YV100II维修手册.pdf - 第68页
第 三章 调整 3 - 109 6.1.1. 调整 W 轴机器 原 点 对 于 安 装 了 自 动 调 宽 的机器来 说 , 使 用 以下 步骤 以调 节 机器 原点 。( 手动 调 宽 的机器 无 需调 整) W 轴 由 5 .00 mm/ 转 的 马 达 控 制 。 传 送 带 宽 度 由 移 动后 导 轨 完 成 。( 前 导 轨 固 定 )。 当 左 边 W 轴 丝杠末 端 处 传感 器 感 应 到 移动 导 轨 上 的 原点挡…
第三章 调整
3-107
欲保证轴移动与贴装的精确性,以下参数需正确设置
l 移动轴的参数调整
参数 轴 设置
机器原点 W,Z,X,Y,R 35-65%
第二限位 X,Y 机械限位向内 1mm
W
机械限位向内 0.5mm
Z
机械限位向内 1mm
X
第二限位向内 1mm
Y
第二限位向内 1mm
软限位
R
正向 360°负向-360°
W
回原点后,传送带宽度减 0.5mm 并加
上负号
初始位置
R
吸嘴片状弹簧的角度与 X 轴平行
初始移动
Z
各吸嘴尖刚刚接触 PCB 表面的高度
注意
W轴宽度调整仅对自动调宽机器有效。
第三章 调整
3-108
6.1. 机器原点
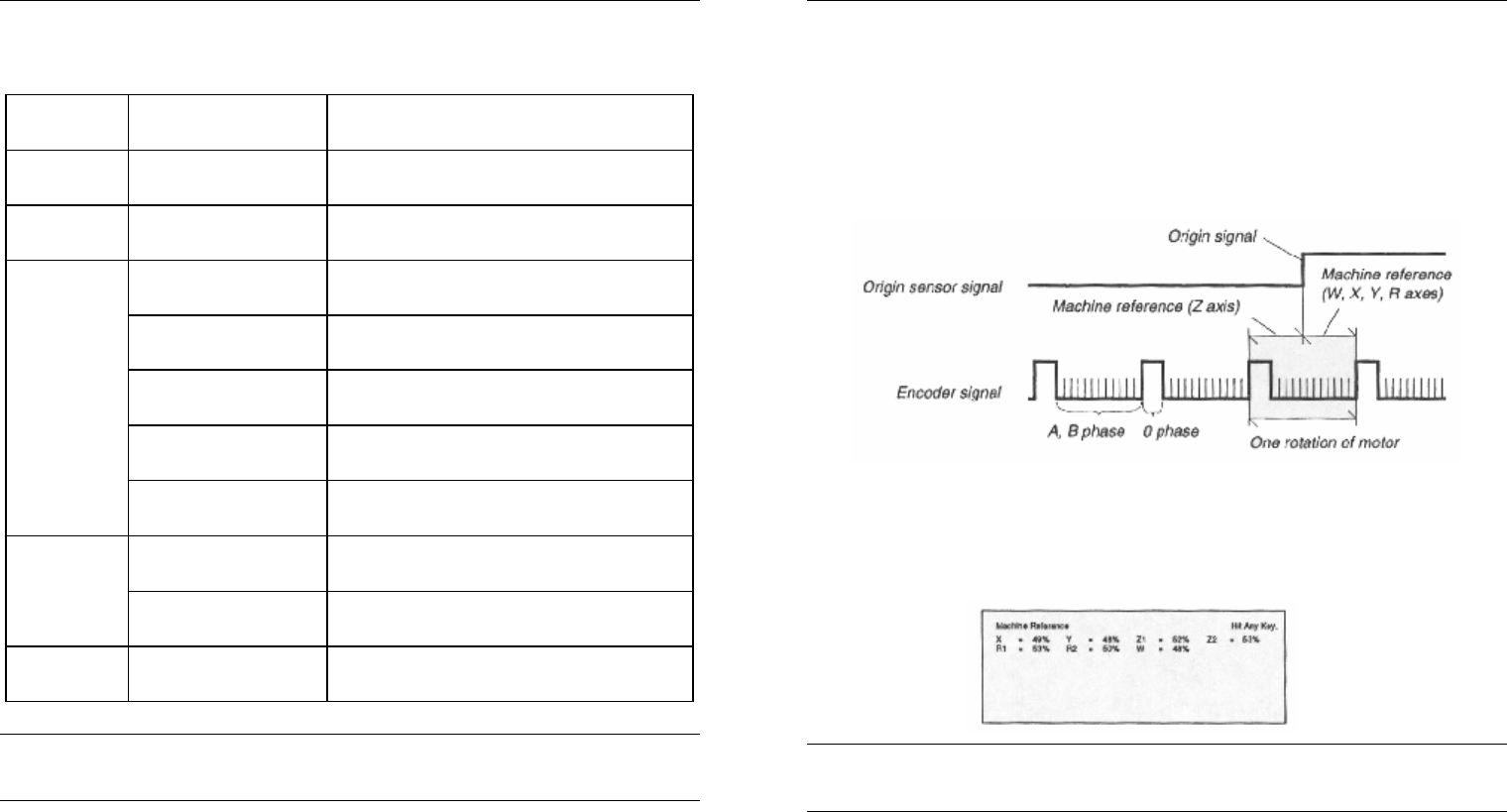
各轴固化的马达编码器在每次旋转完成后输出“0”脉冲。
当执行回原点操作时,在原点信号检测位置与下一个编码器输出“0”脉
冲的位置距离上略有不同。因此机器原点通常表示为百分率,100%代表马达
旋转一整圈。
l 机器原点
让我们检查机器原点设置
移动元件至<3/MAINTE/M>-“4/MANUAL>-<B6 INIT.SERVO ORIGIN>
并按[SHIFT]+回车键。机器在回原点后原点数据显示于操作显示器上。
l 机器原点数据显示
注意
机器原点值必须为 35%-65%,如超出范围,按以下步骤调整。
第三章 调整
3-109
6.1.1. 调整 W 轴机器原点
对于安装了自动调宽的机器来说,使用以下步骤以调节机器原点。( 手动
调宽的机器无需调整)W 轴由 5.00mm/转的马达控制。传送带宽度由移动后
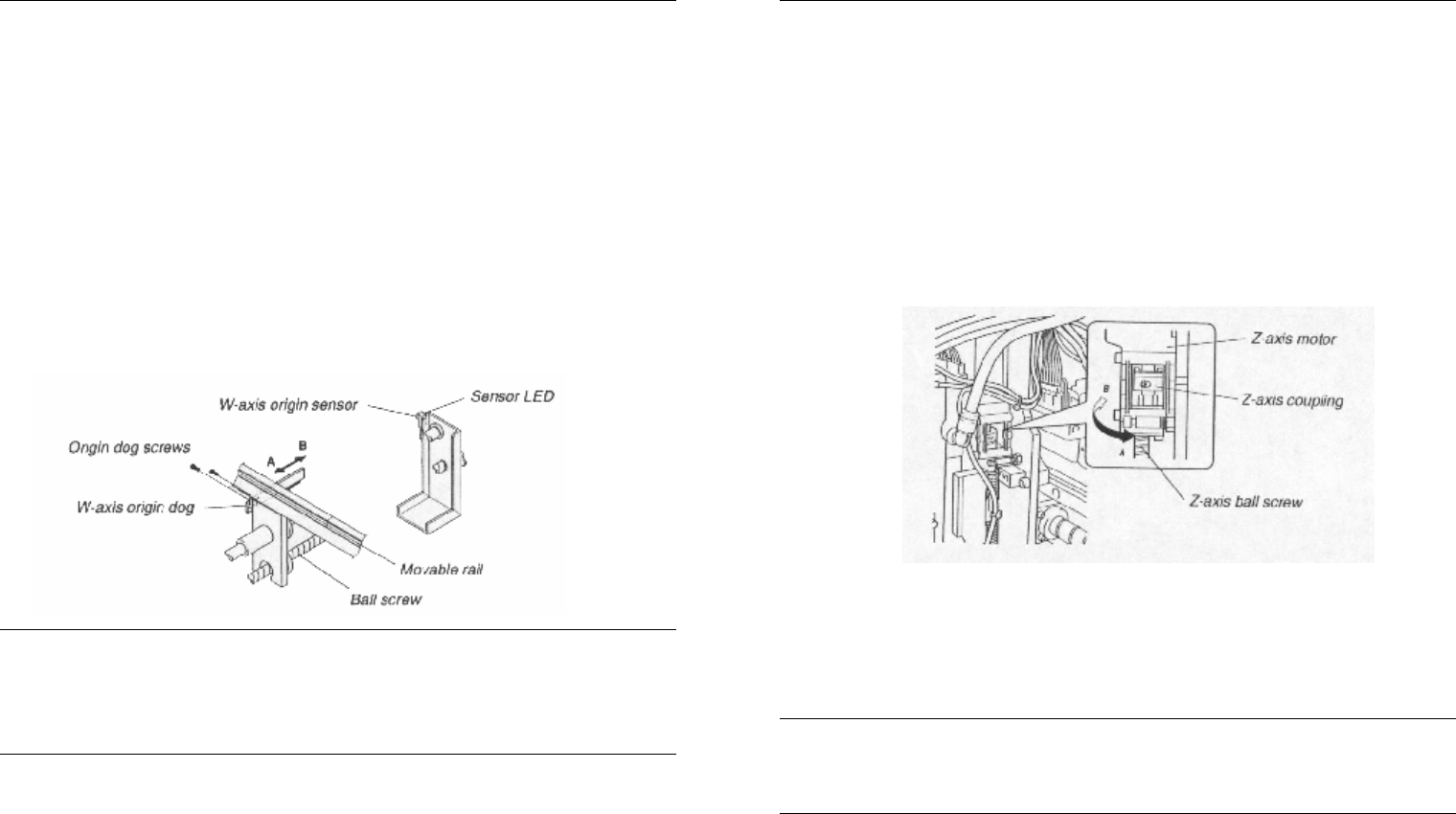
导轨完成。( 前 导 轨 固 定)。 当 左 边 W 轴 丝杠末端处传感器感应到移动导轨上
的原点挡块时则输出原点信号。欲调整 W 轴机器原点,按以下步骤。
第一步 按下急停按钮。
第二步 调整机器原点。
松开 W 轴原点挡块固定螺钉,并轻微滑动,欲增加机器原点值:将挡块
向增加宽度方向滑动(A)。 欲 降低机器原点值:将挡块向减小宽度方向滑动
(B)。
l 调整 W 轴机器原点
注意
移动原点挡块 1mm 约为改变原点值 20%。
不要移动原点挡块超过 2.5mm,如果移动过多,另一周期的“0”脉冲将
被接收,导致原点偏移。
第三步 锁紧螺钉以固定 W 轴原点挡块。
第三章 调整
3-110
6.1.2. 调整 Z 轴机器原点
Z 轴通过使用丝杠螺母垂直移动吸嘴轴。旋转螺距为 5.00mm。当回原点
执行时,Z 轴以缓慢速度向上移动,当检测到所产生的马达高电流情况
为原点信号。此时马达轻微反转,将获得的编码器输入“0”的位置作为
原点。( 无 传感器与原点挡块)。 欲 调整 Z 轴机器原点,按以下步骤。
第一步 按下急停按钮。
第二步 松开固定Z轴电机端轴承的联轴器。
当从右方观察工作头时,可看到联接 Z 轴电机与丝杠的联轴器。用手上
下移动工作头使联轴器固定螺栓方向面对你。然后用六角扳手松开螺栓。。
l Z 轴 电 机与丝杠
第三步 调整机器原点。
旋转丝杠以调整机器原点。
欲增加原点值:以 A 方向旋转。( Z 轴 向 下 移动)
欲降低原点值:以 B 方向旋转。( Z 轴 向 上 移动)
注意
Z轴移动 1mm 相当于机器原点的 25%。确保移动不要超过 2mm。如 果 移
动 过多,另一周期的“0”脉冲将被接收,导致原点偏移。
第六步 锁紧螺栓以固定联轴器。
确保机器原点处于误差范围之内。
第三章 调整
3-111
6.1.3. 调整 X 轴机器原点
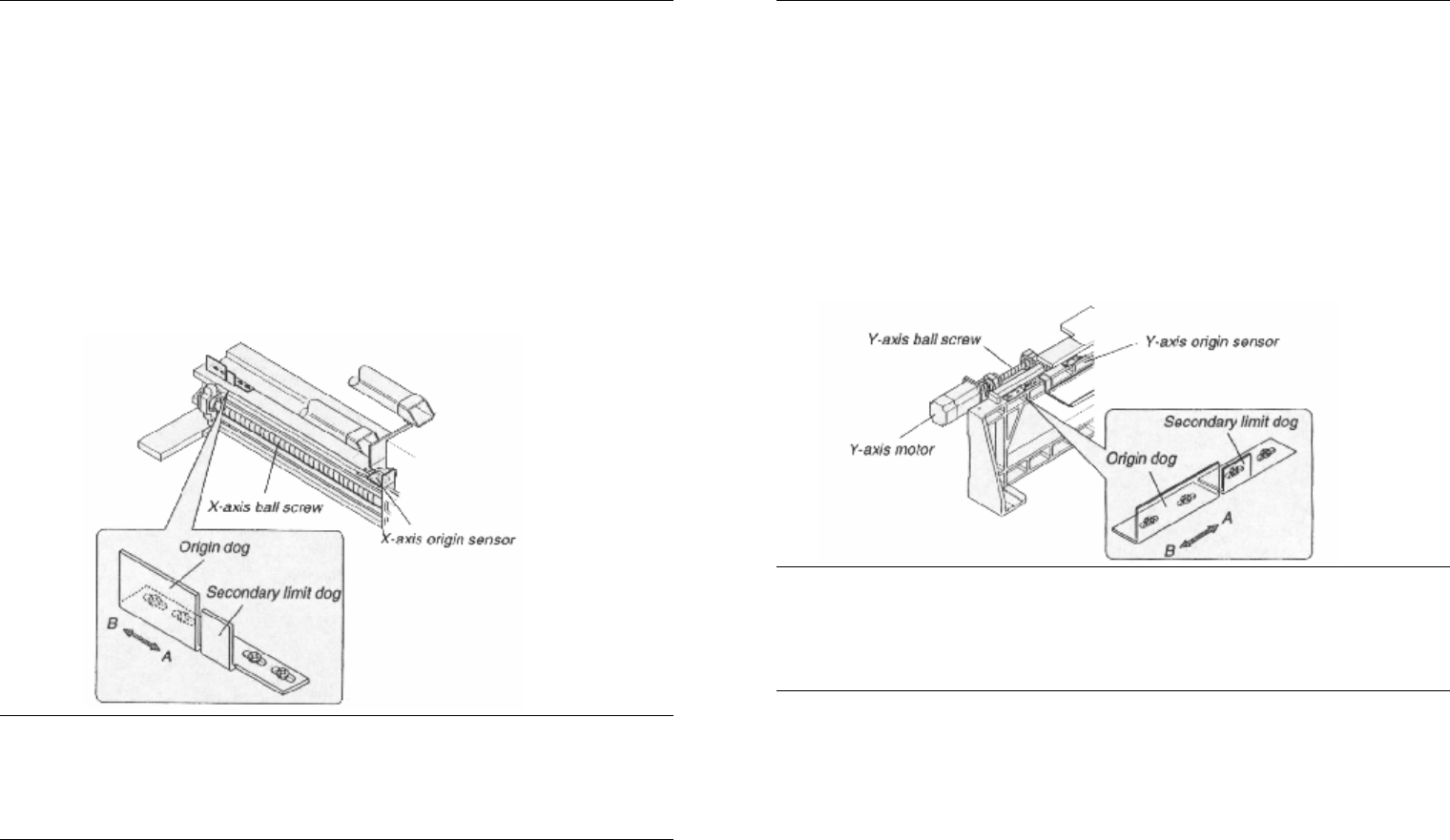
X轴以平行于 PCB 传送方向移动工作头。由 20.00mm/转的丝杠驱动。当
X轴滑动平台底部的传感器检测到 X轴臂上左方的原点挡块时输出原点信号。
欲调整 X 轴机器原点,按以下步骤操作。
第一步 按下急停按钮。
第二步 调整机器原点。
松开固定 X 轴原点挡块的螺钉并轻微滑动。
欲增加机器原点值:挡块向右滑(A)。
欲 降低机器原点值:挡块向左滑(B)。
l 调整 X 轴机器原点
注意
原点挡块 2mm 移动相当于机器原点值的 10%改变。
不要滑动挡块超过 10mm。如果移动过多,另一周期的“0”脉冲将被接
收,导致原点偏移。
第三步 锁紧螺钉以固定原点挡块。
确保机器原点值处于误差范围之内。
第三章 调整
3-112
6.1.4. 调整 Y 轴机器原点
Y轴以垂直于PCB 传送方向移动工作头。由 20.00mm/转的丝杠驱动。当
Y 轴滑动平台底部的传感器检测到前方 Y 轴臂上右方的原点挡块时输出原点
信号。欲调整 Y 轴机器原点,按以下步骤操作。
第一步 按下急停按钮。
第二步 调整机器原点。
松开固定 Y 轴原点挡块的螺钉并轻微滑动。
欲增加机器原点值:挡块向后滑(A)。
欲 降低机器原点值:挡块向前滑(B)。
l 调整 Y 轴机器原点
注意
原点挡块 2mm 移动相当于机器原点值的 10%改变。
不要滑动挡块超过 10mm。如果移动过多,另一周期的“0”脉冲将被接
收,导致原点偏移。
第三步 锁紧螺钉以固定原点挡块。
确保机器原点值处于误差范围之内。