SM411 Service Manual(CHI).pdf - 第123页
Calibration 3-69 5. 利用 T eaching Box 料袋中心对准 Vi s F r a m e 窗显示的 Fiducial Camera 的十字线 后,点击 <Get> 按钮把选定的当前坐标值输入到选择的编 辑框中。 6. 同样的方法,在后面 F eeder Base 的 21 号槽设置喂料器后进行示教。
Samsung Component Placer SM411 Service Manual
3-68
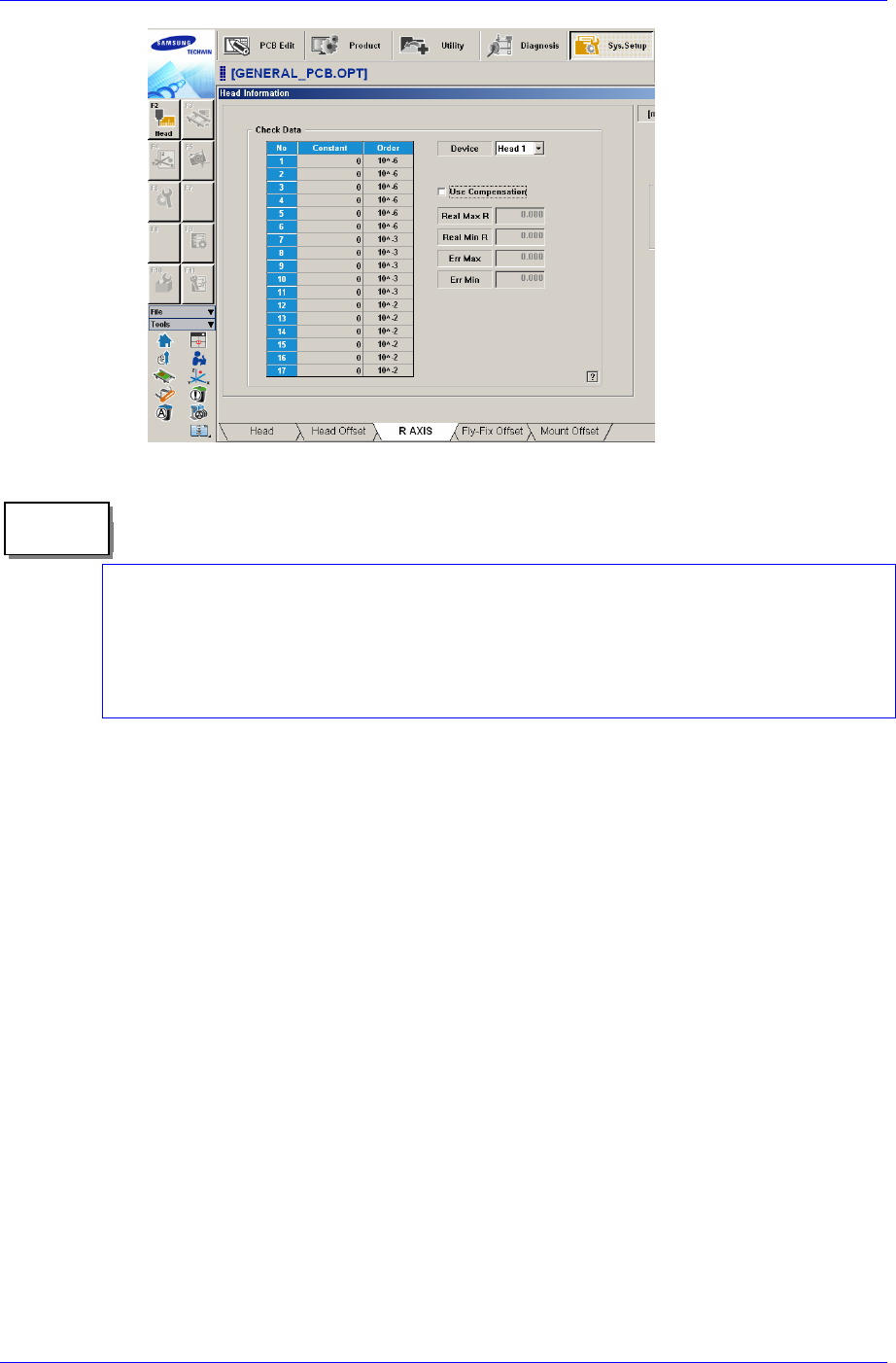
R-轴偏移的校正基准值如下。
Real Max(Min): 命令值与测定值之间的最大(最小)误差
Head1~Head6 : -0.500 ~ 0.500(deg)
Err Max(Min) : 测定值与补偿值之间的最大(最小)误差
Head1~Head6 : -0.200 ~ 0.200(deg)
3.3. Feeder Base Origin 设置
示教喂料器原点寻找全喂料器吸附位置时实施的过程。如果该过程不按照要求执行
时就发生吸附错误。
利用8mm Tape Feeder设置Feeder Base原点方法如下;
1. 把最小的部件(0603, 1005)Rell贴装在喂料器后设置在前面Feeder Base的 21号
槽。 Feeder设置钱,请确认 Feeder Base上面有无废弃的部件,如果有请除去
废弃部件。
2. 用鼠标选择<第21 8mm站位吸取点> 编辑框后,在 <示教>领域的组合框中选
择 ‘大型凸轮’。
3. 请点击<Move> 按钮把Fiducial Camera移动到设置在前面feeder base的21号槽
的带式喂料器的吸附点。
4. 请利用Fiducial Camera示教带式喂料器的吸附点。此时,如下图所示示教中心
点。此时,该示教不是部件中心的料袋(pocket)中心点
"
메모
" 备注

Calibration
3-69
5. 利用Teaching Box料袋中心对准VisFrame窗显示的Fiducial Camera的十字线
后,点击 <Get> 按钮把选定的当前坐标值输入到选择的编辑框中。
6. 同样的方法,在后面Feeder Base的21号槽设置喂料器后进行示教。