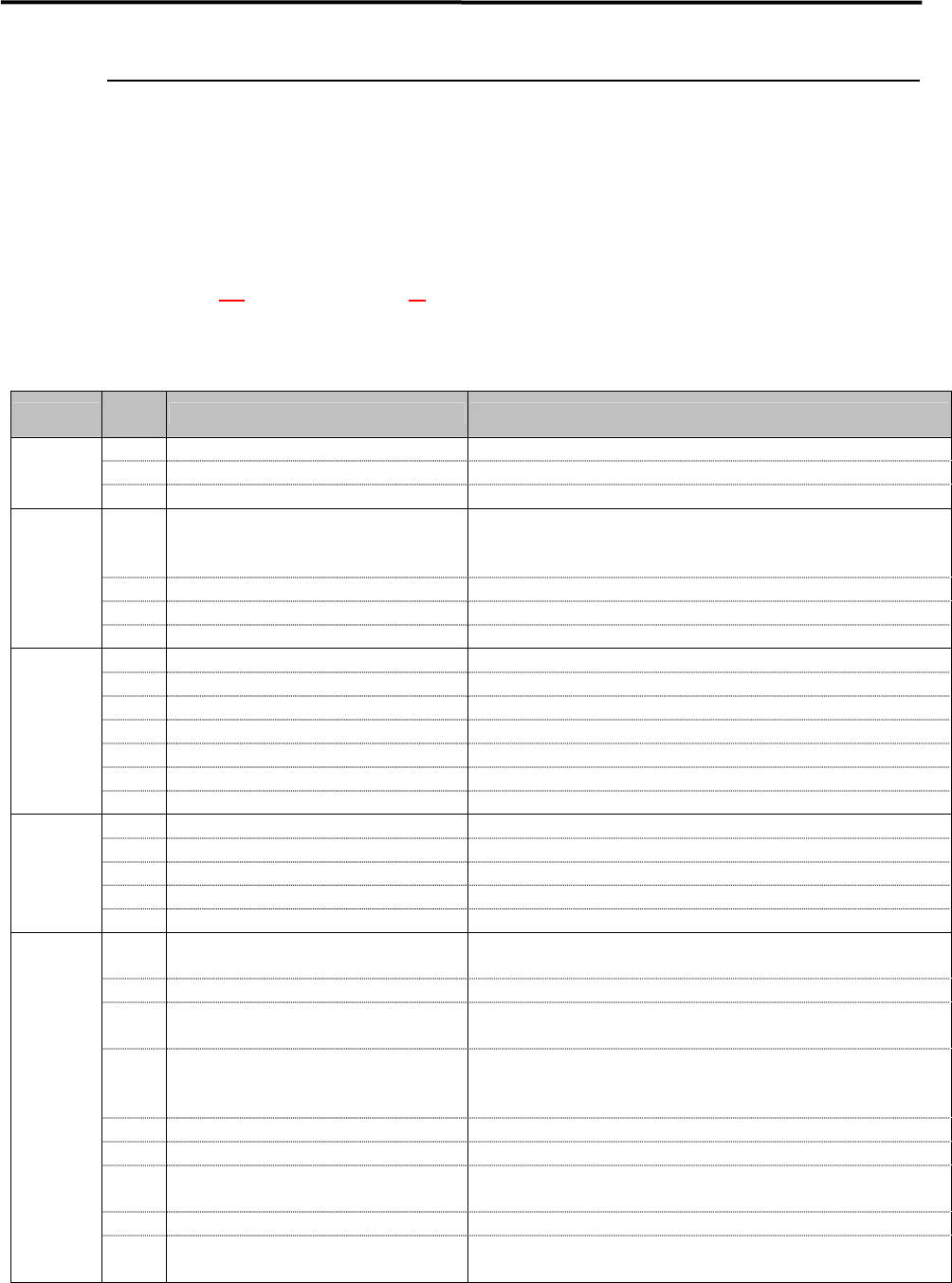
The alarm codes when the motor alarm happened are shown in the below table.
The alarm code in the error message log is shown in the decimal number, but the actual alarm code is
followed by the hexadecimal system, then the code number has to be converted the hexadecimal number in
order to refer to the alarm code list.
Example)
・Error Message ; “Head 1 Y Axis Servo Alarm has been detected. (Alarm Code;113(2) Control Power Short Voltage)
・Alarm Code 113 (Decimal Number) ⇒ 71 (Hexadecimal Number)
Alarm Code List
Type
Alarm
Code
Alarm Name Alarm Meaning
01H Serial Communication Abnormal 1
・Not receive normal frame 4 times in row.
02H Serial Communication Abnormal 2
・Not receive synchronous frame 4 times in row.
Communi
cation
Error
03H Serial Communication Abnormal 3
・Receives synchronous frame at different time from update time.
21H Power Element Error (Over Current)
・Overcorrect of driving module
・Driving power error
・Driving module overheating
22H Current Detection Error 0
・Current detect value error
23H Current Detection Abnormal 1
・Current detect circuit error
Driving
System
Error
24H Current Detection Abnormal 2
・Communication error with current detect circuit
41H Overload 1
・Excessive effective torque
42H Overload 2
・Stall overload
43H Regeneration Error
・Excessive regenerative load ratio
51H Amplifier Overheating
・Overheat detection of AMP ambient temperature
52H In-rush prevention resistor overheating
・Detects overheating of in-rush prevention resistor
53H DB Resistor Overheating
・Overheat detect of DB resistor
Load
Error
54H Internal Overheating
・Excessive DC voltage of main circuit
61H Overvoltage
・Excessive DC voltage of main circuit
62H Main Circuit Short Voltage
・DC voltage failure of main circuit
63H Main Power Failed Phase
・One phase disconnection of 3 phase main circuit power
71H Control Power Short Voltage
・Voltage failure of control power
Power
Error
72H +12V power loss
・+12V power loss
81H Pulse Signal Error 1 of Encoder Phase A, B
・Signal line disconnection (A,B,Z) of incremental encoder
・Disconnection of power line
82H Absolute Signal Disconnected
・Signal line disconnection (PS) of absolute encoder
84H
Communication Error between Encoder
and Amplifier
・Encoder serial signal time out
85H Encoder Initialization Error
・Read failure of incremental encoder CS data
・Initialization error of absolute encoder
・Cable disconnection
87H CS Wire Disconnected
・CS signal line disconnection
91H Encoder Command Error
・Mismatch of send command and receive command
92H Encoder FORM Error
・Start/Stop bit error
・Shortage of data length
93H Encoder SYNC Error
・Cannot receive data within specified time after command is sent.
Encoder
Wiring
Error
94H Encoder CRC Error
・Mismatch of CRCs generated form the received data and has been
sent
4 Electrical Section
4-31
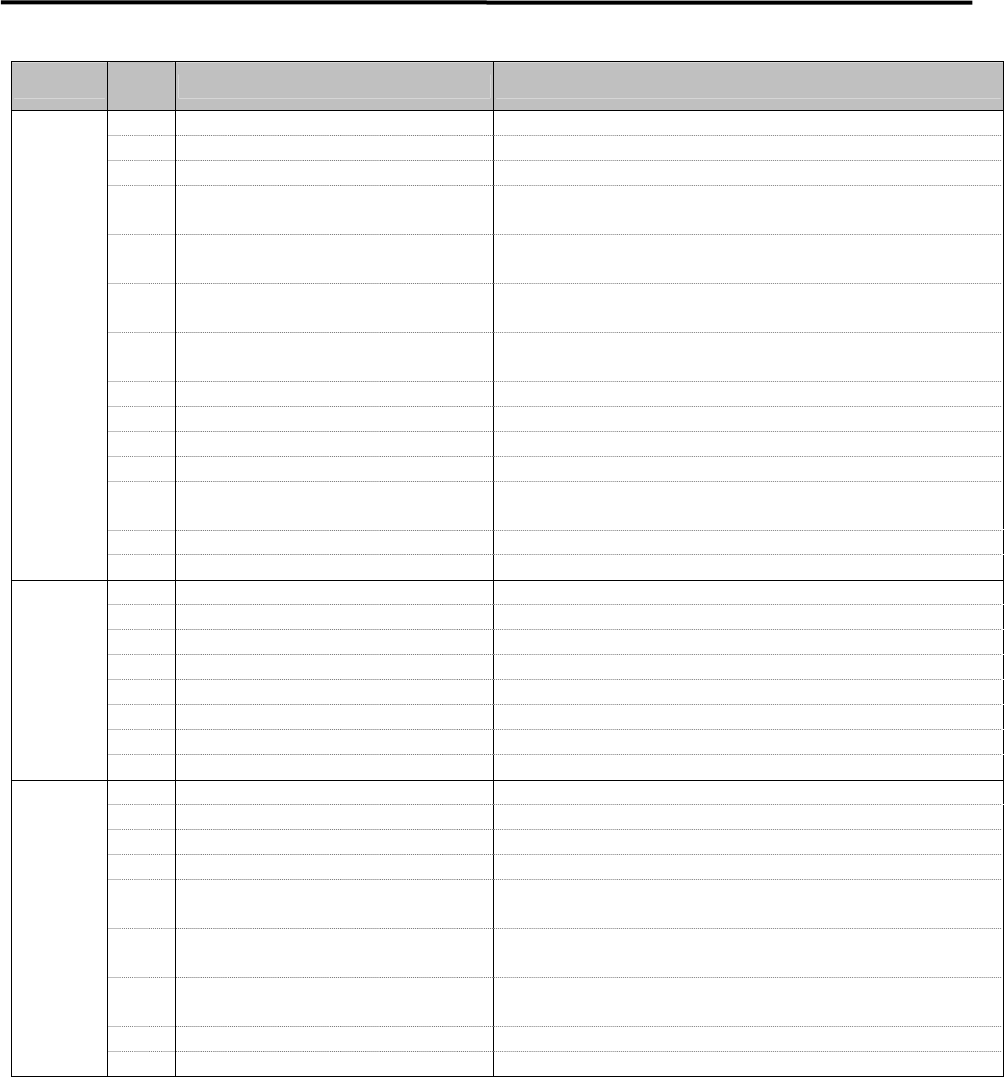
Type
Alarm
Code
Alarm Title Alarm Contents
A1H Encoder Error 1
・
Encoder inner parts trouble
A2H Absolute encoder battery error
・
Battery voltage failure
A3H Encoder overheating
・
Motor built-in encoder overheating
A5H Encoder error 3
・
Multi built-in encoder overheating
・
Thermo-sensor operation error
A6H Encoder error 4
・
EEPROM data not set inside encoder
・
Multi-rotation data overflow
A7H Encoder error 5
・
Resolver disconnection
・
Light emitting element error inside encoder
A8H Encoder error 6
・
Resolver disconnection
・
Light emitting element error inside encoder
A9H Encoder failure
・
Encoder failure
B2H Encoder error 2
・
Position data defect
B3H Absolute encoder rotation counter error
・
Multi-rotation count defect has been detected
B4H Absolute encoder 1 rotation counter error
・
1 rotation coefficient defect has been detected
B5H
Over permissible speed at absolute encoder
turn-on.
・
Over permissible motor speed at power turn-on.
B6H Encoder inner memory error
・
EEPROM access error inside encoder
Encoder
Main
Body
Error
B7H Acceleration error
・
Over permissible motor acceleration speed
C1H Over-speed
・
Motor speed exceeds 120% of maximum speed.
C2H Velocity control error
・
Inconformity of current command and acceleration code.
C3H Velocity feedback error
・
Motor power line disconnection
C4H Velocity reach error
・
Motor velocity exceeds the velocity reach set value.
D1H Excessive position deviation
・
Position deviation counter exceeds set value.
D2H Position command pulse frequency error 1
・
Position command pulse to be input has high frequency.
D3H Position command pulse frequency error 2
・
Overflow of position command low pas filter
Control
System
Error
DFH Test mode termination
・
Detected when test mode ends
E1H EEPROM error
・
Amplifier built-in test mode ends.
E2H EEPROM check sum error
・
Check sum error of EEPROM error
E3H Inner RAM error
・
Access error to CPU built-in RAM
E4H
Processing error between CPU
~
ASIC
・
Access error between CPU
~
ASIC
E5H Parameter error 1
・
Detected when not-applicable or undefined amplifier, motor, encoder
or code is selected.
E6H Parameter error 2
・
Combination error of motor/encoder/amplifier codes that have been
set from system parameter.
E8H Parameter error 3
・
Contents mismatch between that of initial bank in EEPROM and that
of initial bank received by serial.
F1H Task processing error
・
CPU interrupt processing error
Control
Element
Memory
System
Error
F2H Initial time out
・
Detected when initialization does not terminate within specified time.