YV100II维修手册.pdf - 第43页
第 三章 调整 3 - 59 3. 光 学 系统 Y V 100 II 标 准 模式机器使用 移动 镜 头 以 识 别 P CB 基准 标 记 ,使用 一个 线 性影像 传感 器( 称为 复合 光 学镜 头 )以 识 别元 件, 另 外 , 当 机器 安 装 了 可选 单光 学镜 头 , 则 可 识 别 更 大 范围 的 元 件 类 型 。 l 光 学 系统 类 型 移动 镜 头 用于 识 别 P CB 标 记 (如 基准 标 记 ) …
第三章 调整
3-57
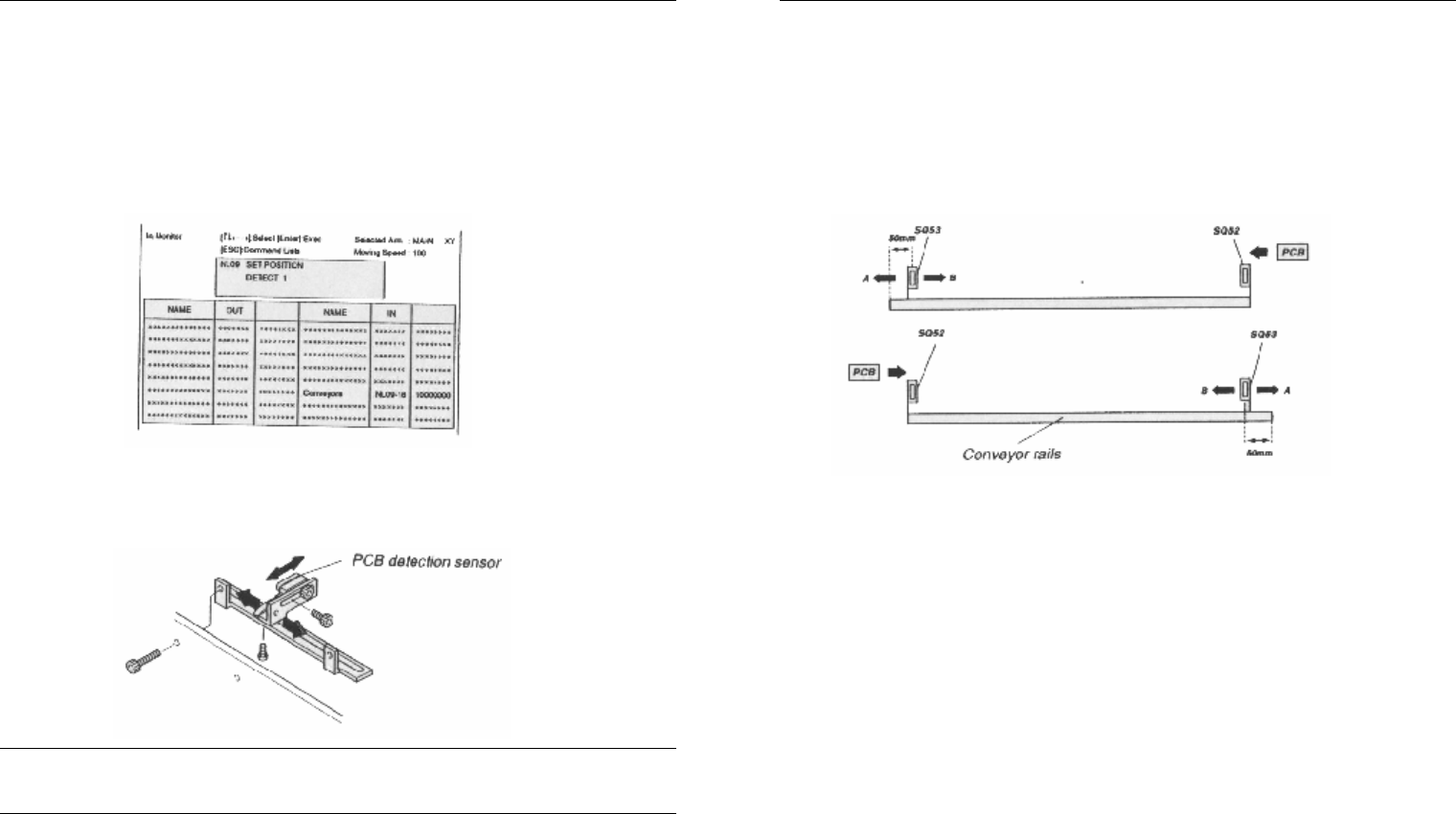
第四步 打开输入监示屏幕检查传感器检测状态。
1) 选择<3/4/MANUAL>-<C2 INPUT MONITOR>并按回车键。
2) 使用方向键移动光标至“NL01”至“NL04”或“NL09”。
输入监示屏幕当检测到 PCB 时,数 字 显示“1”,没有检测到 PCB 时,
数字显示“0”。检查各传感器数字是否会显示“1”。同时检查当定
位销及支撑平台升起时“NL09”不会变化。
第五步 必要时调整 PCB 检测传感器。
松开传感器固定螺钉,调整安装位置,方向或角度。
调整 PCB 检测传感器的位置
注意
当 PCB检测传感器位置调整时,检查其位置不要处于拼板 PCB的连接处。
第六步 从传送带上取下 PCB。
第三章 调整
3-58
2. 检查机器之间的 PCB 传送。
在标准机器配置中,传送带入口传感器连接于传送带边缘而出口传感连
接于距离边缘 50mm 处。通常位置适用于各种 PCB。然而,使用实际贴装的
PCB 时,检查在上线机器与下线机器之间是否平稳传送。
l 传送带入口与出口传感器位置
当使用以下 PCB 时调整出口传感器(或其他传感器)。
PCB 短于 50mm:
向传送带边缘移动传感器以匹配 PCB 长度。
有切口的 PCB
如果传感器在切口处变灭,PCB 则不能平稳传送。此时,尝试调整传送
延时。
如果导致出口传感器误检测,调整出口传感器位置以避免误测。对于变
化尺寸,推荐使用双出口传感器或照明度不同的出口传感器。(具有较宽测量
范围)。
较 重 的 PCB(主板等等)
慢慢降低传送带速度或向机器内部方向调整出口传感器位置使 PCB 在到
达传感出口边缘之前停止。
第三章 调整
3-59
3. 光学系统
YV100II 标准模式机器使用移动镜头以识别 PCB 基准标记,使用一个线
性影像传感器(称为复合光学镜头)以识别元件,另外,当机器安装了
可选单光学镜头,则可识别更大范围的元件类型。
l 光学系统类型
移动镜头 用于识别 PCB 标记(如基准标记)
复合镜头 用于识别元件(如片状元件)
单光学镜头 用于识别元件(如 QFP)
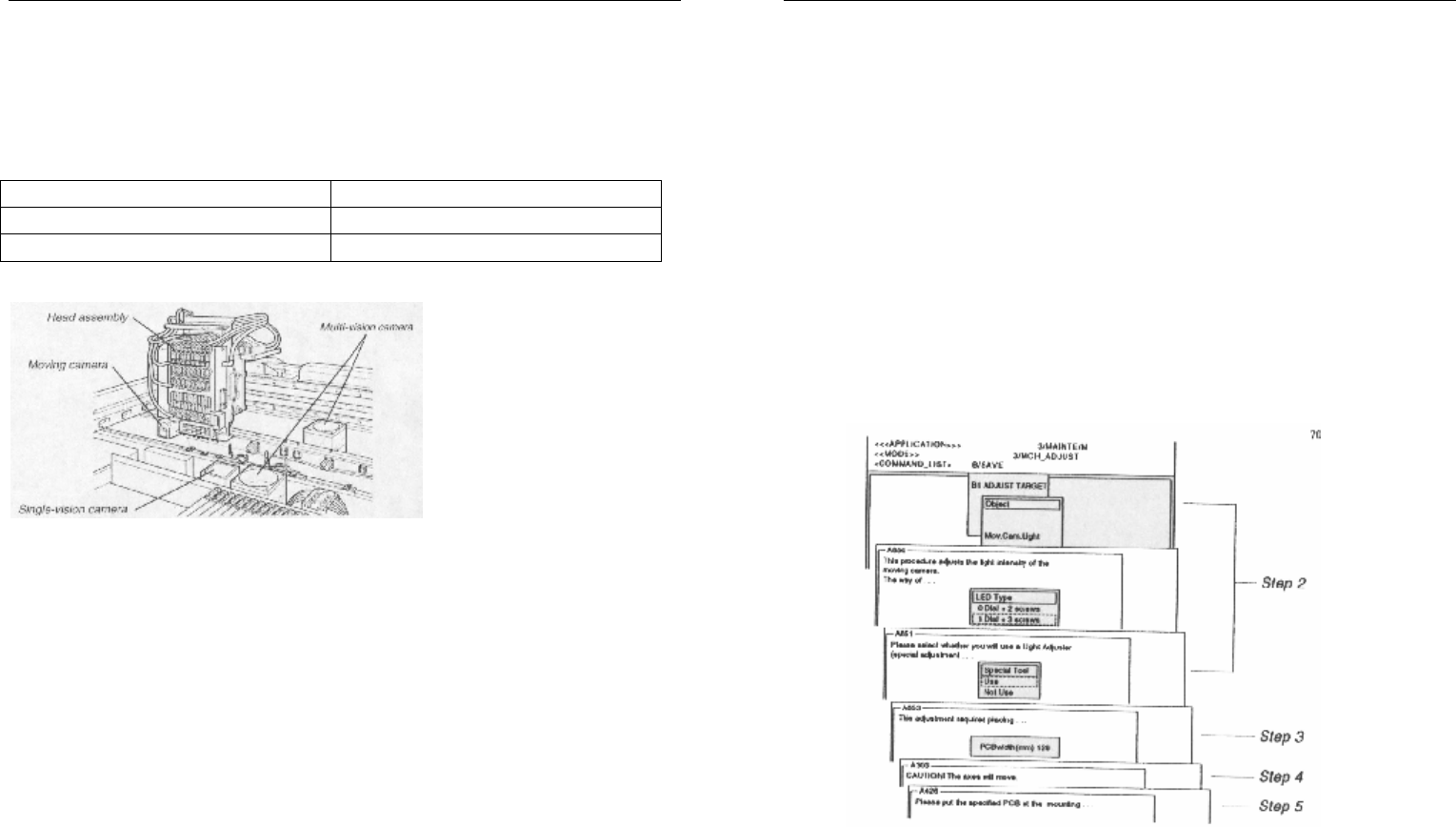
l 工作头上安装的光学系统
第三章 调整
3-60
3.1. 移动镜头
移动镜头位于工作头上用于识别 PCB 基准标记及示教。照明度及移动镜
头放大比例可调。
3.1.1. 调整移动镜头发光度
为准确识别 PCB 基准标记,移动镜头的发光度必须优化。欲进行此调整,
应使用可选的定制工具(照明度调整板:KM1-M8806-000)。
第一步 准备发光度调整板。
准备发光度调整板(为 YAMAHA 选件)及合适的 PCB 以放置调整板。
可以使用无基准的 PCB。
第二步 执行“Mov.Cam.Light”命令。
1) 选择<3/3/B1 ADJUST TARGET>-“Mov.Cam.Light”并按回车键。
2) 选择“1 Dial + 3 screws”。
3) 选择“Use”以使用专用工具。
第三步 输入 PCB 宽度并按回车键。
输入宽度(毫米)并按回车键。
第三章 调整
3-61
第四步 确保安全,按回车键。
W 轴移动至指定传送带宽度。
第五步 按下急停按钮,固定 PCB 并放置调整板。
调整定位销与支撑销位置以匹配 PCB。对齐定位销于定位孔的中心。使
调整板位于 PCB 的中心,双色表面向上。
第六步 当 PCB 放置于传送带上后取消急停。
确保安全,松开急停按钮,按 YPU 的[READY]按钮。
第七步 确保安全,按回车键。
升起定位销与支撑销固定 PCB,移动工作头至 PCB 上方。至调整板显示
于示教屏幕上。
第八步 调整镜头位置
当操纵 YPU 摇杆,调整移动镜头的位置使调整板的亮灰色区显示于整个
视野。
第九步 当镜头定位后按回车键
第十步 按急停按钮,根据提示调整移动镜头的照明度。
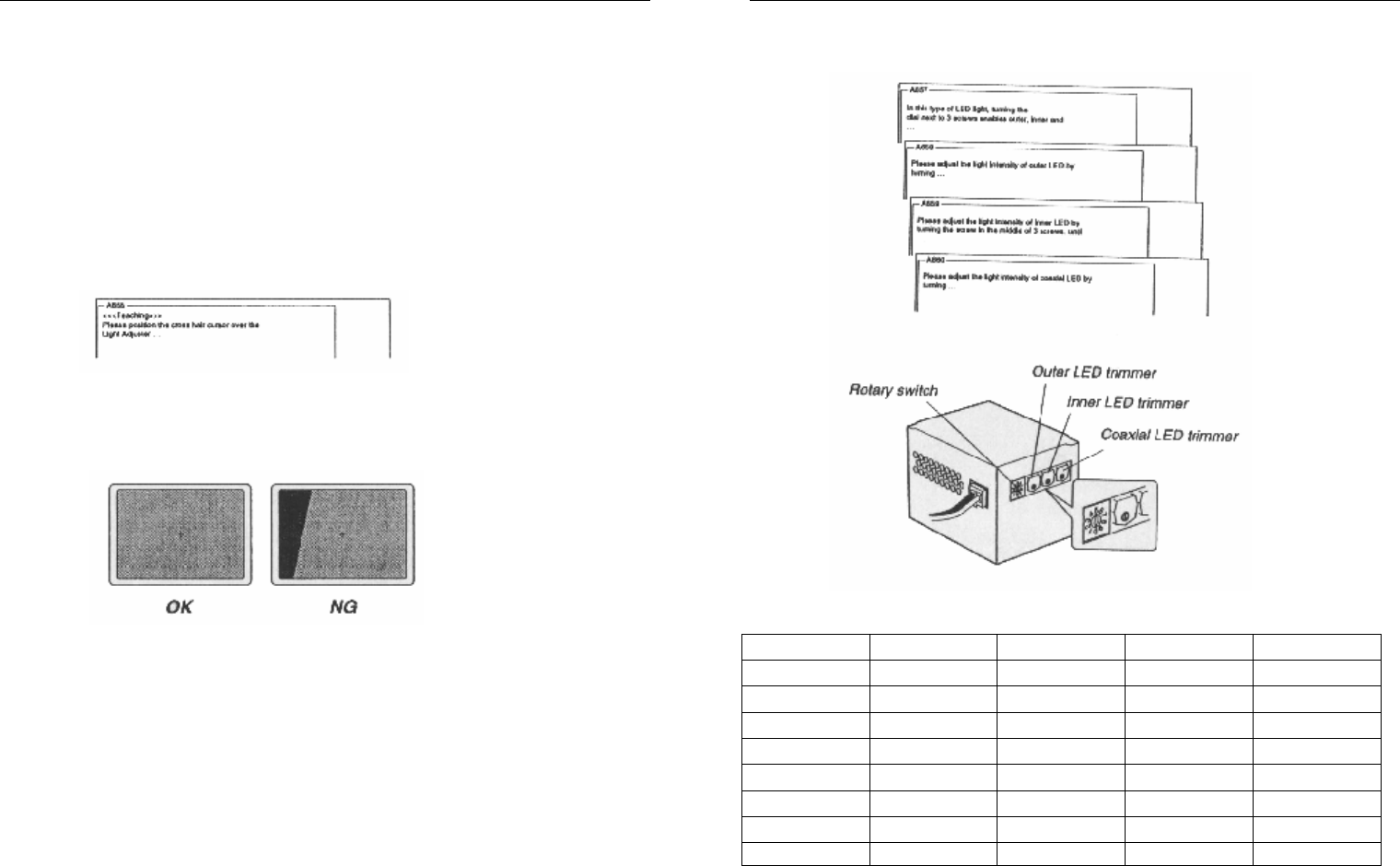
移动镜头照明方式分为三部分(外部,内部,同轴),通过使用 LED 微
调旋钮与照明方式调整旋钮调整各部分发光度。
三个 LED 微调旋钮位于移动镜头的侧面,以调整外部,内部及同轴照明
区。照明度通过右旋微调旋钮以增加亮度,左旋以减小亮度。调整各微调旋
钮使操作显示器右下角的“AveGrayLevel”至以表所需数值。
第三章 调整
3-62
l 调整移动镜头发光度
l 移动镜头照明方式与优化设置
旋转开关 外部 中部 内部(同轴)
优化照明度
0
〇 〇 〇 正常照明
1
〇 〇
-
2
〇 〇
-
3
〇
50±5
4
〇
〇
5
〇
50±5
6
〇 50±5
7 -