YV100II维修手册.pdf - 第34页
第 三章 调整 3 - 41 2. 传 送带 部分 此部分 解释 了用于 固 定 P CB 于贴 装位 置与 P CB 传 送 的 传 送 带 系 统。 2.1. 传 送带 系统 传 送 带 系统 固 定 P CB 于贴 装位 置 并 准 备 贴 装 。 各机 械 部件 沿 传 送 带 导 轨 分 布 并 以气 动 操作 。 此部分 描 述了以 下 机械部 分 的 调 整过 程 。 l 传 送带 系统的 调 整项 定 位销 上 升 / …
第三章 调整
3-39
第七步 确保安全,再次按回车键。
工作头移动至第六步指定的元件拾取位置。
第八步 按下急停按钮,在头上安放 QFP。
在第四步指定的工作头上安放 QFP。( 当 使用矩形 QFP 时,长边要平行
于 X 轴。)
第 九 步 取消急停。
松开急停按钮并按 YPU 上的[READY]键。
第十步 确保安全,然后按回车键。
工作头移动至镜头上方 QFP 以各种角度识别。在校正完成后,结果显示
于屏幕右方。
第十一步 根据操作显示器的信息退出校正。
欲校正其他工作头,重复第二步。
第十二步 保存校正数据。
选择<B2 SAVE DATA>或<B0 SAVE & EXIT>并按回车键。
第三章 调整
3-40
1.5. 吸嘴校准
此参数用于校正当吸嘴旋转至 180 度时的吸嘴轴心偏差。当选择<3/2/A1
SELECT TARGET>-“NozzleCorrection”并按回车键,此偏差的当前设置即显
示。
l 吸嘴校准屏幕
注意
当测试贴装结果为 FINE 模式时,执行贴装反馈后 R 轴精度偏差自动输
入。
1.6. 工作头偏差
此 参 数 为二号头相对于一号头的位置。当选择<3/2/A1 SELECT
TARGET>-“HeadOffset”并按回车键,当前设置即显示。
l 工作头偏差屏幕
注意
因为一号头位置用于基准,故永远设置为“0.00”。
此工作头偏差调整,见本章“7.3 贴装反馈(激光)”。
第三章 调整
3-41
2. 传送带部分
此部分解释了用于固定 PCB 于贴装位置与 PCB 传送的传送带系统。
2.1. 传送带系统
传送带系统固定 PCB 于贴装位置并准备贴装。各机械部件沿传送带导轨
分布并以气动操作。此部分描述了以下机械部分的调整过程。
l 传送带系统的调整项
定位销 上升/下降速度,上下传感器位置
主挡块 上升/下降速度,PCB 接触点
支撑台 上升/下降速度,上下传感器位置
推进销 推进速度,松开速度
(边夹与入口挡块无需调整)
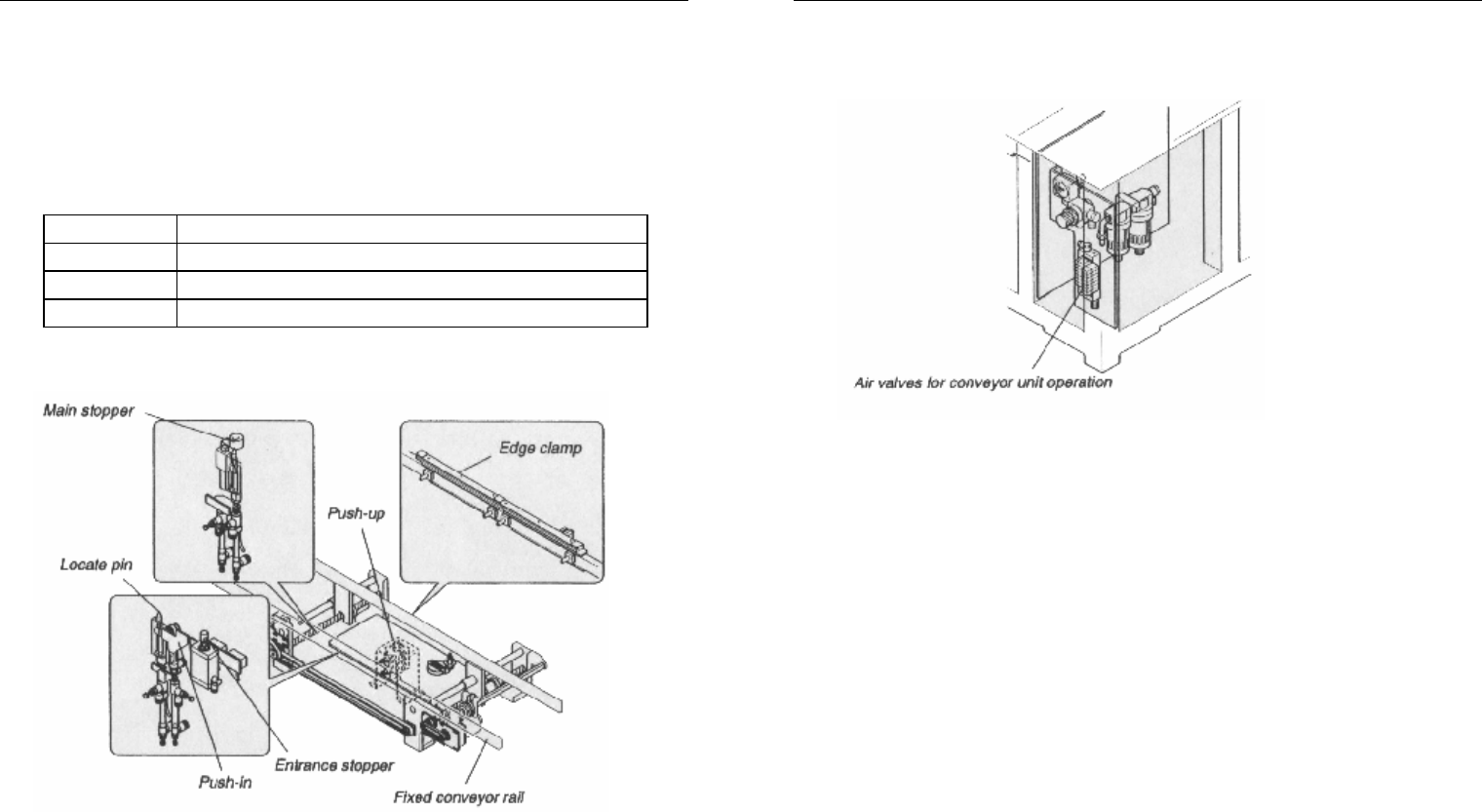
l 传送带系统
第三章 调整
3-42
各传送带系统机械部件的气动阀在机器后部的右下角面板内。
l 传送带系统操作的气动阀
第三章 调整
3-43
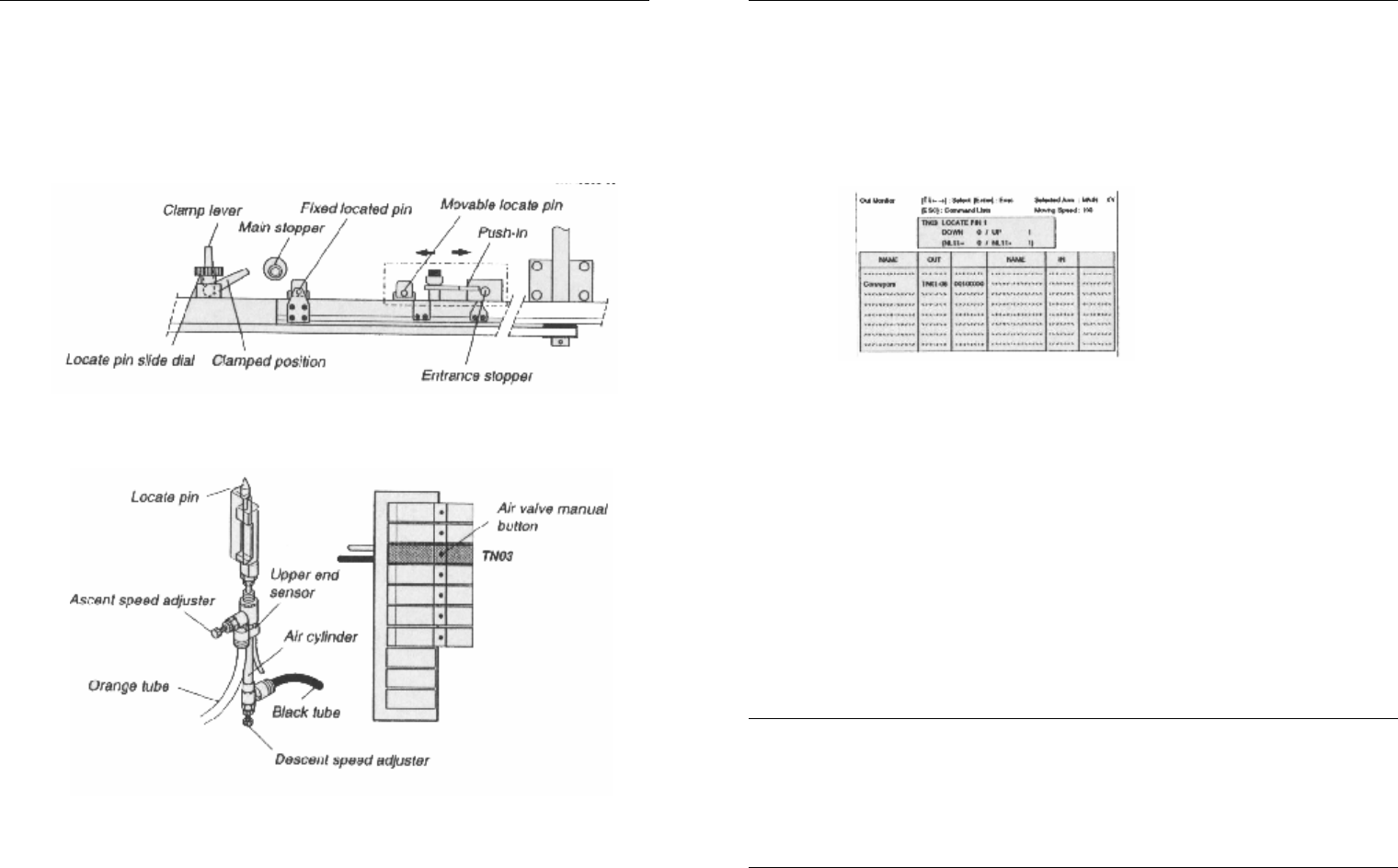
2.1.1. 定位销
沿传送带方向共有两个定位销。一个固定一个可动。这些定位销与 PCB
上的定位孔配合以固定 PCB 并准备贴装。按以下步骤调整上升/下降速度并检
查上升/下降位置传感器动作。
l 定位销分布
l 定位销气动阀与调整旋钮
第三章 调整
3-44
第一步 打开输出监示屏幕操作定位销。
1) 选择<3/4/MANUAL>-<C1 OUTPUT MONITOR>并按回车键。
2) 使用方向键移动光标至“TN03”(定位销 1)。
3) 按回车键改变定位销上升/下降位置。输出监示屏幕“TN03” 当定
位销升起显示“1”,当定位销落下显示“0”。
第二步 检查上升及下降速度
此二速度均应为 1 秒左右(对于已预贴装好元件的 PCB 此速度不会造成
元件偏移)
第三步 按下急停按钮,调整上升/下降速度
松开锁紧螺母,旋转橙色气管的速度调节阀以调节上升速度,或旋转黑
色气管的速度调节阀以调节下降速度。对于调节阀,向左旋增加速度,向右
旋降低速度。固定定位销的上升速度应比可动定位销略快。
第四步 检查上升位置的传感器输入状态
按[TAB]键移动光标至右边的输入监示屏幕的“NL11”。当定位销升起,
数字应变为“1”,下降后应变为“0”。
如果输入监示屏幕数据不能正确显示,根据 PCB 厚度调节气缸上端传感器的
位置。
参考
如果定位销在第一步不能正常工作,则不以输入监示屏幕检查工作情况:
l 按急停按钮。
l 用尖的改锥或有类的类似工具按气动阀的手动按钮(标有“TN03”)以升
起定位销。