HS50_advance_level 1_20200522_221201 (1).pdf - 第303页
\ Istpos Fach 7 \ 1518125, \ X-Istpos \ 1347292, \ Y-Istpos \ 873! \ Z-Istpos \ \ Istpos Fach 8 \ 1440157, \ X-Istpos \ 1347251, \ Y-Istpos \ 875! \ Z-Istpos \ \ Istpos Fach 9 \ 1362137, \ X-Istpos \ 1347240, \ Y-Istpos …
\ X-Istpos \ 500284,
\ Y-Istpos \ 887!
\ Z-Istpos \
\ Istpos Fach 3 \ 1440393,
\ X-Istpos \ 500303,
\ Y-Istpos \ 886!
\ Z-Istpos \
\ Istpos Fach 4 \ 1518371,
\ X-Istpos \ 500351,
\ Y-Istpos \ 888!
\ Z-Istpos \
\ Istpos Fach 5 \ 1596348,
\ X-Istpos \ 500426,
\ Y-Istpos \ 887!
\ Z-Istpos \
\ Istpos Fach 6 \ 1284004,
\ X-Istpos \ 564115,
\ Y-Istpos \ 888!
\ Z-Istpos \
\ Istpos Fach 7 \ 1361974,
\ X-Istpos \ 564229,
\ Y-Istpos \ 887!
\ Z-Istpos \
\ Istpos Fach 8 \ 1440027,
\ X-Istpos \ 564264,
\ Y-Istpos \ 889!
\ Z-Istpos \
\ Istpos Fach 9 \ 1517975,
\ X-Istpos \ 564345,
\ Y-Istpos \ 884!
\ Z-Istpos \
\ Istpos Fach 10 \ 1595983,
\ X-Istpos \ 564394,
\ Y-Istpos \ 886>
\ Z-Istpos \
\ Vermessung Pipettenwechsler 3 \
nozzle changer gantry
3
\ Istpos Abstreifen 1 \ 1257070,
\ X-Istpos \ 1483874,
\ Y-Istpos \ 924!
\ Z-Istpos \
\ Istpos Abstreifen 2 \ 0,
\ X-Istpos \ 0,
\ Y-Istpos \ 0,
\ Z-Istpos \
\ Istpos Fach 1 \ 1595838,
\ X-Istpos \ 1410925,
\ Y-Istpos \ 874!
\ Z-Istpos \
\ Istpos Fach 2 \ 1517852,
\ X-Istpos \ 1410906,
\ Y-Istpos \ 872!
\ Z-Istpos \
\ Istpos Fach 3 \ 1439867,
\ X-Istpos \ 1410847,
\ Y-Istpos \ 873!
\ Z-Istpos \
\ Istpos Fach 4 \ 1361873,
\ X-Istpos \ 1410858,
\ Y-Istpos \ 877!
\ Z-Istpos \
\ Istpos Fach 5 \ 1283865,
\ X-Istpos \ 1410809,
\ Y-Istpos \ 879!
\ Z-Istpos \
\ Istpos Fach 6 \ 1596104,
\ X-Istpos \ 1347357,
\ Y-Istpos \ 872!
\ Z-Istpos \
Edition 1.0 2 PPW_VERM_MA_e.xls PPW_VERM.MA SD EA1 S GC Training
\ Istpos Fach 7 \ 1518125,
\ X-Istpos \ 1347292,
\ Y-Istpos \ 873!
\ Z-Istpos \
\ Istpos Fach 8 \ 1440157,
\ X-Istpos \ 1347251,
\ Y-Istpos \ 875!
\ Z-Istpos \
\ Istpos Fach 9 \ 1362137,
\ X-Istpos \ 1347240,
\ Y-Istpos \ 873!
\ Z-Istpos \
\ Istpos Fach 10 \ 1284140,
\ X-Istpos \ 1347199,
\ Y-Istpos \ 879>
\ Z-Istpos \
\ Vermessung Pipettenwechsler 4 \
nozzle changer gantry
4
\ Istpos Abstreifen 1 \ 419635,
\ X-Istpos \ 1483711,
\ Y-Istpos \ 931!
\ Z-Istpos \
\ Istpos Abstreifen 2 \ 0,
\ X-Istpos \ 0,
\ Y-Istpos \ 0,
\ Z-Istpos \
\ Istpos Fach 1 \ 758648,
\ X-Istpos \ 1410884,
\ Y-Istpos \ 893!
\ Z-Istpos \
\ Istpos Fach 2 \ 680663,
\ X-Istpos \ 1410828,
\ Y-Istpos \ 890!
\ Z-Istpos \
\ Istpos Fach 3 \ 602678,
\ X-Istpos \ 1410750,
\ Y-Istpos \ 886!
\ Z-Istpos \
\ Istpos Fach 4 \ 524666,
\ X-Istpos \ 1410726,
\ Y-Istpos \ 886!
\ Z-Istpos \
\ Istpos Fach 5 \ 446664,
\ X-Istpos \ 1410705,
\ Y-Istpos \ 886!
\ Z-Istpos \
\ Istpos Fach 6 \ 758464,
\ X-Istpos \ 1346851,
\ Y-Istpos \ 891!
\ Z-Istpos \
\ Istpos Fach 7 \ 680484,
\ X-Istpos \ 1346761,
\ Y-Istpos \ 891!
\ Z-Istpos \
\ Istpos Fach 8 \ 602466,
\ X-Istpos \ 1346661,
\ Y-Istpos \ 887!
\ Z-Istpos \
\ Istpos Fach 9 \ 524480,
\ X-Istpos \ 1346558,
\ Y-Istpos \ 884!
\ Z-Istpos \
\ Istpos Fach 10 \ 446462,
\ X-Istpos \ 1346515,
\ Y-Istpos \ 885
\ Z-Istpos \
}
Edition 1.0 3 PPW_VERM_MA_e.xls PPW_VERM.MA SD EA1 S GC Training
\ ## File converted by makonv at
Wed Nov 21 13:37:20 2001 \
{
\ Datei \
"REAL.MA"|
this File is changed by reconfiguration / calibration with SITEST
\ Version \
"31.503.011119_E"|
\ Maschinentyp \
"HS50"|
\ MA_Positionen \
A
ll values in µm
\ MA Nullpunkt_x_pg1
\
739500,
X
-coordinate Ma-0-point at fixed Transport rail in working area BB 1
\ MA Nullpunkt_y_pg1 \
718000,
Y- coordinate right double transport | or right-single transport|
\ MA Nullpunkt_x_pg2
\
1303500,
X
-coordinate Ma-0-point at fixed Transport rail in working area BB 2
\ MA Nullpunkt_y_pg2 \
718000,
Y- coordinate right double transport | or right-single transport | identical to BB1
\ Service_Pos_PG1P1_x \
600000,
A
fter movement to Service pos.the axis is disabled by SW (Do not mix up this
Service pos. with the waiting positon taken from IDEAL.MA) value for Gantry 4
\ Service_Pos_PG1P1_y \
1580000,
A
fter movement to Service pos.the axis is disabled by SW (Do not mix up this
Service pos. with the waiting positon taken from IDEAL.MA) value for Gantry 4
\ Service_Pos_PG1P2_x \
600000,
A
fter movement to Service pos.the axis is disabled by SW (Do not mix up this
Service pos. with the waiting positon taken from IDEAL.MA) value for Gantry 1
\ Service_Pos_PG1P2_y \
320000,
A
fter movement to Service pos.the axis is disabled by SW (Do not mix up this
Service pos. with the waiting positon taken from IDEAL.MA) value for Gantry 1
\ Service_Pos_PG2P1_x \
1400000,
\ Service_Pos_PG2P1_y \
1580000,
values valid for gantry 3
\ Service_Pos_PG2P2_x \
1400000,
\ Service_Pos_PG2P2_y \
320000,
values valid for gantry 2
\ Abwurf_Pos_P11_x
\
761000,
P11 mean portal group 1; left portal X-reject coordinate for gantry 4
\ Abwurf_Pos_P11_y \
1582000,
Yreject coordinate for gantry 4
\ Abwurf_Pos_P12_x
\
761000,
P12 mean portal group 1 right portal X-reject coordinate for gantry 1
\ Abwurf_Pos_P12_y \
333000,
Yreject coordinate for gantry 1
\ Abwurf_Pos_P21_x
\
1270000,
P21 mean portal group 2 left portal X-reject coordinate for gantry
3
\ Abwurf_Pos_P21_y \
1582000,
Yreject coordinate for gantry 3
\ Abwurf_Pos_P22_x
\
1270000,
P22 mean portal group 2 right portal X-reject coordinate for gantry
2
\ Abwurf_Pos_P22_y \
333000,
Yreject coordinate for gantry 2
\ Max_Abhol_Pos_PG1P1_y
\
1482500,
Minimum Y-position gantry axis Y4 can move to without placement enable
\ Max_Abhol_Pos_PG1P2_y
\
422200,
Maximum Y-position gantry axis Y1 can move to without placement enable
\ Max_Abhol_Pos_PG2P1_y \
1282500,
minimum position without placement enable for Y-gantry 3. because of 180° turned
gantries in BB2 is this value different to ganty 4
\ Max_Abhol_Pos_PG2P2_y \
422200,
maximum position without placement enable for Y-gantry 2. because of 180° turned
gantries in BB2 is this value different to ganty 1
\ RuestPosition_P1_x \
600000,
X
1-set up position. X-set up position could be anywhere
\ RuestPosition_P1_y \
780000,
Y1-set up position. Y-set up positions are definetly in the placement area. Therefor
the gantry move in slow motion to this coordinates.
\ RuestPosition_P2_x \
1400000,
X
2-set up position. X-set up position could be anywhere
\ RuestPosition_P2_y \
740000,
Y2-set up position. Y-set up positions are definetly in the placement area. Therefor
the gantry move in slow motion to this coordinates.
\ RuestPosition_P3_x \
1400000,
X
3-set up position. X-set up position could be anywhere
\ RuestPosition_P3_y \
1130000,
Y3-set up position. Y-set up positions are definetly in the placement area. Therefor
the gantry move in slow motion to this coordinates.
\ RuestPosition_P4_x \
600000,
X
4-set up position. X-set up position could be anywhere
\ RuestPosition_P4_y \
1200000,
Y4-set up position. Y-set up positions are definetly in the placement area. Therefor
the gantry move in slow motion to this coordinates.
\ ParkPosition_Offset_x \
100000,
offset from the SW-Limits to operate the gantries in a save way with SITEST
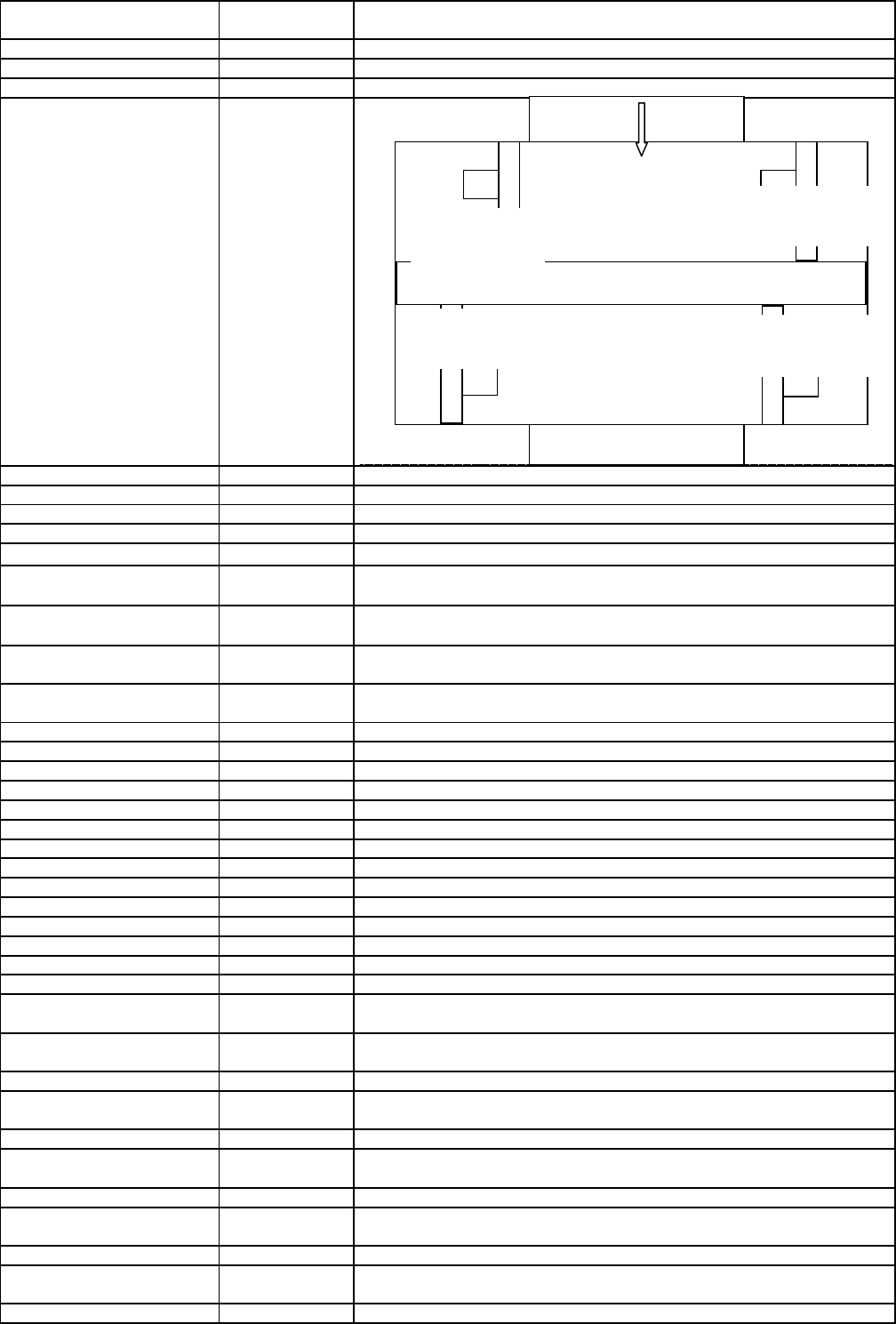
working area BB 1
working area BB 2
Gantry 4 is
Gantry P1 at
Portalgroup PG1
S20 ä
Gantry 1 is
gantry P2 at
Portalgroup PG1
Gantry 2 is
Gantry P2 at
Portalgroup PG2
S20 ä
Gantry 3 is
Gantry P1 at
Portalgroup PG2
S20 ähl i
Edition 1.0 1 REAL_MA_e.xls REAL.MA SD EA1 S GC Training