SM411 Service Manual(CHI).pdf - 第484页
Samsung Component Placer SM41 1 Service Manual 13-6 LED2 的 点灭次数 略字 警告编码 (hex) 警告内容 修复可能与否 6 ORG 09 零点复位运转失败 可能 无法修复的警告改善警告原因,重新连接电源后复位系统运转。 表 13-3. 解决 Conveyor Suttle, Width 及 Rail 轴马达问题 Alarm content Cause Corrective m …
Motor Driver
13-5
Alarm
Code No.
Alarm内容 运行状态 原因 对策
不良或异常发生
99
其他
异常alarm
控制电源投入后
主电源投入后
电动机运行中
y 噪音引起的控制电路误
动作
y 放大器自我诊断功能ala
rm
y 关闭电源后重新
打开后确认
y 继续发生时替换
伺服放大器
上表中Alarm Code No. 旁边记入 “ * “符号的Alarm是不能Clear的Alarm,安
全关闭设备电源后重新打开电源时正常情况下Alarm被解除.
伺服放大器内部的控制电路因过大的噪音等因素误动作时可能如下标示Alarm
Code.
此时, 立即关闭电源后确认电缆配线状态及F.G(Frame Ground)的连接状态等.
如果发生上表中没有的Alarm Code,通过专用程序重新输入伺服放大器参数后
关闭电源,然后重新打开电源确认有无异常.
采取上述3号措施后仍然发生Alarm时,这种情况大部分是放大器破损引起的,
请替换伺服放大器.
13.2.2. Conveyor Suttle ,Width 及 Rail轴
本产品贴装了提示扩音器自身警告状态的LED可即时确认是否发生故障。 故障原
因可通过 LED的点灭次数或PC I/F的警告编码确认。 以下是故障原因及修复措施
事项。 无法修复正常状态时请与本公司联系。
表
13-2 Suttle, Width
及
Rail
轴
Alarm code
LED2的
点灭次数
略字
警告编码
(hex)
警告内容 修复可能与否
不点灯 无警告 00 - -
CPUE - CPU 故障 不可能
继续点灯
EEPER 10 非挥发性存储器运转 不可能
1 DE 01 传感器开放电路 不可能
OV 02 供给电压超过参数的规定值 可能
2
MPE 03 03 供给电压在参数规定值以下 可能
3 RSTE 04 初始化动作失败 不可能
OVF 05 位置变差过大 可能
OL 06 伺服故障 (8S停止) 可能
4
OS 07 过速 可能
5 RGOL 08 再生电压超过参数规定值 可能
注意
Samsung Component Placer SM411 Service Manual
13-6
LED2的
点灭次数
略字
警告编码
(hex)
警告内容 修复可能与否
6 ORG 09 零点复位运转失败 可能
无法修复的警告改善警告原因,重新连接电源后复位系统运转。
表
13-3.
解决
Conveyor Suttle, Width
及
Rail
轴马达问题
Alarm content Cause Corrective measure
CPUE
y 供给电压下降
y CPU发生故障
y 确认供给电压是否在参数规定值以
内。
y 替换扩音器
DE (传感器开放电
路)
传感器开放电路或者接触故障感知
y 确认传感器接线
y 替换扩音器
OV (过电压) 扩音器供给电压超过参数规定值
扩音器供给电压修复为参数规定值以
内
MPE (供给电压下降) 扩音器供给电压不到参数规定值
扩音器供给电压修复为参数规定值以
内
RSTE (复位失败) 无法正常完成复位动作 确认负荷状态
OVF (过大变差)
过大偏差设定值过小
由于过度的马达锁定发生过度振动
确认设置
负荷状态及参数确认
确认制动器解除功能及制动器机械
OL (伺服故障)
感知马达非正常 8S 停止无法到达目标
位置的状态
感知移动路径上的障碍物
y 确认有无障碍物
y 驱动中确认与机械端口等是否有碰
撞
y 确认电源电缆是否开放
OS(过速)
马达的旋转超过容许的限制速度。
感知速度:固定在 5400 min
-1
检查设定的命令后调整负荷状态和每
个参量
RGOL(再生失败) 马达运行中马达的再生电压超过规定值 确认参数和负荷状态。
ORG(零点复位失败) 开放传感器的区间C 电路 检查传感器电缆连接状态。
EEPER(存储器错误)
发现存储器错误时参数初始化为工厂装
船前的状态值。
初始设置所需时间为1秒
如果电源供给中断1秒以上或重新连接
时发生同样的警告则需要替换马达。
如果系统复位,则需要重新设置用户
复位参数。
Motor Driver
13-7
13.2.3. Servo Motor Driver Trouble 检点事项
13.2.3.1. 驱动器异常发生时 sequence
异常发生 -> Dynamic Breaker / 电动机通电状态 / Servo 输出 / Alarm输出 ->
Dynamic Breaker 解除顺序进行。
这 Sequence启动时电动机将停止发生Alarm。
13.2.3.2. Trouble 状态与处理次序
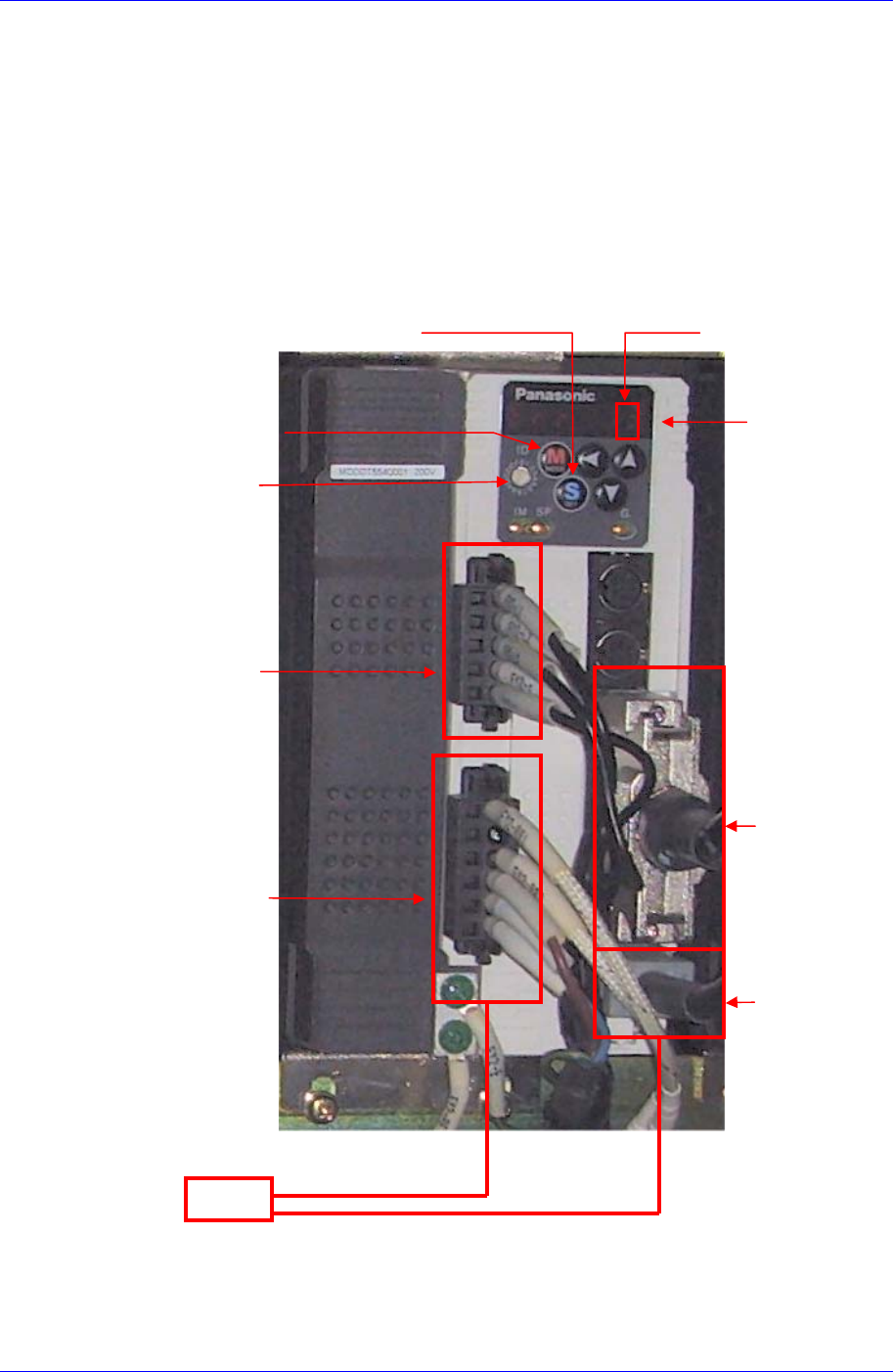
ID Switch
Input Power
Ping Check!
Motor Power
Pin Check!
Earth Check!
Interface
Check!(From
Drive to Axis
Board)
Motor Encorder
Cable
Connetciotn/
Pin Check!
Parameta
Setting
Check!
MODE Switch
SET Switch
Alam Code Check!
Motor
Motor Noise / Mechanical Trouble / EMG Switch Check!