YV100II维修手册.pdf - 第75页
第 三章 调整 3 - 123 (如 取 消 保 存 ,可选 择 < B 3 R E C O V E R AD J U S T> 或 < B 7 Q U I T> 并 按 回车 键。 6.3.4. 调整 Y 轴 软 限 位 与 X 轴一 样 , Y 轴 软 限 位 应 设 为 正 负 方向 的第 二 限 位向 内 1.00 mm 位 置。 X 轴移动 范围 注意 根 据调整第 二 限 位 时 所 记 录 第 二 …
第三章 调整
3-121
第四步 打开软限位屏幕执行与机械挡块接触位置的位置示教。
1. 选择<3/3/B1 ADJUST TARGET>-“Soft Limit”并按回车键。
2. 使用方向键移动光标至“Z1/MAIN”或“Z2/MAIN”。
以上第二步所移动的位置光标应位于“direct”。
3. 按[F10]键两次执行示教。
此参数的数值须更改,因为这是机械限位(硬限位)的坐标值。
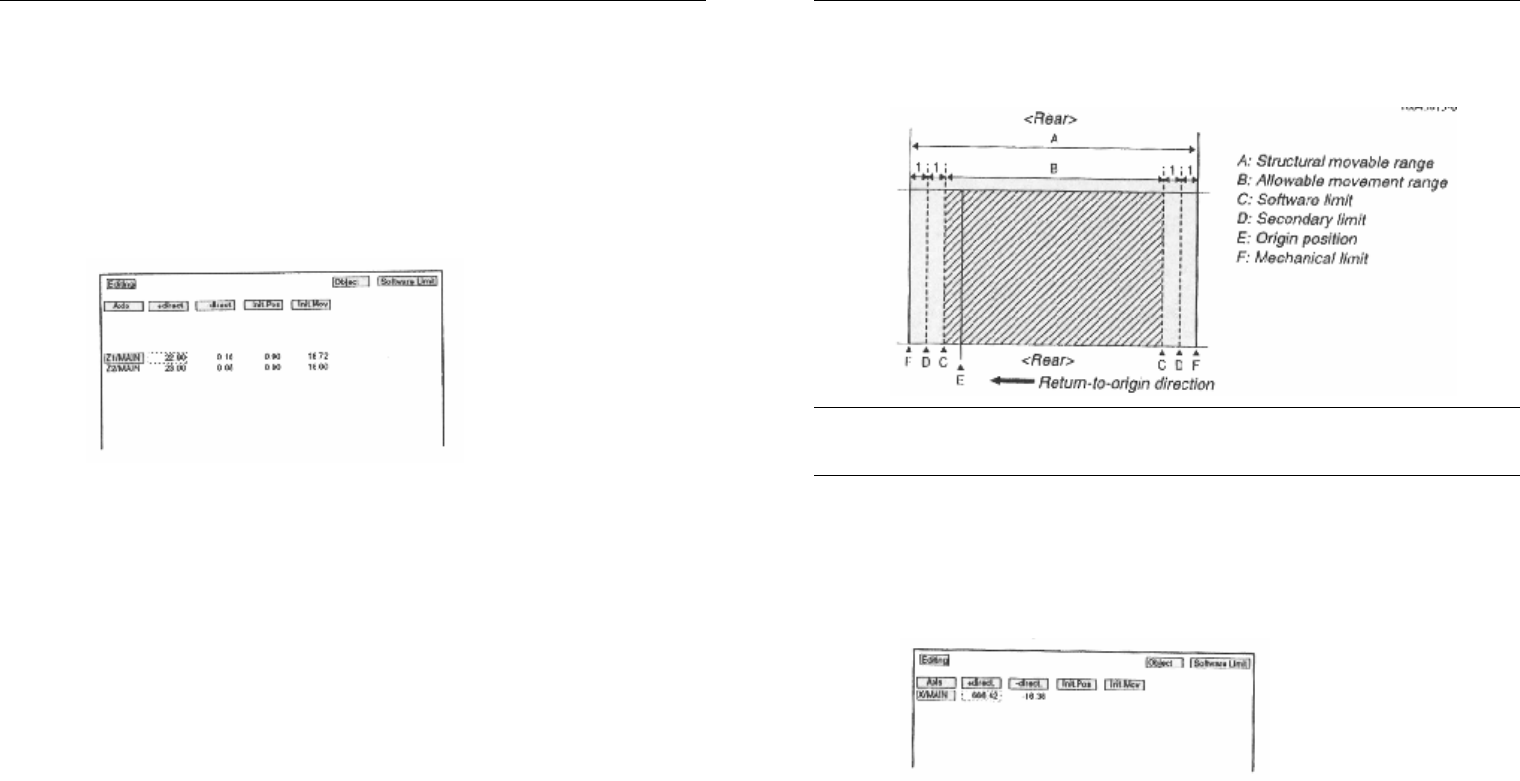
l Z 轴软限位设置屏幕
第五步 输入软限位
在正向方向输入获得的机械限位数值减去 1.00mm,在负向方向输入获得
的机械限位数值加上 1.00mm。
第六步 保存设置。
按[ESC]键,选择<B2 SAVE DATA>或<B0 SAVE & QUIT>并按回车键。
(如取消保存,可选择<B3 RECOVER ADJUST>或<B7 QUIT>并按回车键。
第三章 调整
3-122
6.3.3. 调整 X 轴软限位
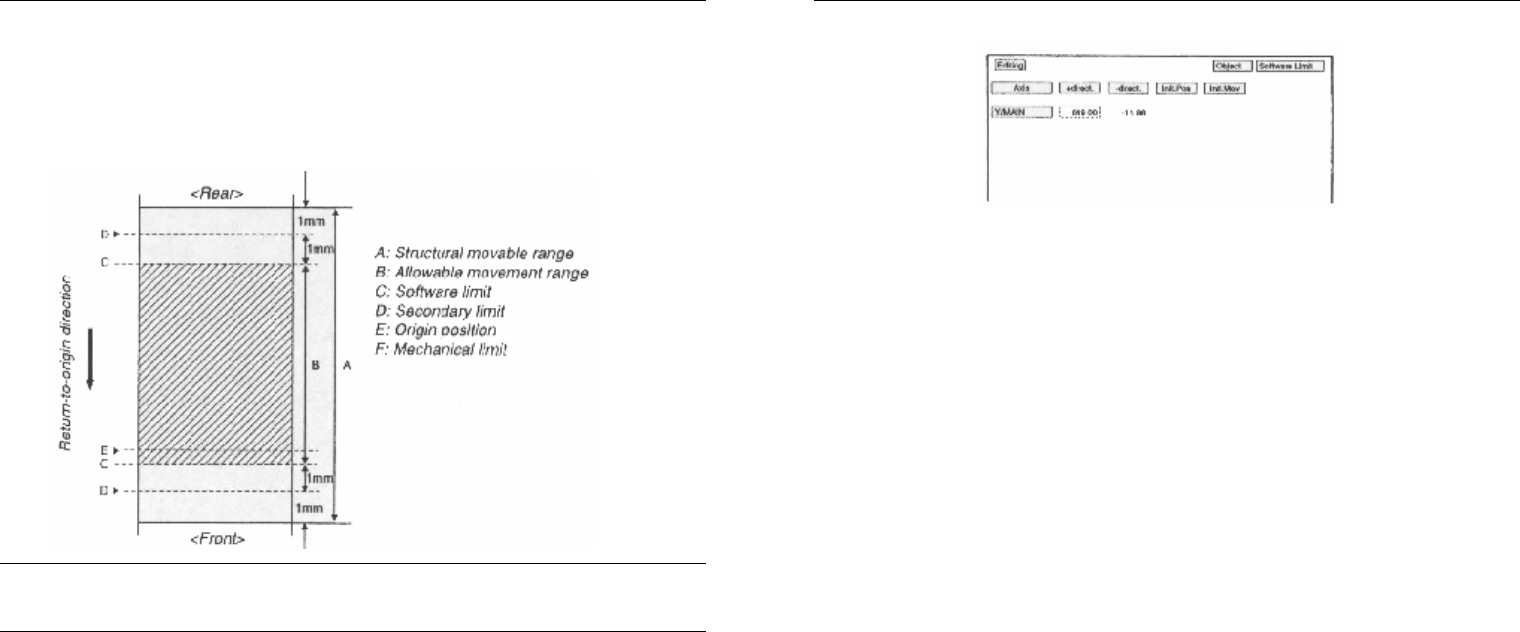
X 轴软限位应设为正负方向的第二限位向内 1.00mm 位置。
l X 轴移动范围
注意
根据调整第二限位时所记录第二限位位置坐标调整。
第一步 打开软限位屏幕
1. 选择<3/3/B1 ADJUST TARGET>-“Soft Limit”并按回车键。
2. 使用方向键移动光标至“X/MAIN”的“+direct”或“-direct”。
以上第二步所移动的位置光标应位于“direct”。
l X 轴软限位设置屏幕
第二步 输入软限位
在正向方向输入获得的机械限位坐标数值减去 1.00mm,在负向方向输入
获得的机械限位坐标数值加上 1.00mm。
第三步 保存设置。
按[ESC]键,选择<B2 SAVE DATA>或<B0 SAVE & QUIT>并按回车键。
第三章 调整
3-123
(如取消保存,可选择<B3 RECOVER ADJUST>或<B7 QUIT>并按回车键。
6.3.4. 调整 Y 轴软限位
与 X 轴一样,Y 轴软限位应设为正负方向的第二限位向内 1.00mm 位置。
X 轴移动范围
注意
根据调整第二限位时所记录第二限位位置坐标调整。
第一步 打开软限位屏幕
1. 选择<3/3/B1 ADJUST TARGET>-“Soft Limit”并按回车键。
2. 使用方向键移动光标至“Y/MAIN”的“+direct”或“-direct”。
以上第二步所移动的位置光标应位于“direct”。
第三章 调整
3-124
l Y 轴软限位设置屏幕
第二步 输入软限位
在正向方向输入获得的机械限位坐标数值减去 1.00mm,在负向方向输入
获得的机械限位坐标数值加上 1.00mm。
第三步 保存设置。
按[ESC]键,选择<B2 SAVE DATA>或<B0 SAVE & QUIT>并按回车键。
(如取消保存,可选择<B3 RECOVER ADJUST>或<B7 QUIT>并按回车键。
第三章 调整
3-125
6.3.5. 调整 R 轴软限位
R轴软限位应设为负方向(顺时针)为固定值-360°,正方向(逆时针)
为固定值 360°。
第一步 打开软限位屏幕
3. 选择<3/3/B1 ADJUST TARGET>-“Soft Limit”并按回车键。
4. 使用方向键移动光标至“R1/MAIN”(或“R2/MAIN”)行。
第二步 输入软限位
在正向方向输入 360°,在负向方向输入-360°。
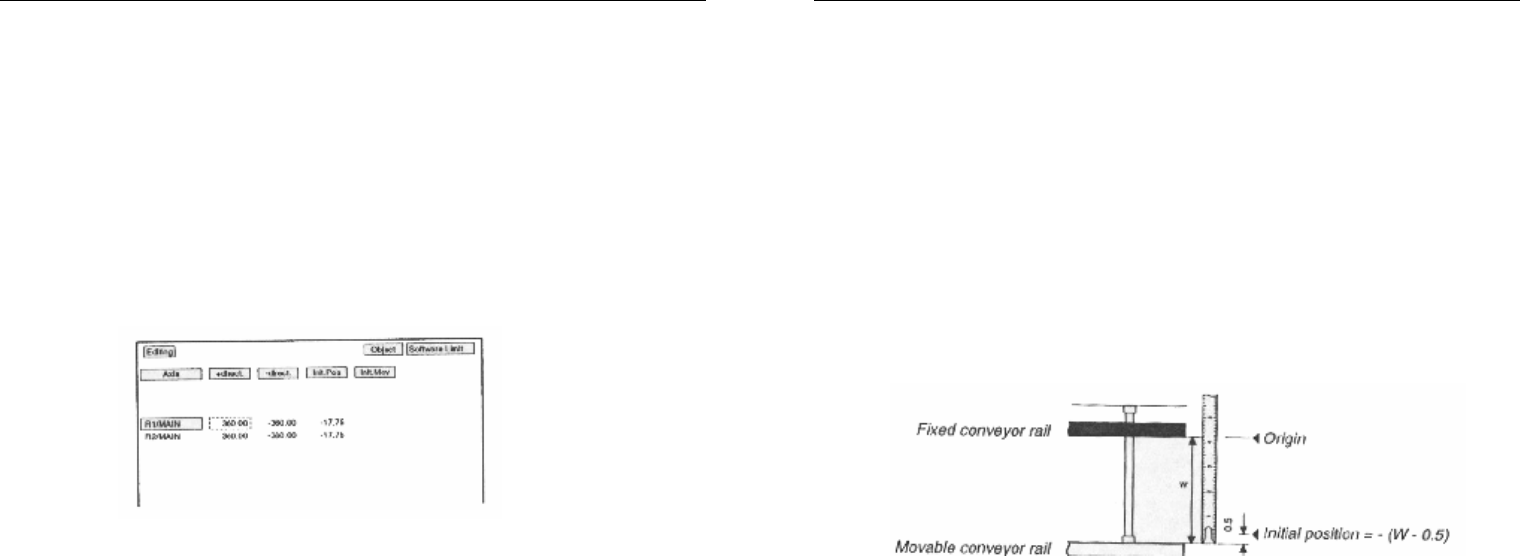
l R 轴软限位设置屏幕
第三步 保存设置。
按[ESC]键,选择<B2 SAVE DATA>或<B0 SAVE & QUIT>并按回车键。
(如取消保存,可选择<B3 RECOVER ADJUST>或<B7 QUIT>并按回车键。
第三章 调整
3-126
6.4. 初始位置与初始移动
此部分解释了如何调整 W 轴与 R 轴初始位置与 Z 轴初始移动。
6.4.1. 调整 W 轴初始位置
W轴初始位置为当回原点位置后传送导轨之间的距离,表示于负值。欲
设置 W 轴初始位置,按以下步骤。
第一步 执行回原点操作。
第二步 按急停按钮并确定初始位置
1. 测量传送带宽度(固定导轨至移动导轨之间的距离)。
2 . 从 此数值减去 0.5mm 间隙值,并标上负号
此值即为 W 轴初始位置。
l 传送带宽度测量与初始位置
第三步 打开软限位屏幕输入初始位置
1. 选择<3/3/B1 ADJUST TARGET>-“Soft.Limit”并按回车键。
2. 使用方向键移动光标至“W/MAIN”行的“Init.Pos”栏。
3. 使用数字键输入第二步获得的初始位置数值。