YV100II维修手册.pdf - 第19页
第 三章 调整 3 - 1 1 l 真空发生器的 检 查项目 检查项目 描述 吸嘴头低位 检 测 检查各 头 下 降是否 平 滑 真空发 生 器 检查 真空发 生 器 是否 提供 足 够 真空度 真空传感 器 功能 检查 真空传感 器显示 真空度级别是否 正确 。 l 工作头部分的 机 器数据 设置 检查项目 描述 位 置(机器 坐 标 ) 此 坐 标 包 括相 对 于机器 原点 的定 位销 及 甩料位 置 坐 标 。 拾 取 / 贴 …
第三章 调整
3-9
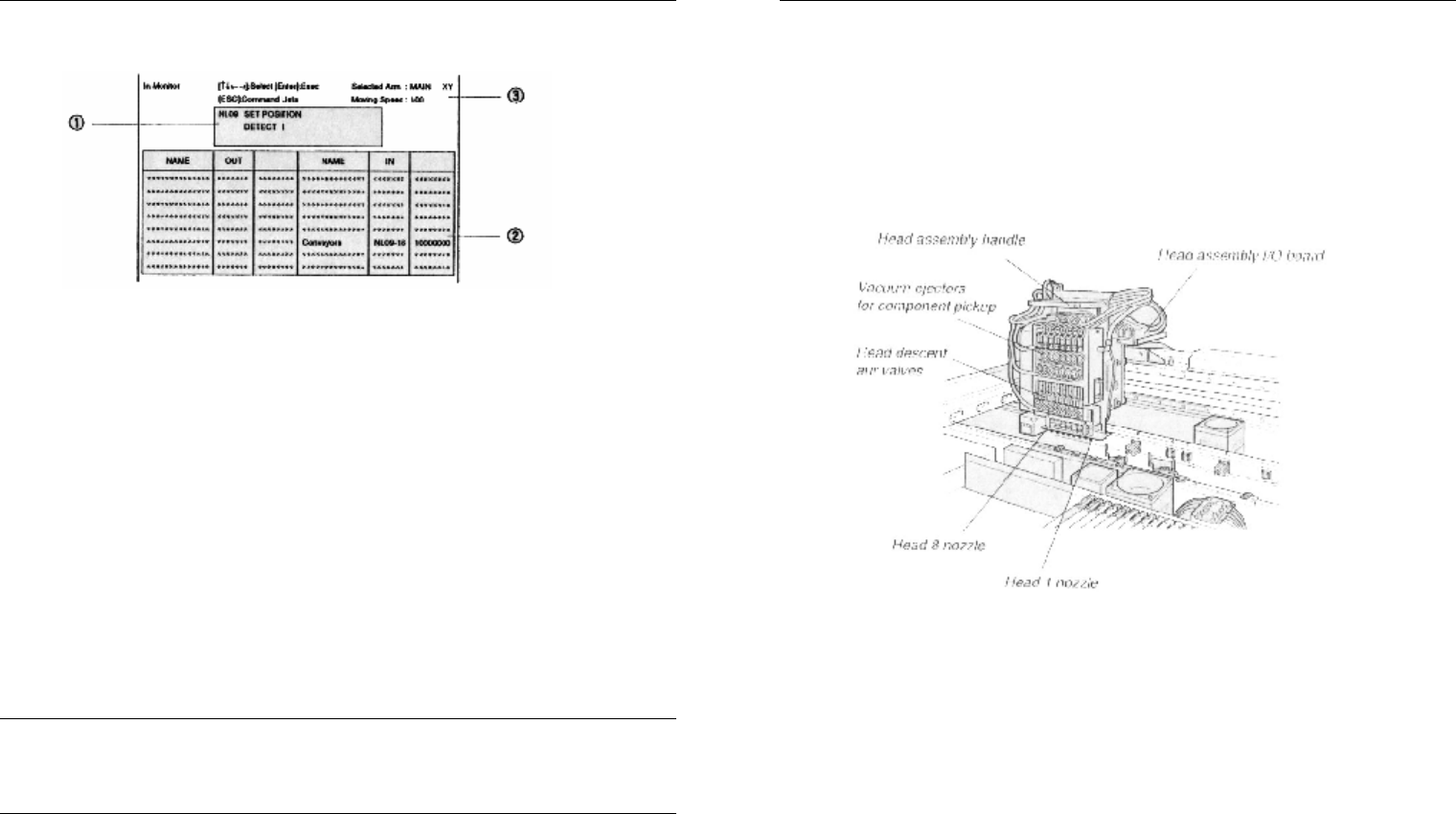
l 输入监示屏幕
1) 说明窗口
输入及输出信号以代码名称表示如“TN01”与“NP09”,说明显示在浅
兰色框中,表明所指项目的解释及“0”与“1”所代表的含义。
2) 数据输入/输出信号状态
每个 I/O 信号的状态以二进制数据代表(1与0), 例 如,前一页的输出
监示屏幕表明主挡块打开(升起),以上的输入监示屏幕表明贴装位置的 PCB
传感器检测到有板。使用方向键,移动光标至需要检查或操作的项目上。可
按[TAB]键在输入及输出窗口之间切换。
每次在输出监示窗口按回车键时,选定的项目进行一次开关动作。在输
入窗口,可检查传感器的检测状态。
3) 选定的轴与移动速度
在输入或输出监示窗口的右上角显示的是调整过程中选择的轴与移动速
度。这些轴与移动速度可通过按 YPU 上的[SEL AXIS]或[AXIS GROUP]及
[SPEED]键,或<3/4/A1 SELECT AXIS>与<3/4/A2 RUNNING>命令来完成。
注意
为了检查机械与电气操作需经常打开输出与输入监示屏幕时,确保熟悉
此部分的操作。
第三章 调整
3-10
1. 工作头部件
YV100II 机器的工作头部分包括 8 个在线吸嘴头(头 1-8)。 每 个 头 的上
升/下降操作与真空发生器必须正确调整以保证元件拾取与贴装动作的准
确。此部分说明了如何检查,调整及优化气动部件的移动情况,真空发
生器与工作头部分的机器数据。
l YV100II 的工作头总成
第三章 调整
3-11
l 真空发生器的检查项目
检查项目 描述
吸嘴头低位检测 检查各头下降是否平滑
真空发生器 检查真空发生器是否提供足够真空度
真空传感器功能 检查真空传感器显示真空度级别是否
正确。
l 工作头部分的机器数据设置
检查项目 描述
位置(机器坐标) 此坐标包括相对于机器原点的定位销
及甩料位置坐标。
拾取/贴装真空度 基准真空度值用于判定各头是否拾取
及贴装元件
R-轴精度偏差 各吸嘴轴旋转时的角度偏差
吸嘴校正 用于校正 180°时的吸嘴轴偏差。
工作头偏差 2-8 头相对于 1 头的位置坐标
工作头下降偏差 工作头上升位置与下降位置的偏差。
第三章 调整
3-12
1.1. 检查工作头
检查工作头气动工作部件与真空发生器,按以下步骤继续。
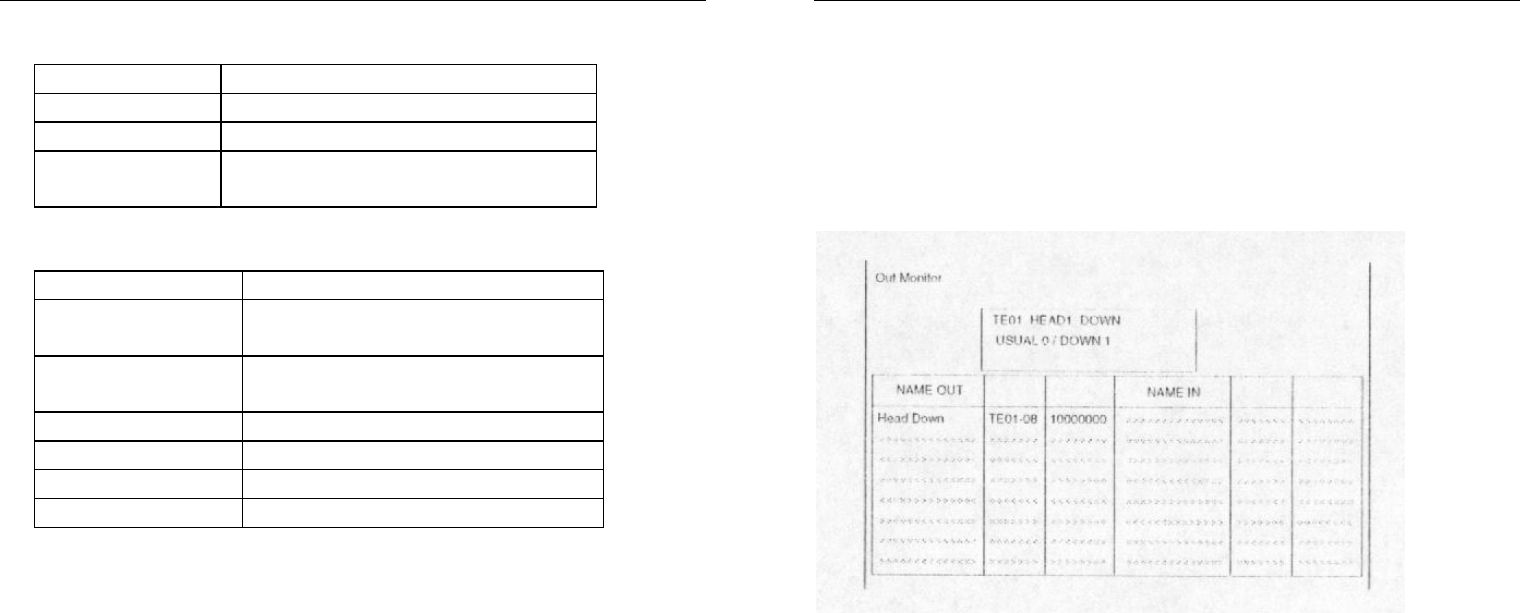
1.1.1. 检查工作头上升/下降移动与低位检测
第一步 打开输出监示模式并选定目标工作头。
1) 选择<3/4/C1 OUTPUT MONITOR>并按回车键。
2) 使用方向键移动光标至“TE01-08”(工作头下降)
第二步 按回车键检查选定工作头的上升/下降。
输出信号当工作头下降时显示“1”,上升时显示“0”。
第三章 调整
3-13
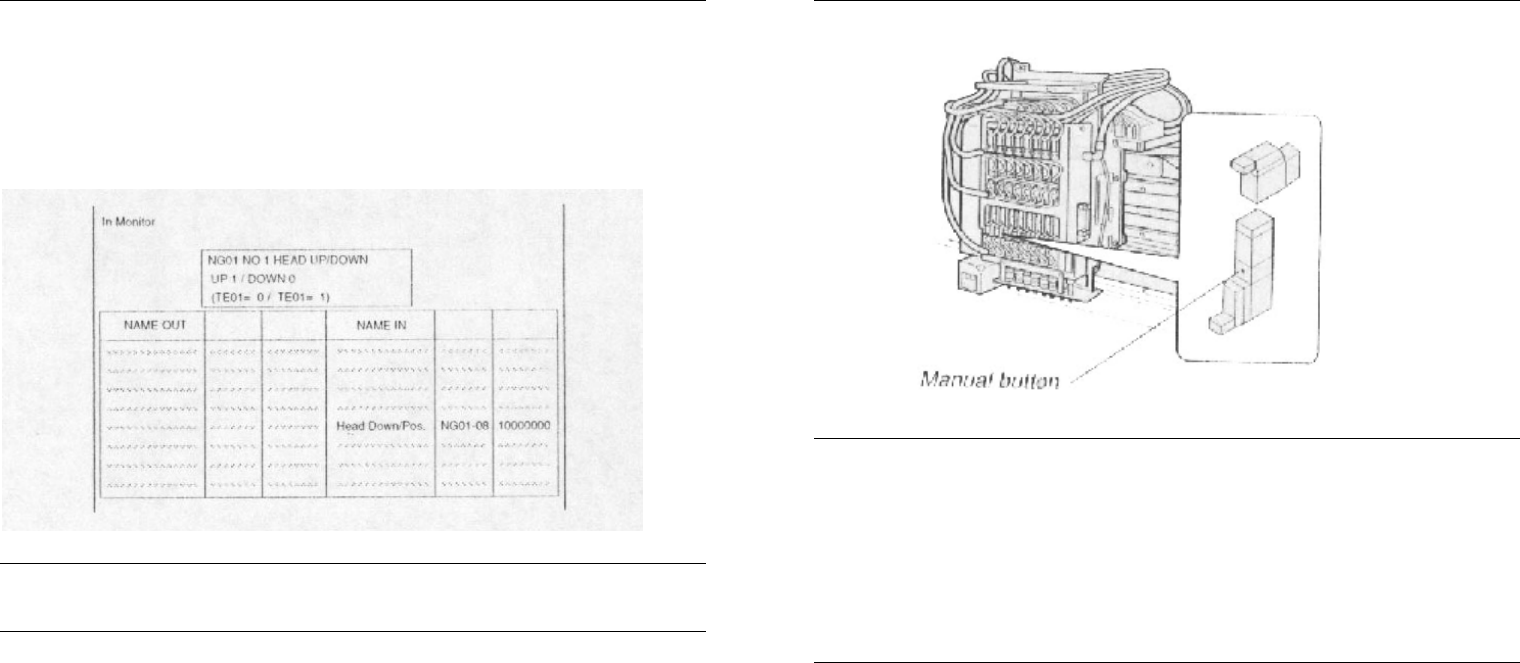
第三步 检查低位传感器的输入状态。
1) 按[TAB]键由输出监示模式切换至输入监示模式。
光标移动至相应的工作头号“NG01-8”。
2) 检查工作头低位传感器的输入状态是否匹配工作头的上升/下降动作。
输入监示模式在工作头下降时显示“0”,在上升时显示“1”。检查各头
传感器的输入状态。
参考
工作头低位检测传感器为常闭类型以保护工作头避免可能的损坏。
第三章 调整
3-14
l 工作头下降气阀
参考
如果真空产生工作不正常,不使用输出监示屏幕检查操作:
l 按急停键
l 用尖的改锥或有尖的相似工具按气阀上的手动键以产生真空
如果此方式可行,说明气阀的电气部分可能损坏。检查以下位置。如连
接器断开,电磁线圈断裂,联接器无动力,DC24V 供给错误,I/O 板输出错
误,气源供给错误,气管或吸管阀门损坏。检查真空发生器供气管。