YV100II维修手册.pdf - 第72页
第 三章 调整 3 - 1 17 6.3. 软 限 位 当轴移动 时,软 限 位 用于 限 制 移动 范围 以 避免 与 各机械 挡块 碰撞 。如 果 目的 位 置 超 出 软 限 位 时, 错误 信息 “ A X I S S O F T L I M I T O V ER ” 将出现并 禁 止 机器 移动 。 在手动 模 式,可 使用 Y PU 操 纵 工作 头 在 软 限 位 以 内 移动 。 6.3.1. 调整 W 轴 软 限 位。…
第三章 调整
3-115
第四步 缓慢向回移动工作头以寻找第二限位。
当获得屏幕底部的 X 轴坐标之后,检查第二限位传感器激活位置(屏幕
左下方信息变回“EMERGENCY STOP”)的 X 坐标。当此坐标为第三步所记
的硬限位坐标向内 1.00mm。则无需调整。如果不同,按以下步骤调整。
参考
当第二限位传感器激活时,可听到轻微的卡嗒声及屏幕左下方信息变回
“EMERGENCY STOP”。
在紧急停止状态下,用手旋转 X 轴电机联轴器可以精细移动工作头。
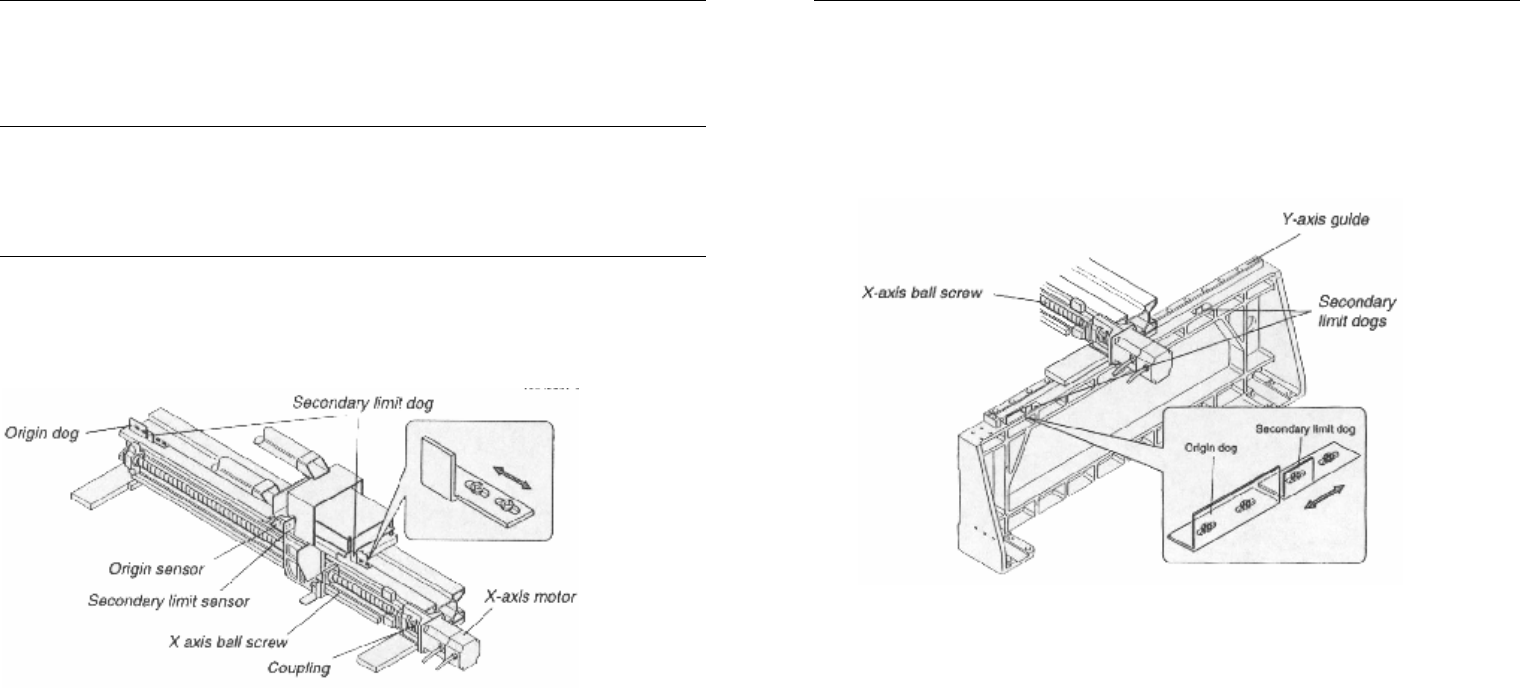
第五步 移动工作头远离第二限位挡块,松开挡块固定螺钉。
第二限位挡块在 X 轴导臂的两端上方固定。轻微松开第二限位挡块螺钉
以滑动挡块(不要取下)。
l X 轴第二限位传感器与挡块
第六步 调整第二限位挡块的位置
滑动第二限位挡块至第四步所检测的距离。使用与第四步相同过程。确
保第二限位位于硬限位内 1.00mm。
作第二限位坐标记录为设置软限位所用。
第七步 锁紧第二限位螺钉。
第八步 使用相同过程以调整其他第二限位。
在调整完成后,用手移动工作头至正常移动范围之内。
第三章 调整
3-116
6.2.2. 调整 Y 轴第二限位挡块
与 X 轴第二限位相同。通常 Y 轴第二限位设定于机械挡块(硬限位)内
侧 1.00mm。其他调整与 X 轴调整完全一致。以下为 Y 轴第二限位挡块位置。
l Y 轴第二限位挡块
第三章 调整
3-117
6.3. 软限位
当轴移动时,软限位用于限制移动范围以避免与各机械挡块碰撞。如果
目的位置超出软限位时,错误信息“AXIS SOFTLIMIT OVER”将出现并禁止
机器移动。在手动模式,可使用 YPU 操纵工作头在软限位以内移动。
6.3.1. 调整 W 轴软限位。
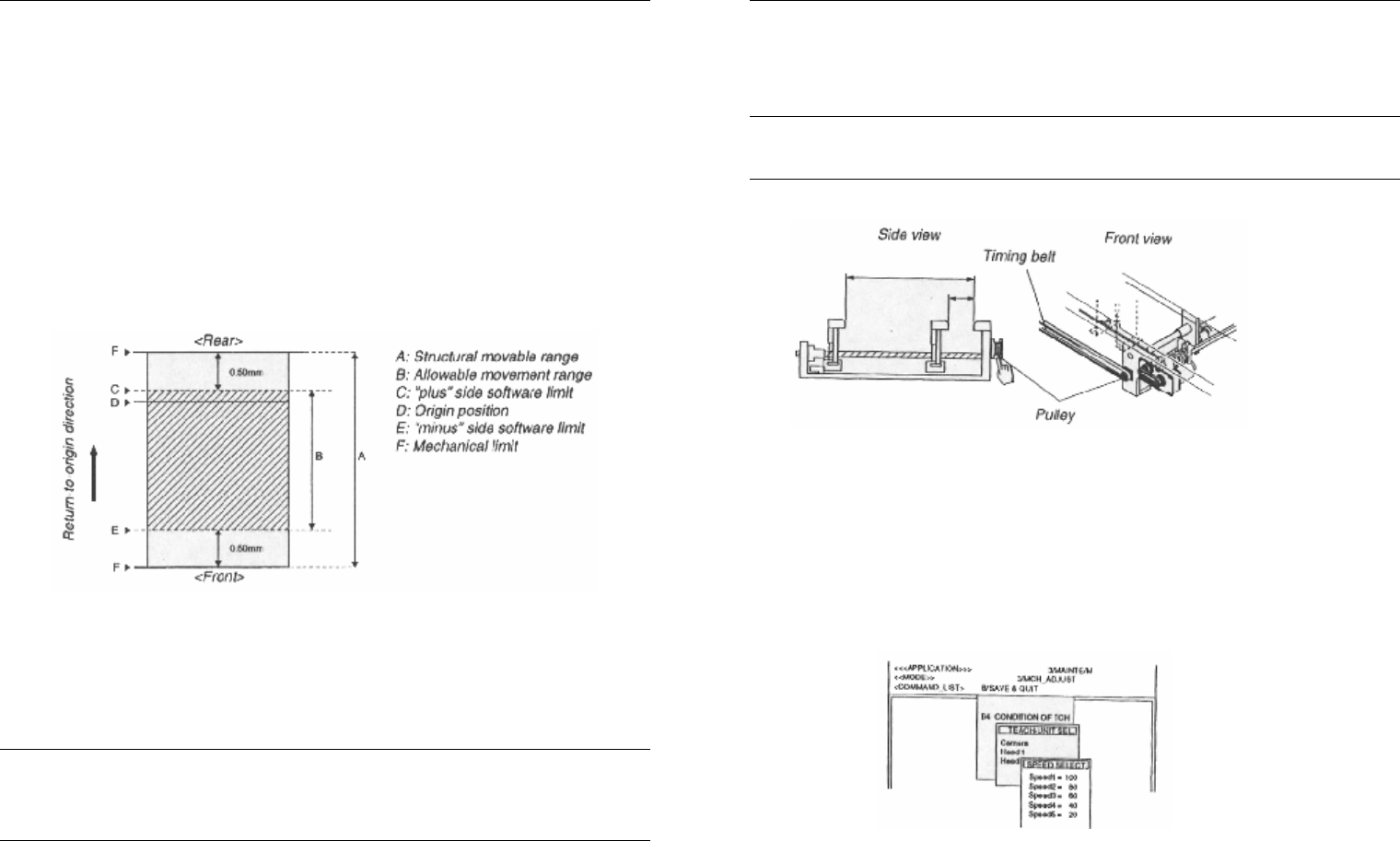
W轴软限位应设置为在正向(加宽方向)和负向(变窄方向)的机械挡
块向内 0.5mm。当软限位设定正确,传送带可传送 50-407mm 的 PCB 宽度。
欲设置 W 轴软限位,使用以下步骤。
l W 轴移动范围
第一步 选择W轴以设置软限位。
选择<3/4/A1 SELECT AXES>-“W/MAIN”并按回车键。
第二步 操纵YPU 摇杆,移动 W 轴宽度
欲设置正向限位,移动 W 轴向加宽方向。欲设置负向限位,移动 W 轴
向变窄方向。
注意
操纵 YPU 摇杆,移动 W 轴尽可能大或小但不与机械挡块接触。(如软限
位设置正确,则移动到此位置即停止)。
第三章 调整
3-118
第三步 按下急停按钮,移动传送带导轨。
用手旋转 W 轴皮带轮与移动导轨接触机械挡块。当移动导轨接触机械挡
块时,最大宽度约为 408.00mm,最小宽度约为 49.00mm。以钢尺或卷尺检查
宽度。
参考
最大与最小传送带宽度根据机器配置而不同。
l W 轴皮带轮
第四步 取消急停
确保安全,松开紧急停止按钮并按 YPU 上的[READY]键。
第五步 设置示教条件
1. 选择<3/3/B4 CONDITION TCH>并按回车键。
2. 选择示教单元并按回车键。
可选择镜头,1 号头与 2 号头。
3. 选择速度级别并按回车键。
第三章 调整
3-119
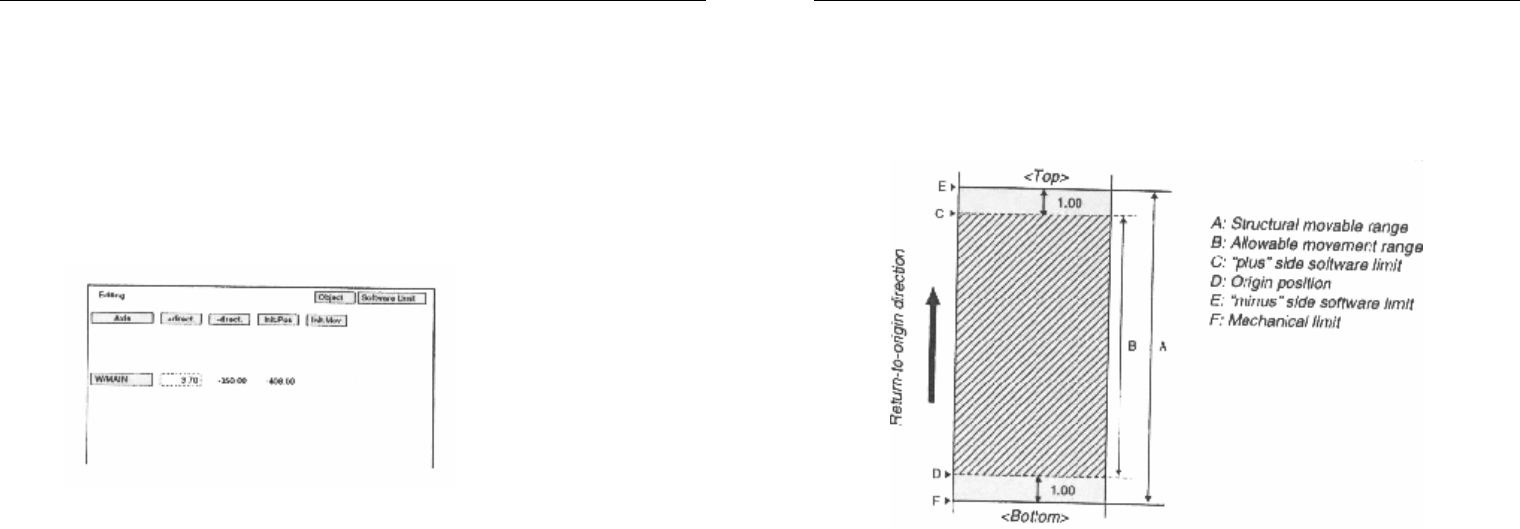
第六步 打开软限位屏幕执行与机械挡块接触位置的位置示教。
1. 选择<3/3/B1 ADJUST TARGET>-“Soft Limit”并按回车键。
2. 使用方向键移动光标至“W/MAIN”行的“+direct”或“-direct”栏。
以上第二步所移动的位置光标应位于“direct”。
3. 按[F10]键两次执行示教。
此参数的数值须更改,因为这是硬限位的坐标值。
l W 轴软限位设置屏幕
第七步 输入软限位
在正向方向输入获得的机械限位数值减去 3.00mm,在负向方向输入获得
的机械限位数值加上 3.00mm。
第八步 保存设置。
按[ESC]键,选择<B2 SAVE DATA>或<B0 SAVE & QUIT>并按回车键。
(如取消保存,可选择<B3 RECOVER ADJUST>或<B7 QUIT>并按回车键。
第三章 调整
3-120
6.3.2. 调整 Z 轴软限位
Z 轴软限位应设为距正负向的机械挡块内 1.00mm 距离处,正向软限位益
不可与换嘴位置干涉。欲设置软限位,按以下步骤。
l Z 轴移动范围
第一步 按急停按钮,并移动 Z 轴
用手上升与下降 Z 轴以接触机械挡块。
升起 Z 轴以调整负方向限位。降低 Z 轴以调整正方向限位。
第二步 取消急停。
确保安全,松开急停按钮,并按 YPU 上的[READY]键。
第三步 设定示教条件。
1. 选择<3/3/B4 CONDITION TCH>并按回车键。
2. 选择示教单元并按回车键。
3. 选择速度级别并按回车键。