2. SM471_Administrators_Guide(Kor_Ver1).pdf - 第244页
8-18 Samsung Component Place r SM471 Administrator's Guide <Z> 에디트박스 Offset 값을 입 력합니다 . <OK > 버튼 편집한 내용을 저장 하고 대화상자를 닫습니다 . <Ca ncel> 버튼 편집한 내용을 저장 하지 않고 대화상자를 닫습니다 . <Z Teach> 버튼 Fee…

8-17
공급장치
설정
<Teach> 영역
XY축 구동모터를 회전시켜 선택된 대상을 지정한 좌표의 위치로 이동시키거나
, 선택된 대상의 현재 좌표를 얻기 위해서 사용됩니다.
<Light> 콤보박스
티칭시 사용할 Fiducial Camera의 조명을 설정합니다. 자세한 사항은
“
7.1.1
공통
Align Data
”
참조하시기 바랍니다.
콤보박스
XY축 구동모터를 회전시켜 지정한 좌표의 위치로 이동시킬 대상을 선택하
거나, 현재 좌표를 알고 싶은 대상을 선택하기 위해 사용됩니다. 선택 가능
한 대상은 다음과 같습니다;
Fid Cam2: 전면 Gantry의 Fiducial Camera 를 선택합니다.
Fid Cam4: 후면 Gantry의 Fiducial Camera를 선택합니다.
Head 1 ~ Head 10: 1번 ~ 10번 Head를 선택합니다.
Head 11 ~ Head 20: 11번 ~ 20 번 Head를 선택합니다.
<Move> 버튼
콤보박스에서 선택한 대상을 지정한 좌표의 위치로 이동시킵니다. 이 때,
<Move> 버튼을 클릭하기 전에 원하는 위치에 해당하는 그리드의 셀(Stick
Feeder의 흡착점 좌표) 을 마우스로 클릭해야 합니다.
<Get> 버튼
콤보박스에서 선택한 대상을 기준으로 X, Y 좌표를 얻습니다 . 이 때, <Get>
버튼을 클릭하기 전에 원하는 위치에 해당하는 그리드의 셀(Stick Feeder의
흡착점 좌표)을 마우스로 클릭해야 합니다.
<Pick> 버튼
현재 선택된 Stick Feeder로부터 부품흡착을 합니다. 이 때, 부품을 흡착할 헤드
(Device)를 미리 선택하여야 합니다. 흡착(Pickup) 이 성공적으로 이루어지면 다
음과 같은 대화상자를 표시합니다.
자세한 내용은
“
8.1.1 Feeder Base
”
의 <Pick> 버튼을 참조하시기 바랍니다.
<2Pt. Teach…> 버튼
Stick Feeder의 흡착점을 Teach할 때, 부품이 담긴 Pocket의 대각선 모서리 2점을
Teach해서 중심점을 구하는 기능을 수행합니다. 자세한 내용은
“
8.1.1 Feeder
Base
”
의 <2Pt. Teach…> 버튼을 참조하시기 바랍니다.
<Offset> 버튼
<Grid>영역에서 선택된 피더의 흡착점에 대한Z축 좌표에 옵셋을 일괄적으로
적용합니다.
8-18
Samsung Component Placer SM471 Administrator's Guide
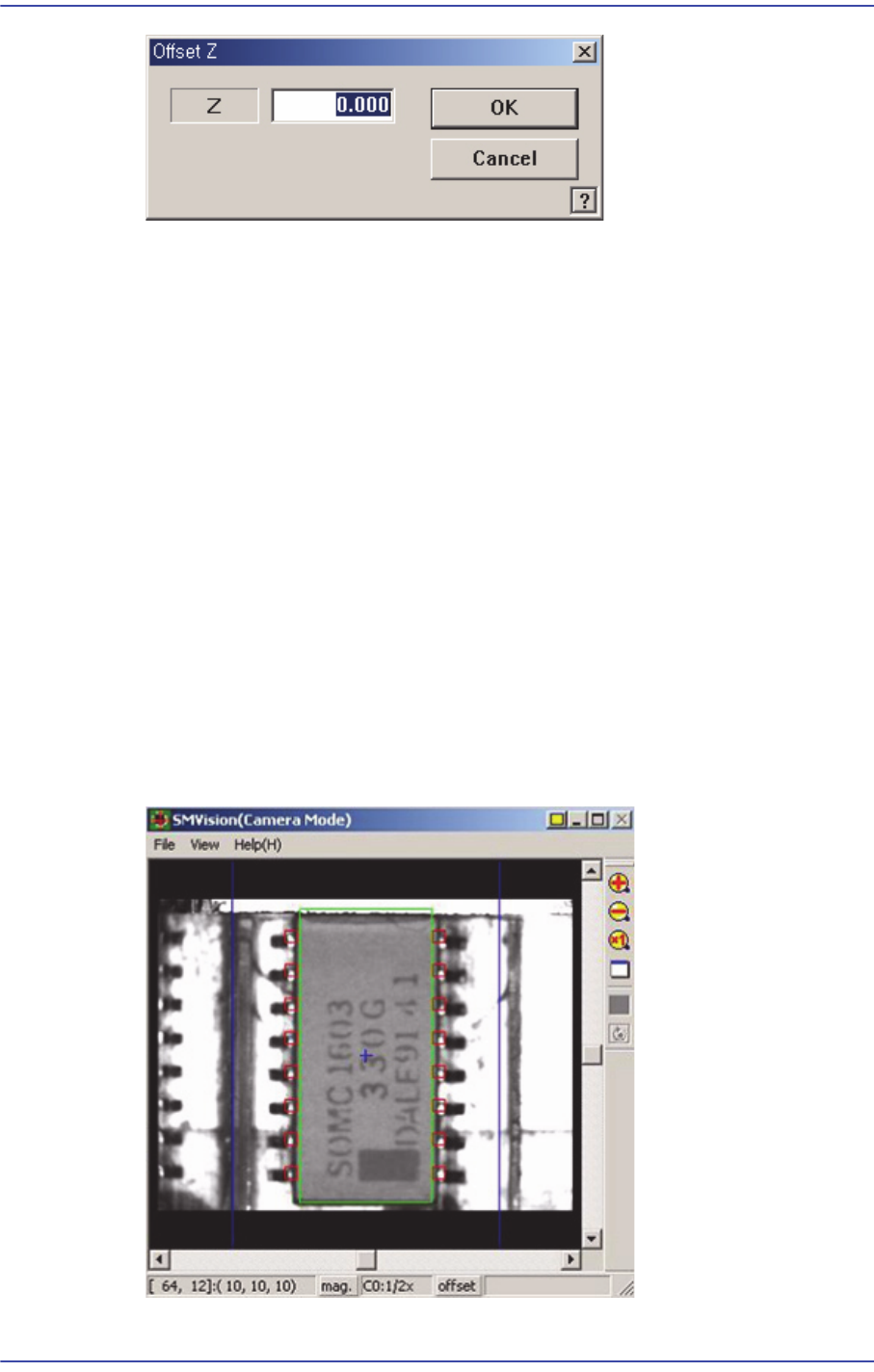
<Z>에디트박스
Offset 값을 입
력합니다.
<OK
>버튼
편집한 내용을 저장
하고 대화상자를 닫습니다.
<Ca
ncel>버튼
편집한 내용을 저장
하지 않고 대화상자를 닫습니다.
<Z
Teach> 버튼
Feeder의 흡착
점에 대한Z축 높이를 공압을 이용해 자동으로 측정합니다. 티칭
하려는 피더의 부품(피더의 흡착점)을 선택하고 티칭을 수행할 헤드를 <Teach>
영역의 <Device> 콤보박스에서 선택하십시오. 그리고, 선택된 헤드의 노즐 홀더
에 CN040노즐을 삽입한 후, 이 버튼을 클릭하십시오.
<P
art Outline> 체크박스
이 체
크박스가 선택된 경우, 흡착위치를 확인하기 위해서 Fiducial Camera를 해
당 피더의 흡착위치로 이동하면, SMVision 창에 해당 부품이 흡착되어지는 각
도를 감안한 아웃라인 이미지를 보여줍니다.

8-19
공급장치
설정
<Display> 버튼
실제 피더베이스상에 설치된 피더의 형상을 그림으로 보여줍니다.