4H4CEPM.pdf - 第46页
Page 36 4H4C-E-PMA01-A03-01 2. Board Recognition Point ∗ ∗ ∗ ∗ ∗ Recognition Point Coordinates (X, Y) Enter the coordinates of each board recognition point. When entering ABC(D) points, they must be in alphabetical order…
Page 35
301
CM
4H4C-E-PMA01-A03-01
444C-EPt-EdBr-001
7 Board Recognition Data
7-1 Board Recognition Data
1. BoardRecogMode
2. Board recognition point
∗ Recognition point coordinates (X, Y)
∗ REF
The descriptions are as follows.
∗∗
∗∗
∗ These descriptions are for both board
recognition and block recognition.
1. BoardRecogMode
Choose a mode from the following four according to the number of the points to be recognized.
AB point
This is the most general mode. Mounting position is corrected by recognizing two points on the
board.
Design boards so that the points to be recognized will exist as around the board as possible and
the distance between the two points will be as wide as possible.
ABC point
When you are afraid boards might expand or contract, use this mode. Mounting position is
corrected by recognizing three points on the board. This mode is effective against simple expan-
sion and contraction of L and W.
Design boards so that the points to be recognized will exist as around the board as possible and
the distance among the three points will be as wide as possible.
Compared with AB point, it takes longer time to recognize the board.
ABCD point
When you are afraid boards might expand or contract and they can not be mounted successfully
by using ABC point, use this mode. Mounting position is corrected by recognizing four points on
the board. Depending on the degree of deformity of boards, this mode might not be effective.
Design boards so that the points to be recognized will exist as around the board as possible and
the distance among the four points will be as wide as possible.
It takes the longest time to recognize the board of all the four modes.
A point
Mounting position is corrected by recognizing only one point on the board. So the deviation due
to a rotation in
θ
direction can not be corrected.
It takes the shortest time to recognize the board of all the four modes.
Page 36
4H4C-E-PMA01-A03-01
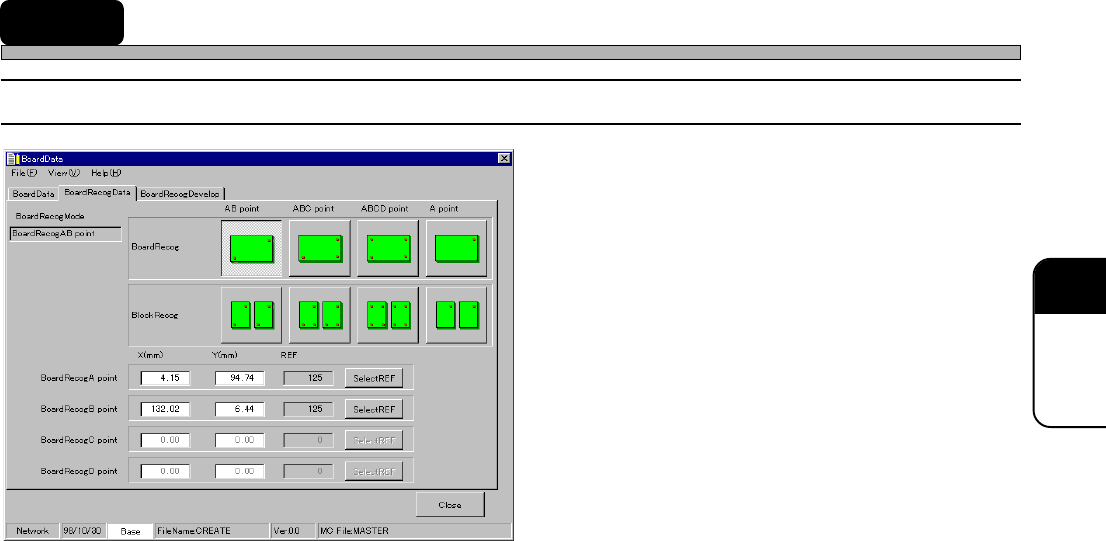
2. Board Recognition Point
∗∗
∗∗
∗ Recognition Point Coordinates (X, Y)
Enter the coordinates of each board recognition point.
When entering ABC(D) points, they must be in alphabetical order and clockwise.
The coordinates are represented on the basis of Coordinates and OriginOffset.
∗∗
∗∗
∗ REF and SelectREF
REF is the No. that specifies the recognition program.
Board Recognition Data
A
B
C
Clockwise
433C-079E
Page 37
301
CM
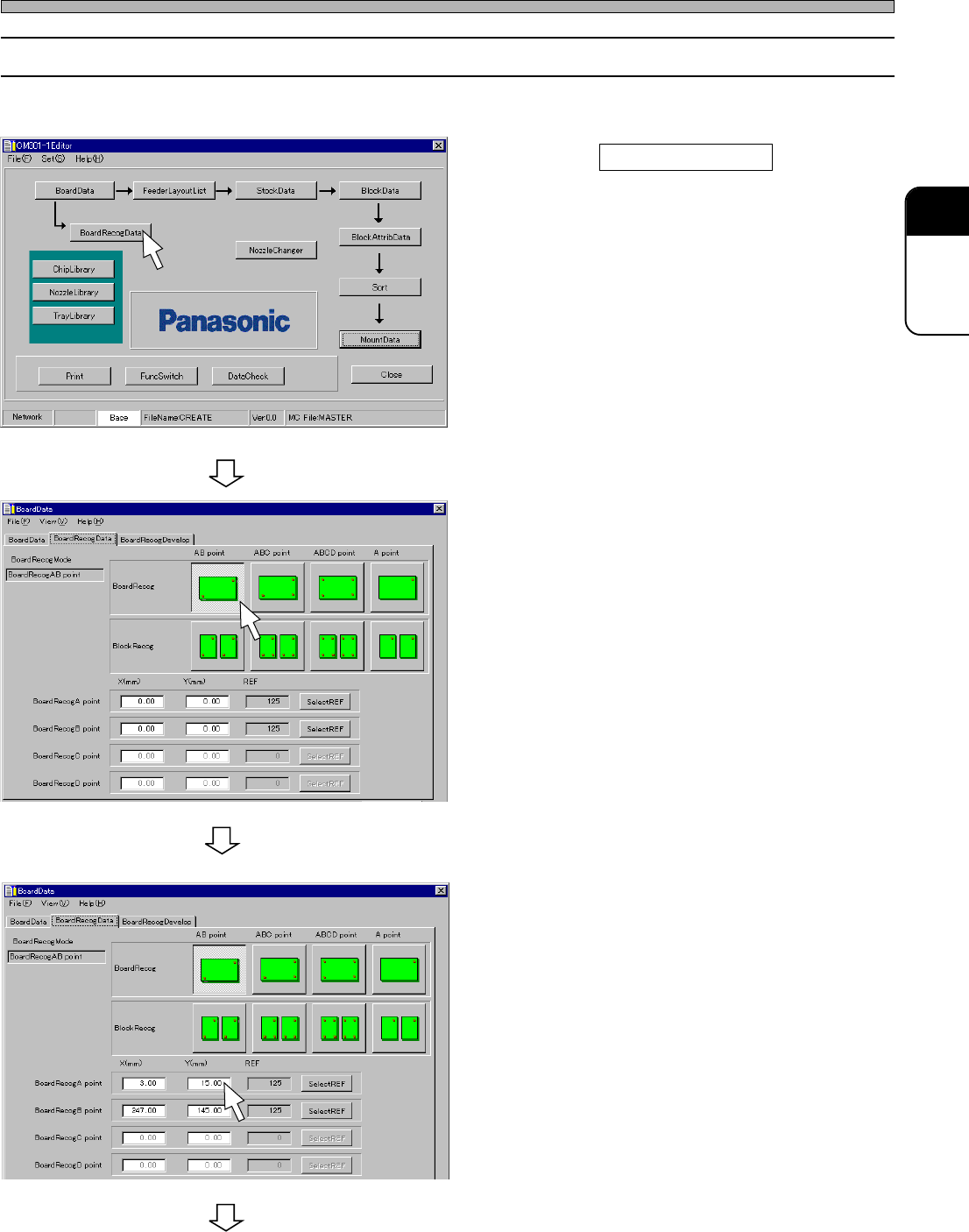
7-2 Editing Board Recognition Data
∗ When BoardRecog is disabled in FunctionSwitches, you can not edit this data.
1. Click on BoardRecogData .
• [BoardRecogData] sheet on [BoardData]
window opens.
2. Select BoardRecogMode.
3. Enter the coordinates of
BoardRecogA point.
444C-EPt-EdBr-002
444C-EPt-EdBr-004
To the next page
4H4C-E-PMA01-A03-01
Board Recognition Data
4H4C-EPt-Ed-001