YV100II维修手册.pdf - 第23页
第 三章 调整 3 - 19 1.2. 位置 ( 机器 坐 标 ) 在 机器调 整 模式, 当 选 择 < 3 / 3 / B 1 A D J U S T T A R G E T >- “ P o s it i on ” 并 按 回 车 键,以下 窗口 显示 表明 各 部件 相 对 于 机器 原点 的 位 置及 基 本 参 数 设 置。 在 此 屏幕 上,可 执 行示 教 或 编 辑各项 参 数 设置。 此 部 分 描述了如…
第三章 调整
3-17
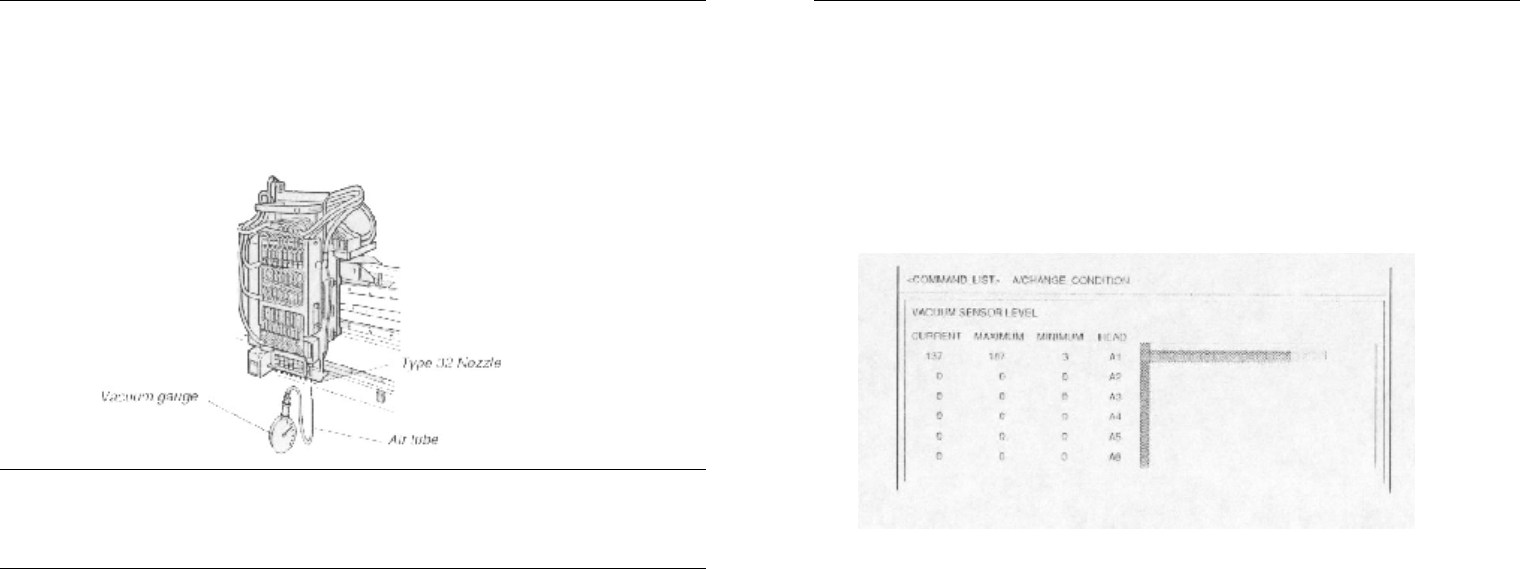
第五步 检查各头的漏气情况
如下图,在工作头上放置一个 32 型吸嘴后连接一块真空表,测量真空压
力(mmHg)。 真空压力为“-500mmHg”或更高时为理想。
l 测量真空压力
参考
如测量的真空压力低于“-500mmHg”时,真空发生部分可能阻塞。如果
没有阻塞,真空发生器可能有故障。
第三章 调整
3-18
1.1.3. 检查真空传感器功能
检查真空传感器功能可按以下过程进行。
第一步 使目标工作头产生真空
参考前一部分第一至三步。
第二步 选择<3/4/MANUAL>-<3A VACUUM SENSOR>并按回车键。
由传感器检测的当前真空度显示于操作显示器上。
l 真空度显示
第三步 检查真空传感器功能
当把手放在吸嘴尖开口处及移开时,确保真空度不断变化。吸嘴开口处
封闭时真空度增加。
第四步 返回输出监示屏幕关闭真空。
检查光标在输出监示屏幕的工作头真空度栏的目标工作头上,按回车键
关闭真空发生器。
第三章 调整
3-19
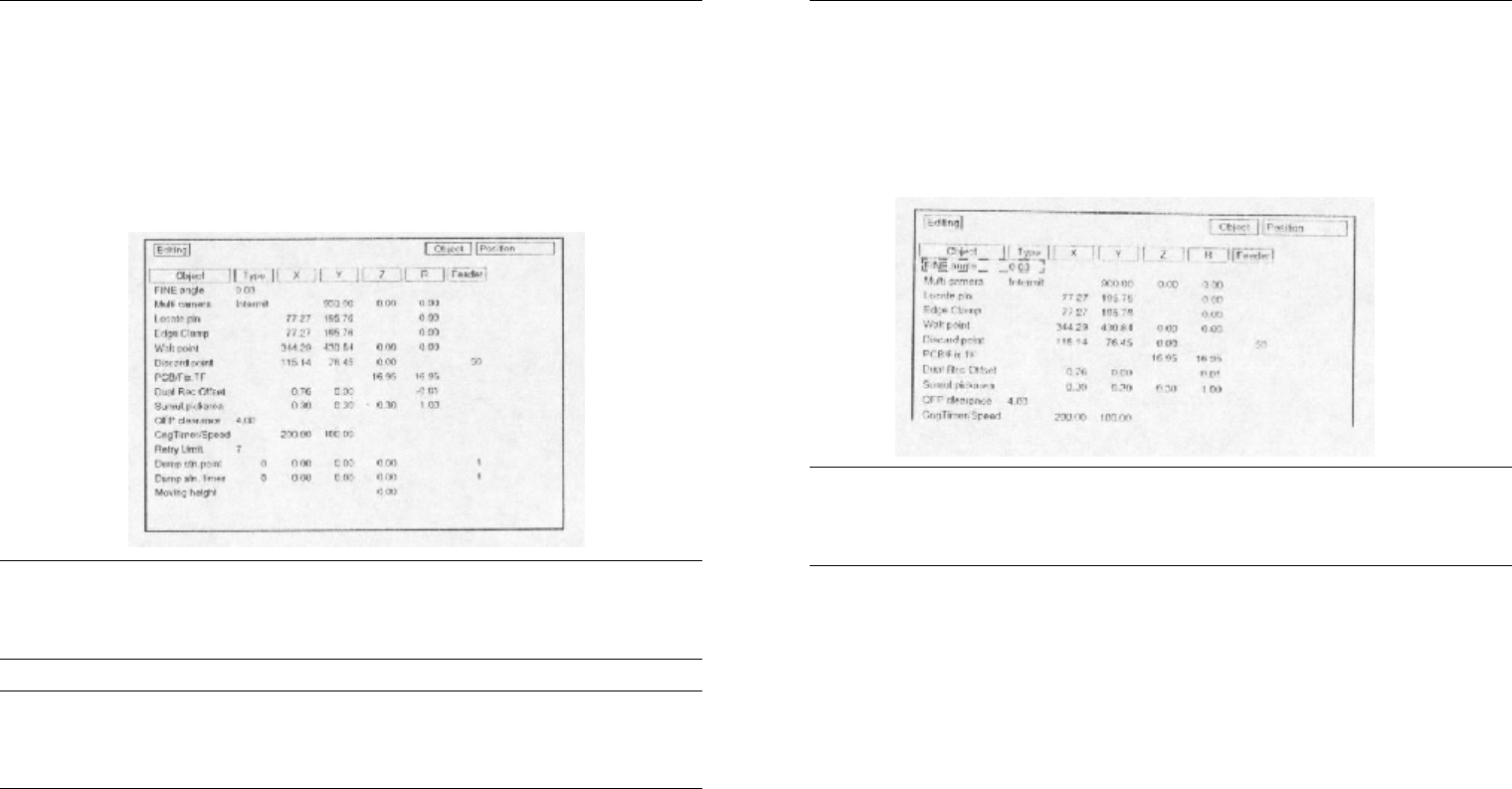
1.2. 位置(机器坐标)
在机器调整模式,当选择<3/3/B1 ADJUST TARGET>-“Position”并按回
车键,以下窗口显示表明各部件相对于机器原点的位置及基本参数设置。在
此屏幕上,可执行示教或编辑各项参数设置。此部分描述了如何设置相对于
工作头的主要参数。( 其他项目可按[F1]键获取帮助信息)
l 位置(机器坐标)屏幕
参考
“位置”屏幕可通过选择机器数据模式中的<3/2/A1 SELECT
TARGET>-“Position”并按回车键显示。
小心
位置数据在机器出厂前已正确设定。通常不需另加修改。必要的话,按
此节所述正确操作。
第三章 调整
3-20
1.2.1. 超细角度
当以单光学镜头识别 QFP 时选择了超细模式,超细角度参数决定了识别
角度应被调整至特定角度的准确度。此参数可设为 0.01,0.02,0.03 或 0.04 度。
推荐在机器调整时设为 0.01,实际贴装时设为 0.02 至 0.04。使用[INS],[DEL]
及空格键修改。
注意
此参数设置越小,识别角度越准确。然而,识别时间也将延长,或元件
因没有调整至指定角度而丢弃。
1.2.2. 复合镜头
复合镜头“Y”
此数据为元件识别时工作头通过复合镜头的移动速度(mm/sec)。此 速度
出厂设置为“900”。不要更改此值。
复合镜头“Z”,“ R ”
这些数据校正复合镜头相对于各轴的角度偏差。“Z”栏为复合镜头 2,
“R”栏为复合镜头 1。通常设置为“0.00”。
第三章 调整
3-21
1.2.3. 定位销
这是当 PCB 定位于贴装位置时的基准点。当设置定位销位置时,使用示
教至固定定位销的中心。
第一步 升起定位销
1) 选择<3/4/C1 OUTPUT MONITOR>并按回车键。
2) 使用方向键移动光标至“TN03”(定位销)并按回车键升起定位销。
当定位销升起,输出监示屏幕数字变为“1”。
第二步 进入机器调整模式设置示教条件。
选择“Camera”为示教单元并设置示教条件。
参考
当于机器调整模式中设定示教条件时,示教速度将设为最低,即使选择
了其他速度。
第三步 打开位置屏幕
选择<3/3/B1 ADJUST TARGET>-“Position”并按回车键。
第四步 移动光标至“Locate pin”行的“X”处。
使用方向键或回车键移动光标至“Locate pin”行的“X”处。
第五步 移动光标至固定定位销的中心
操纵 YPU 摇杆移动工作头使固定定位销准确对齐光学显示器的十字线。
第三章 调整
3-22
第六步 执行定位销的示教
1) 按[F10]键两次执行 X 坐标的示教。
2) 然后,移动光标至“Locate pin”行的“Y”处
3) 按回车键。(需要不存盘退出时,选择<B3 RECOVER ADJUST>或
<B7 QUIT>并按回车键。
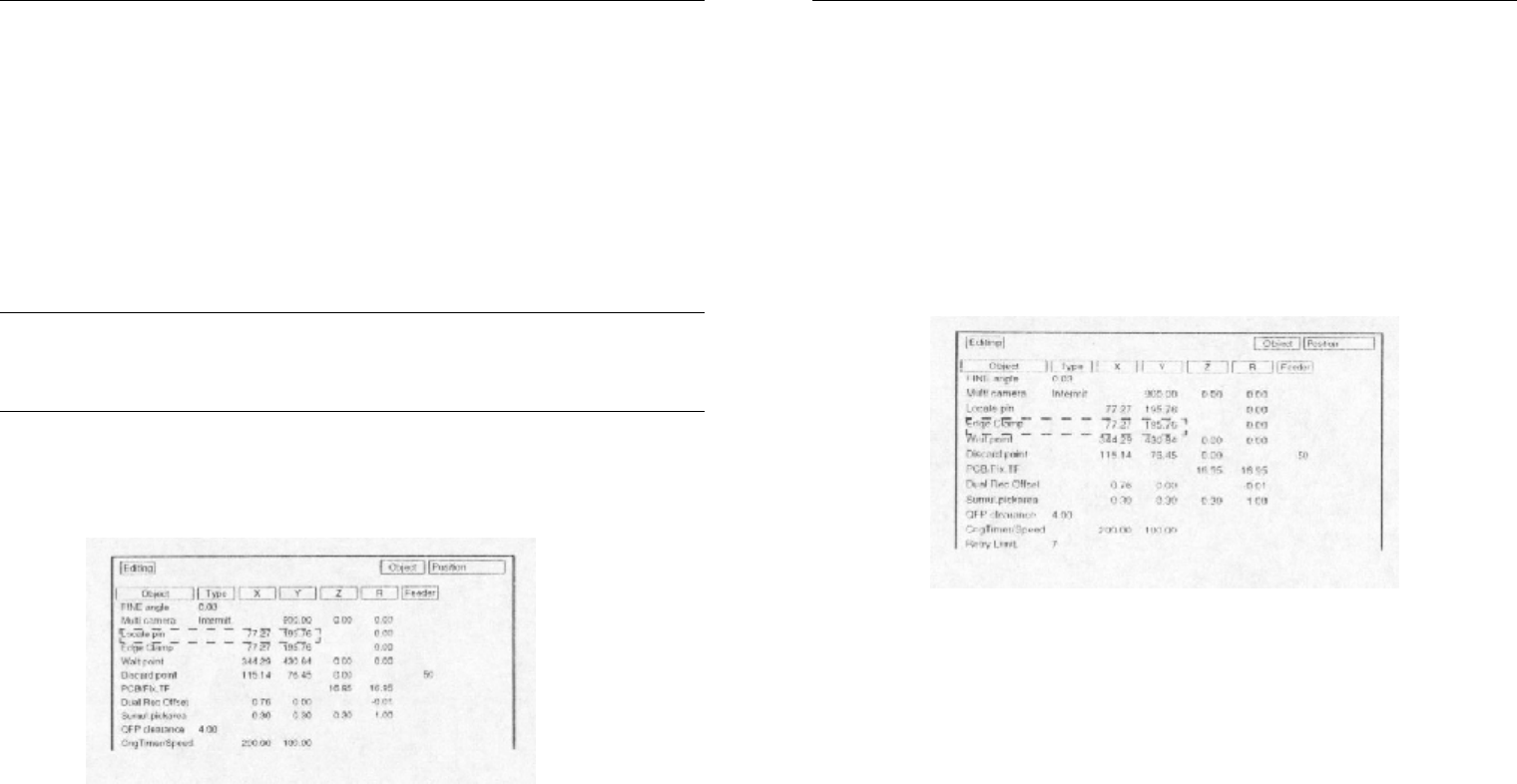
1.2.4. 边夹
当使用边夹固定 PCB 时,PCB 位置可能相对于那些由定位销决定的位置
来说有轻微偏移。如果发现偏移,则从定位销坐标中减去并在“Edge Clamp”
中输入。通常,输入与“Locate pin”相同的坐标。