2. SM471_Administrators_Guide(Kor_Ver1).pdf - 第400页
12-84 Samsung Component Place r SM471 Administrator's Guide 12.3.11. Board Positon Calibration 컨베이어 작업스테이션의 스토퍼 위치와 장착센서의 X 위치를 티칭합니다 . 다음은 보 드스탑 위치를 켈리브레이션하 는 과정입니다 . 1. 마우 스 포인터로 <Sensor X> 에디트박스를 선택하고 <M…
12-83
Machine Calibration
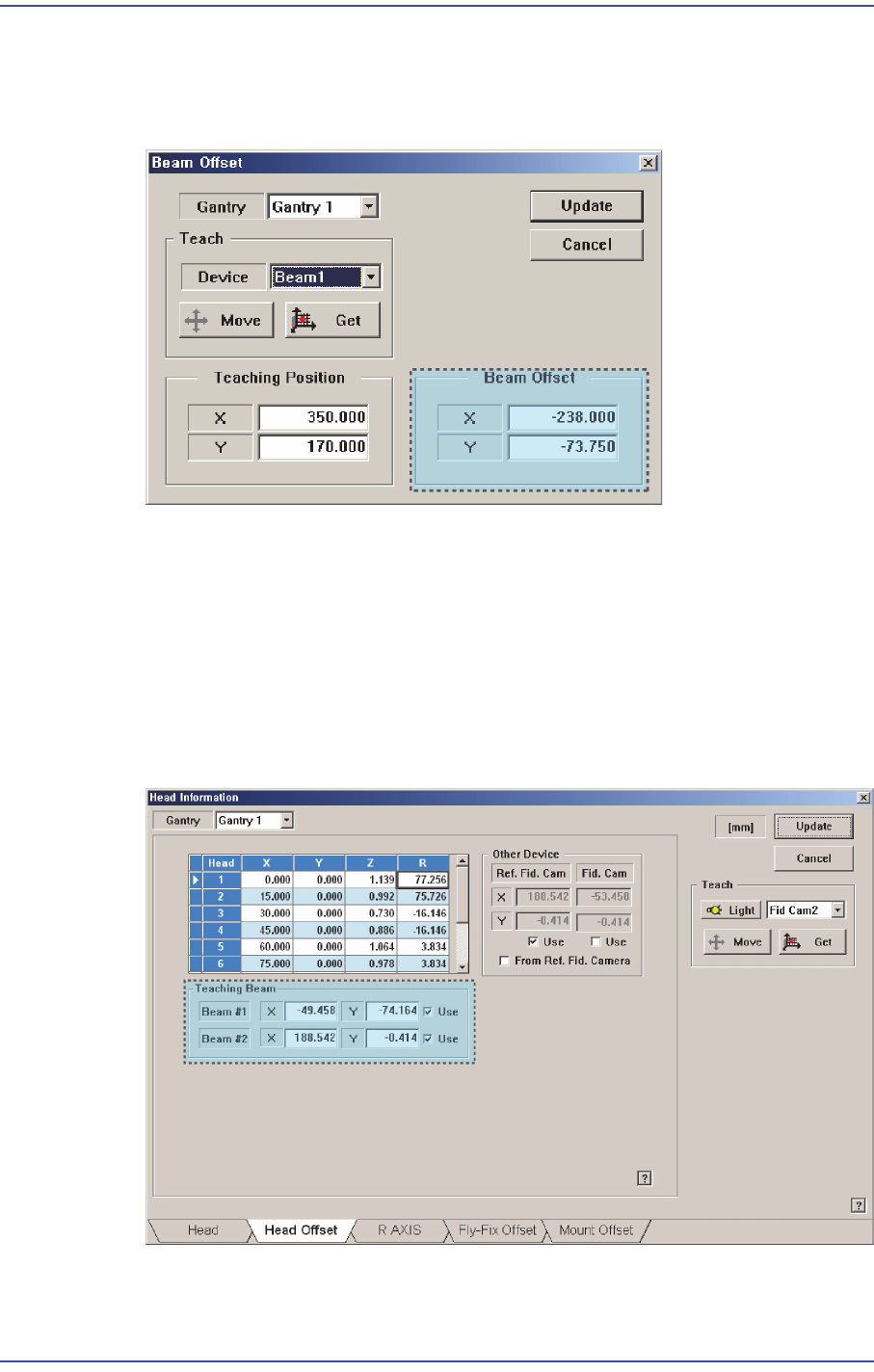
5. 티칭 도구를 Beam1(또는 Beam2)으로 선택한 후, 조그 박스를 이용하여
<Teaching Position> 위치로 이동하십시오.
6. <Get> 버튼
을 눌러 현재의 위치를 <Beam Position>에 저장하십시오.
7. <Gantry> 콤보박
스에서 Gantry2를 선택하고, Gantry1과 동일한 방식으로 캘리
브레이션을 수행하십시오.
8. <Update> 버튼
을 눌러 설정된 값을 저장하십시오.
9. 결과값
은 System Setup 메뉴의 Head Offset 대화상자에서 확인할 수 있습니다.
10. <Gantry> 콤보박
스에서 Gantry2를 선택하고 Gantry1과 동일한 방식으로 캘리브
레이션을 수행하십시오.
결과값은 System Setup메뉴
의 R Axis대화상자에서 확인할 수 있습니다.
12-84
Samsung Component Placer SM471 Administrator's Guide
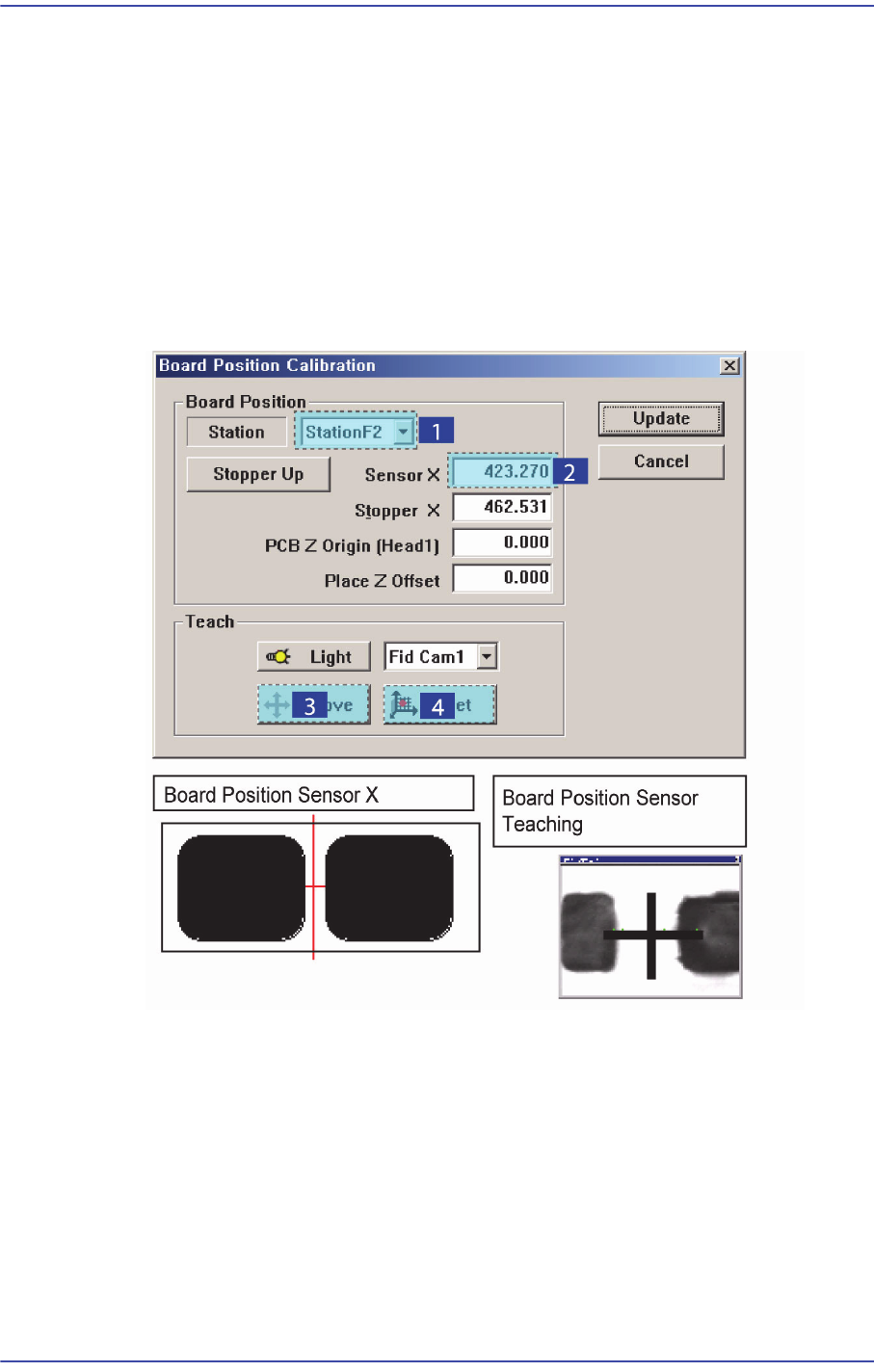
12.3.11. Board Positon Calibration
컨베이어 작업스테이션의 스토퍼 위치와 장착센서의 X 위치를 티칭합니다.
다음은 보
드스탑 위치를 켈리브레이션하는 과정입니다.
1. 마우
스 포인터로 <Sensor X> 에디트박스를 선택하고 <Move> 버튼을 클릭하여
Sensor X의 위치로 해당 Fiducial Camera를 이동시키십시오.
2. 티
칭박스를 이용하여 정확한 위치를 티칭하십시오. 그리고 <Get> 버튼을 클릭
하여 Sensor X의 정확한 좌표값을 입력하십시오 . SM471의 경우, 동일한 방법으
로 StationF2와 StationR2에 대해서 각각 티칭하십시오.
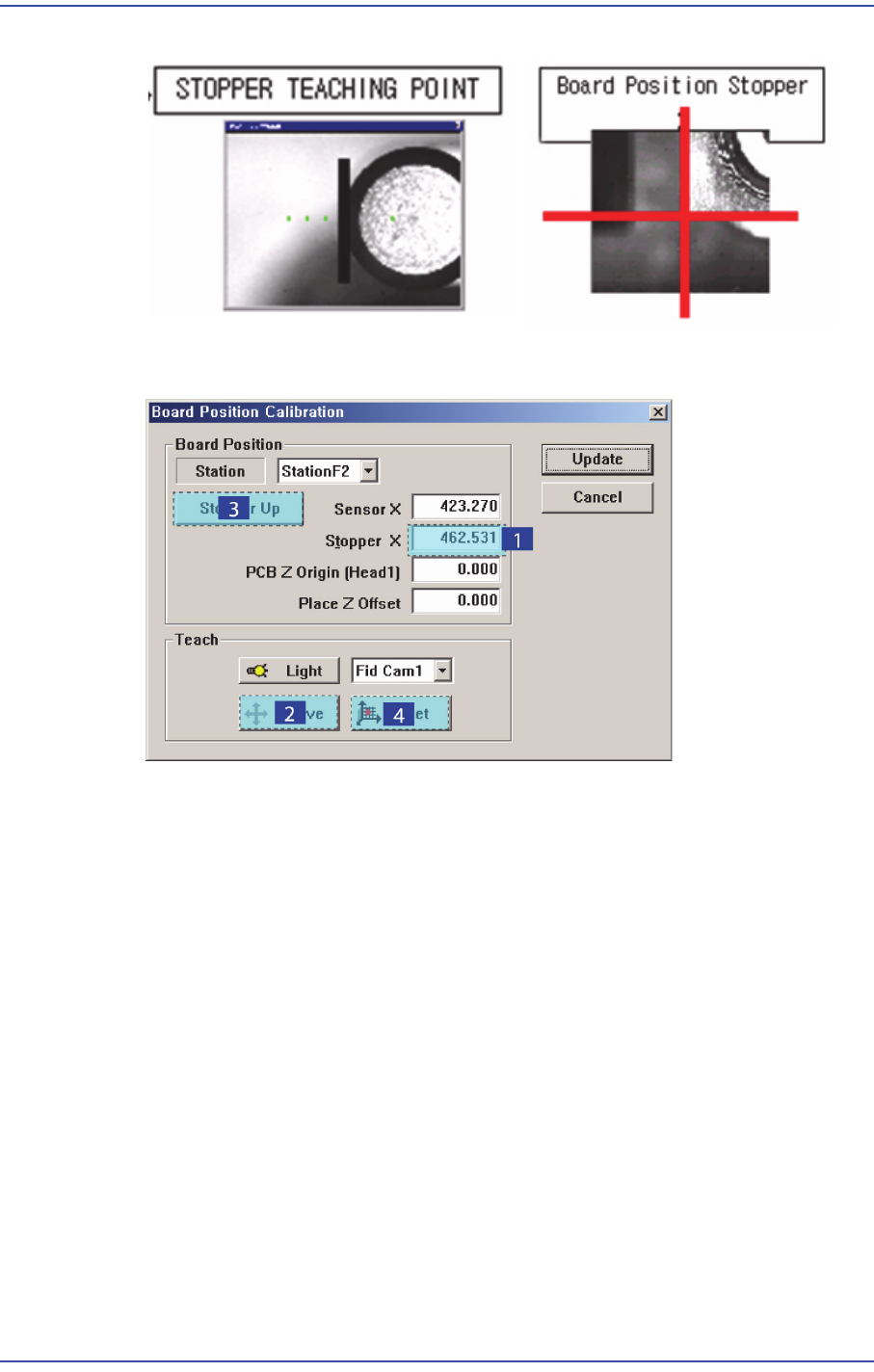
3. 마
우스포인터로 <Stopper X> 에디트박스를 선택하고 <Move> 버튼을 클릭하여
Stopper X의 위치로 해당 Fiducial Camera를 이동시키십시오.
4. <Stopper Up/Down> 버튼
을 클릭하여 스토퍼를 Up하고나서 티칭박스를 이용하
여 정확하게 스토퍼의 위치를 티칭하십시오.
5. <Get> 버튼
을 클릭하여 <Stopper X> 에디트박스에 좌표값을 입력하십시오.
6. <Stopper Up/Down> 버튼
을 클릭하여 스토퍼를 Down시키십시오. SM411의 경
우, 동일한 방법으로 StationF2와 StationR2에 대해서 각각 티칭하십시오.
12-85
Machine Calibration
7. <Update> 버튼을 클릭해서 Data를 저장합니다.