2. SM471_Administrators_Guide(Kor_Ver1).pdf - 第105页
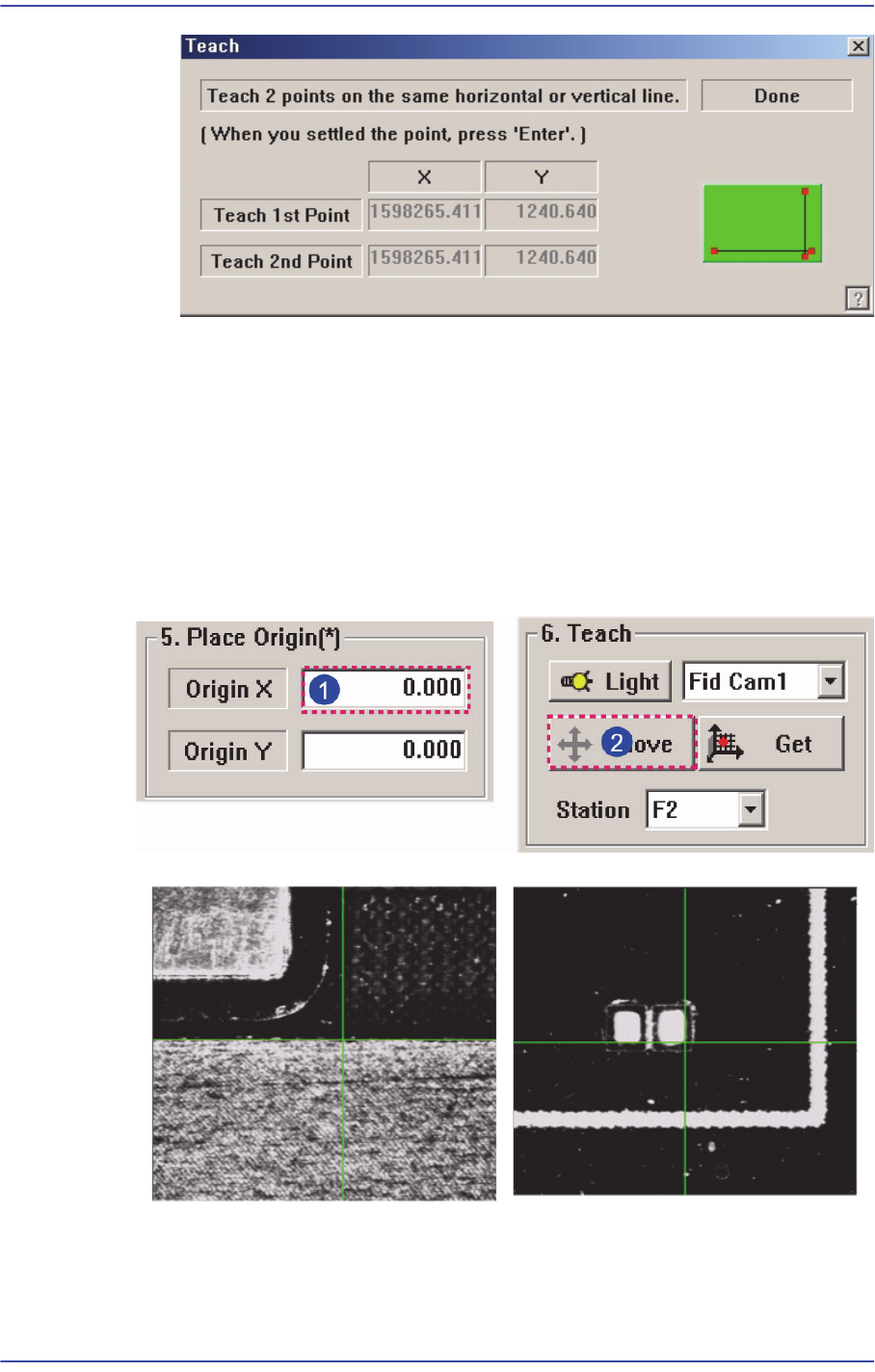
6-5 Board 정의 <Origin X> 에디트박스 PCB 기판의 장착원 점의 X 좌표를 설정합니다 . <O rigin Y> 에디트박스 PCB 기판의 장착원 점의 Y 좌표를 설정합니다 . <Origin X> 또는 <Origin Y> 에 커서를 클릭하고 <8. Teach> 영역의 <Move> 또는 <Get> 버…
6-4
Samsung Component Placer SM471 Administrator's Guide
두 점을 티칭한 후 “Enter”키를 누르면 초기각도 티칭작업이 완료됩니다.
<5. P
lace Origin> 영역
PCB기판의 장
착원점을 설정합니다. 이 원점은 System 의 PCB Origin에서 PCB
기판의 장착원점까지의 오프셋으로 정의됩니다. 설정된 좌표를 기준으로 작업
할 Board의 기준점을 설정합니다.
일반적으로 St
opper에 가까운 패턴을 정하여 설정합니다. Board 내에 확인하기
쉬운 위치로 지정하십시오.
[Case 1 - Board Stop 을 활용]
좌표 확인이 용이하
지 않으므로 어레
이PCB에 적용하기 어려움
[Case 2 - PCB내의 패턴을 활용 ]
PCB내의 패턴
을 활용해 좌표 확인
이 용이하므로 어레이PCB에 적용
6-5
Board
정의
<Origin X> 에디트박스
PCB기판의 장착원
점의 X좌표를 설정합니다.
<O
rigin Y> 에디트박스
PCB기판의 장착원
점의 Y좌표를 설정합니다. <Origin X> 또는 <Origin Y>
에 커서를 클릭하고 <8. Teach> 영역의 <Move> 또는 <Get> 버튼을 클릭하면
, 콤보박스에서 선택된 대상을 기준으로 장착원점을 티칭할 수 있습니다 .
<6. Tea
ch> 영역
XY, Z축 구동모
터를 회전시켜 콤보박스에서 선택된 대상을 지정한 좌표의 위치
로 이동시키거나, 현재 좌표를 얻기 위해서 사용됩니다.
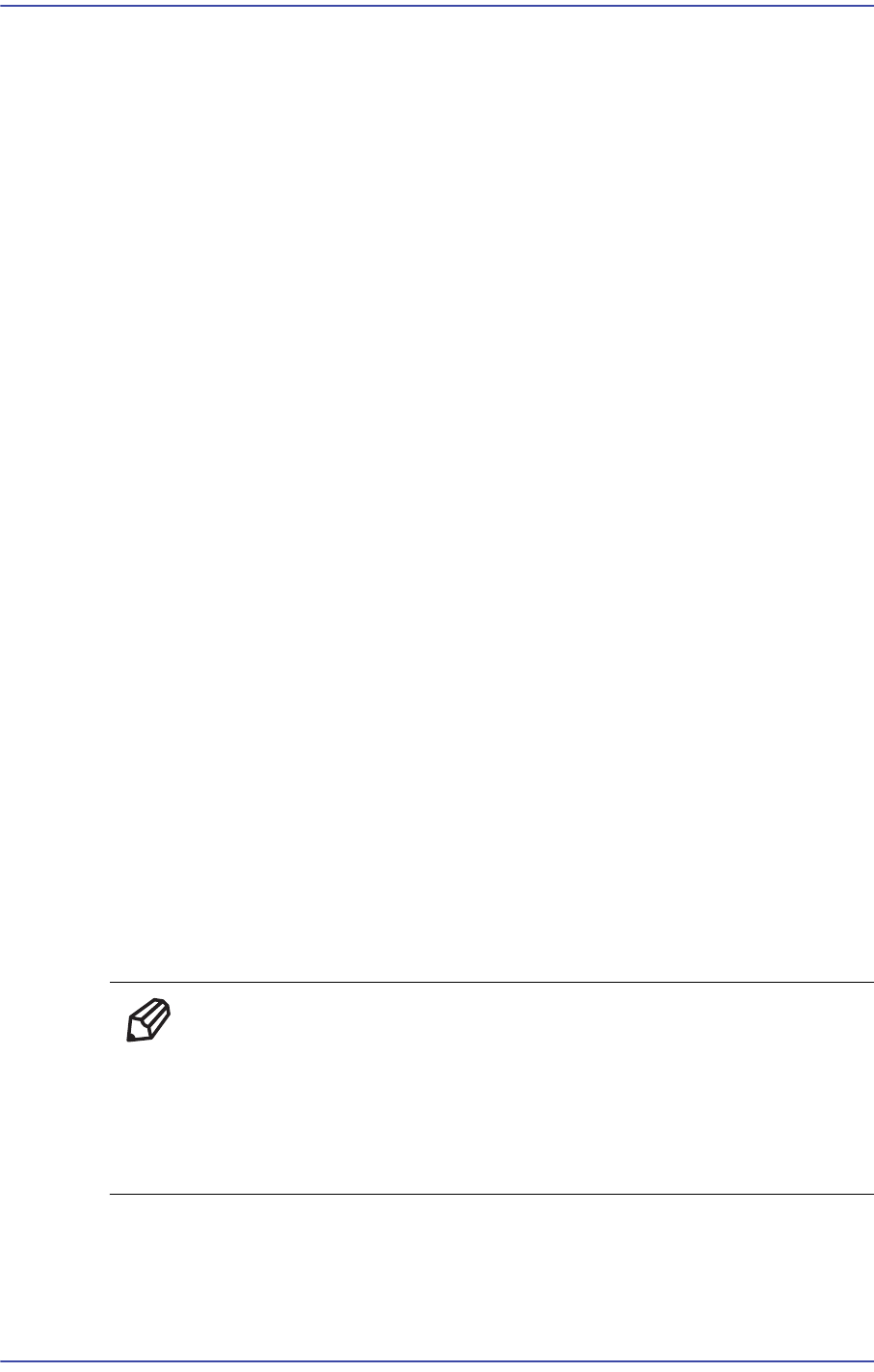
<Li
ght> 버튼
피두셜카메라의 조명을 설
정합니다. 이 버튼을 클릭하면 다음과 같은 대화
상자를 표시합니다.
콤
보박스
XY, Z축 구동
모터를 회전시켜 지정한 좌표의 위치로 이동시킬 대상을 선택
6-6
Samsung Component Placer SM471 Administrator's Guide
하거나, 현재 좌표를 알고 싶은 대상을 선택하기 위해 사용됩니다. 선택 가
능한 대상은 다음과 같습니다;
Fid Cam2: Fiducial Camera1 (Front)를 선택합니다.
Fid Cam4: Fiducial Camera2 (Rear)를 선택합니다.
Head1~10: Front Gantry의 1번~10번 Head를 선택합니다.
Head11~20: Rear Gantry의 11 번~20번 Head를 선택합니다.
<Move> 버튼
콤보박스에서 선택한 대상을 지정한 좌표의 위치로 이동시킵니다. 이 때,
<Move> 버튼을 클릭하기 전에 좌표와 관련된 대상(Place Origin, MoveZ)을
마우스로 클릭해야 합니다.
<Get> 버튼
콤보박스에서 선택한 대상을 기준으로 XY, Z축 좌표를 얻습니다. 이 때,
<Get> 버튼을 클릭하기 전에 좌표와 관련된 대상(Place Origin, MoveZ)을 마
우스로 클릭해야 합니다 .
<7. Board Size> 영역
Board 사이즈를 설정합니다.
<X> 에디트 박스
PCB기판의 길이를 입력합니다.
<Y> 에디트 박스
PCB기판의 폭을 입력합니다.
<Z> 에디트 박스
PCB기판의 두께를 입력합니다.
<Conv.Width > 버튼
설정된 PCB기판의 폭에 맞게 컨베이어의 폭 조절을 수행합니다.
메 모 본 장비에서 사용할 수 있는 PCB 의 크기는 다음과 같습니다.
최대 510L×460W×4.2H [ mm ] - Single Lane/ Long Conveyor
460L×250W ×4.2H [ mm ] – Dual Lane
최소 50L×40W×0.38H [ mm ]
<8. Handling> 영역
PCB작업에 필요한 데이터를 설정합니다.
<Fix Type> 콤보박스