HS50_advance_level 1_20200522_221201 (1).pdf - 第75页
Studen t Guide HS-50 A dvanced I 06/200 2 Edition 3 Machi ne Refere nce Run 7 3.5 Prep aring Z-a xis referenc e run Fig . 3 .5 - 1 Preparing Z-axi s re fere nce run 3.6 Initializ ation (refer ence r un) of the st a r axi…
06/2002 Edition Student Guide HS-50 Advanced I
3 Machine Reference Run
6
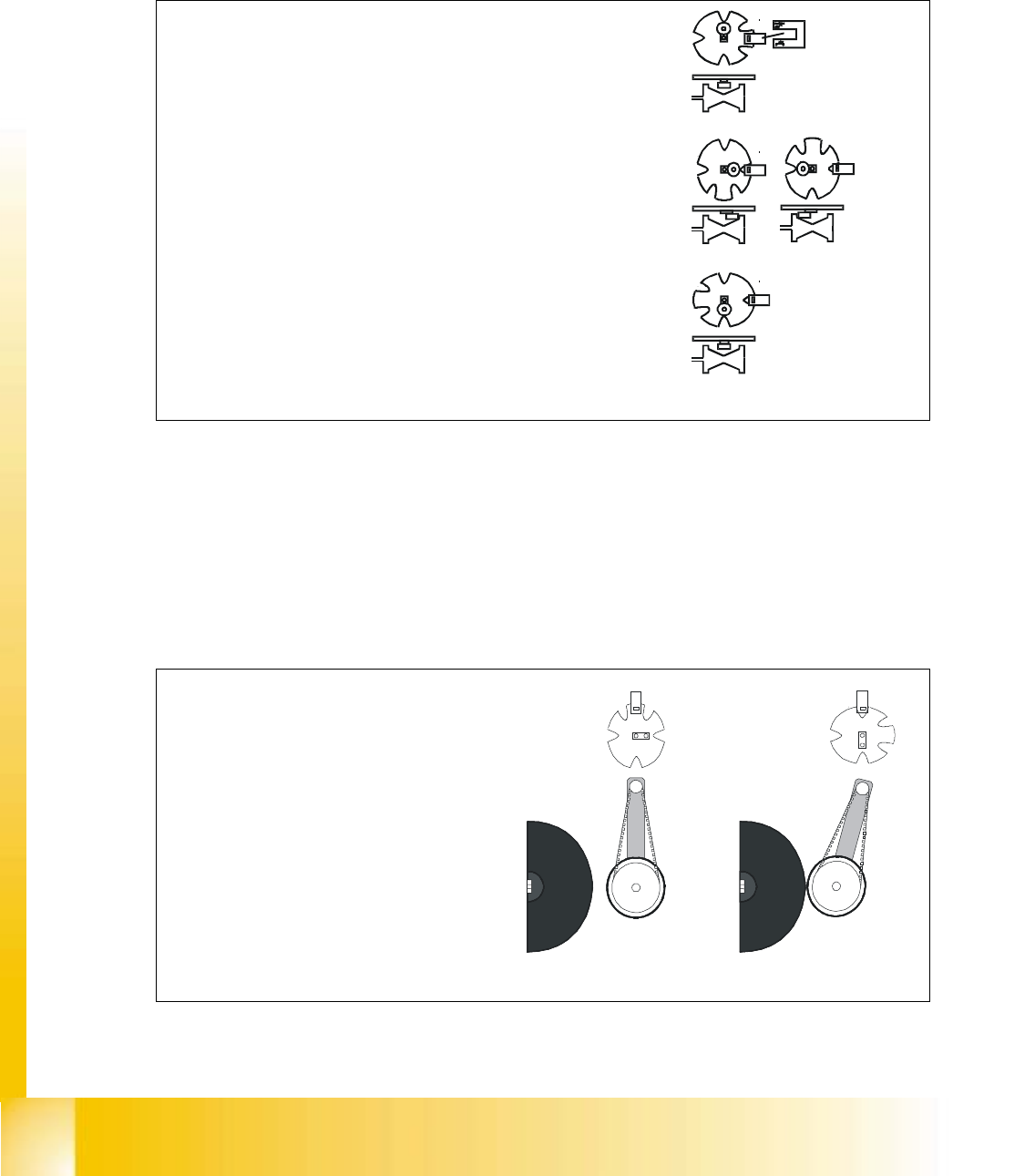
3.3 Initialization of the valve drives in pick up / place-
ment and reject position
Fig. 3.3 - 1 Initialization of the valve drives in pick up / placement and reject position
3.4 Initialization of the swivel in / out drive of the
DP_Station
Fig. 3.4 - 1 Initialization of the swivel in / out drive of the DP_Station
Ø
The stepper motor of the valve drive is turned to the
home position.
The stepper motor runs and the light barrier on the
cam disk sets the end signal.
Because of the special shape of the cam disk the
stepper motor is able to recognize the home position
see figure 1.
Ø
Figure 2a. shows position of cam disk when switching
to vacuum.
Ø
Figure 2b. shows position of cam disk when switching
to air kiss.
Ø
During any star movement the excentric is moved off
the valve plunger. This can either be on the home
position or on the oposide position like shown in
figure 3.
1.
2a.
3.
2b.
Ø
The stepper motor of the swivel in / out
drive is turned to the home position.
The stepper motor runs and the light
barrier on the cam disk sets the end
signal.
Because of the special shape of the cam
disk the stepper motor is able to
recognize the home position, seefigure 1.
Ø
Figure 2. Shows the position of the cam
disk when a nozzles is to be moved.
Ø
Diffenrently to the cam disk of the valve
drives here the home position is also the
position when operating the DP servo
1.
2.
Student Guide HS-50 Advanced I 06/2002 Edition
3 Machine Reference Run
7
3.5 Preparing Z-axis reference run
Fig. 3.5 - 1 Preparing Z-axis reference run
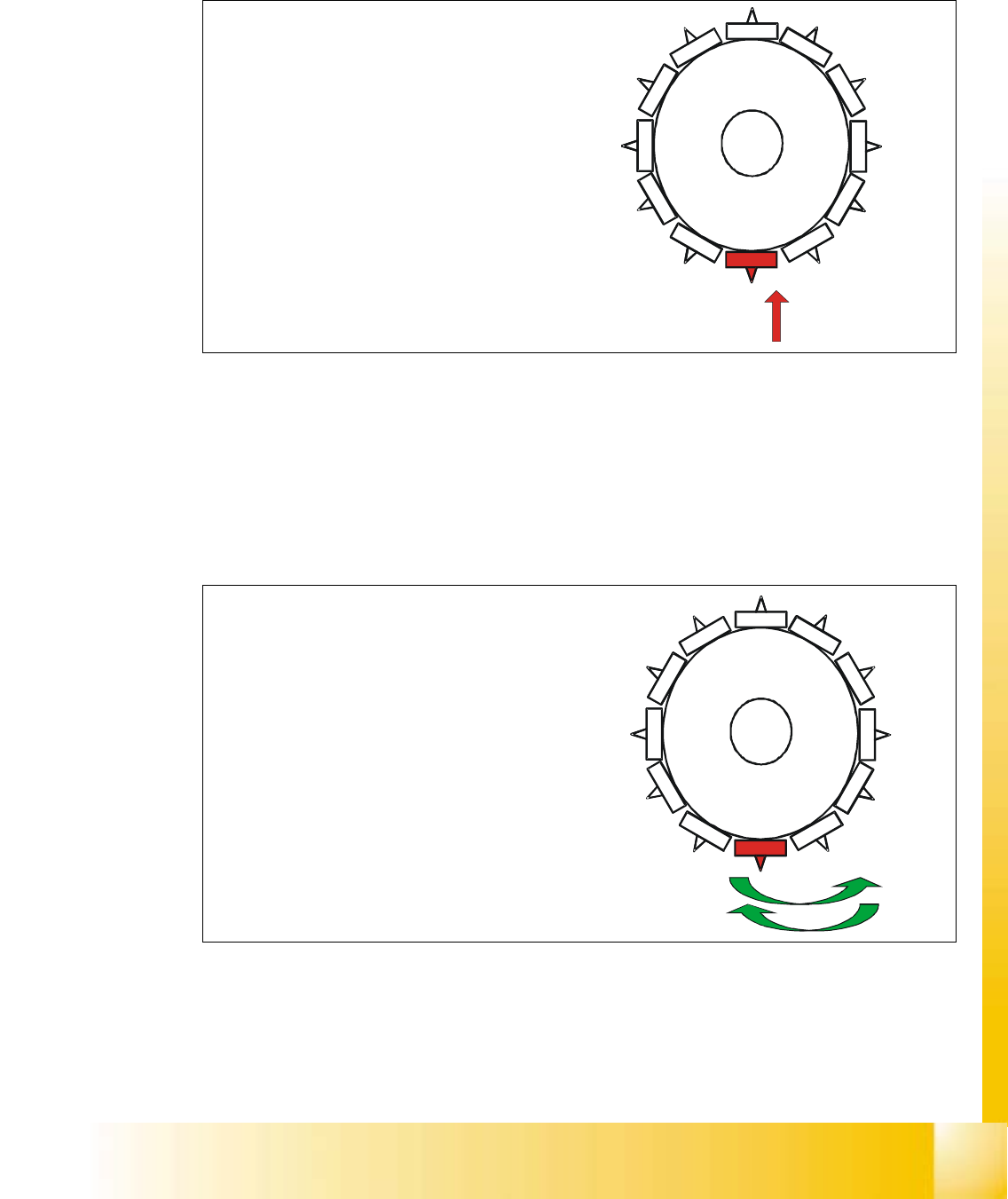
3.6 Initialization (reference run) of the star axis
Fig. 3.6 - 1 Initialization (reference run) of the star axis
Ø
The Z - Axis runs to uppermost end stop.
When stand still is detected the Z- Axis runs
to the 27 Digit position with reduced force.
Ø
This Z-axis position with reduced force
enables the placement star to move into
reference position.
Ø
The reference run is completed after the
Star axis reference.
2
3
4
5
6
7
8
9
10
1
1
1
2
1
Ø
Commutation position search for Star axis
motor (description see X- / Y-axis)
Ø
The Star axis turns counter clockwise to
zero point pulse of the incremental shaft
encoder. The zero point correction is
loaded. The Star axis turns clockwise until
the position counter shows 0 digit.
Ø
Segment number 1 is now in pick up- /
placement position.
Possible turning directions
2
3
4
5
6
7
8
9
10
1
1
1
2
1
06/2002 Edition Student Guide HS-50 Advanced I
3 Machine Reference Run
8
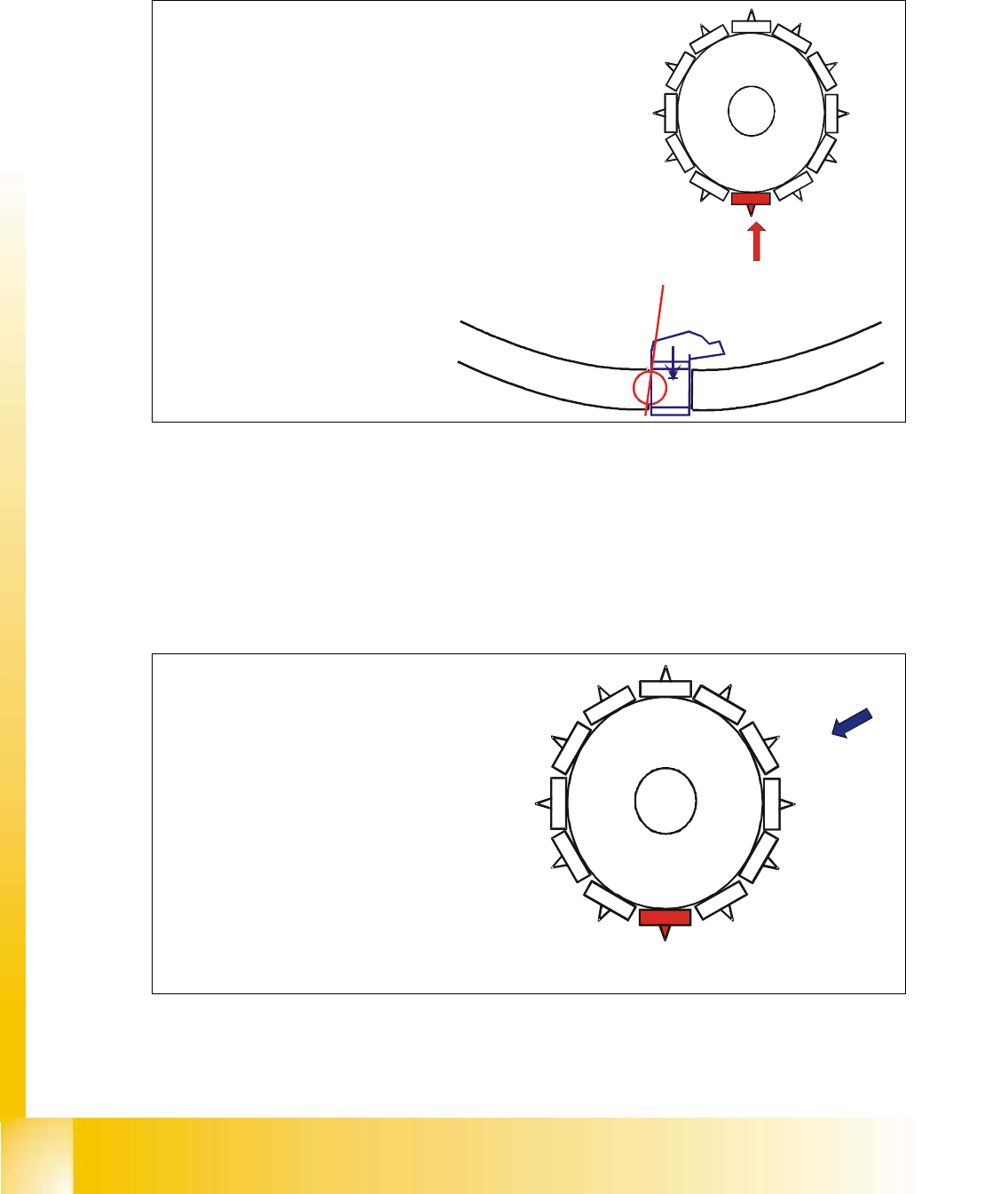
3.7 Completion of the Z axis reference run
Fig. 3.7 - 1 Completion of the Z axis reference run
3.8 Initialization (reference run) of the DP-axis
Fig. 3.8 - 1 Initialization (reference run) of the DP-axis
Ø
The Z - Axis moves to uppermost end stop.
Ø
Star axis turns to 2500 digit. The segment ball bearing is
now exactly between Z-claw and circular guidance.
Ø
Z-axis moves to the upper end stop and takes the position.
The same is done at the lower end stop, see figure 1.
The average value of these results is calculated and with a
minus sign loaded as the new reference value ( ZPC ) to
the axis controller.
Ø
After the star axis is moved back to reference position the
Z- axis starts another reference run with this new value.
2
3
4
5
6
7
8
9
10
1
1
1
2
1
1.
2
3
4
5
6
7
8
9
10
1
1
1
2
1
Ø
The sleeve in the DP station is turned to
reference position.
Ø
Sequence: the DP-Station swivels in. The axis
starts and searches for the zero pulse.
The Zero pulse is checked on failure. The DP
station swivels out after the end signal.
Ø
The swiveling function is controlled by the
CAN-BUS.
Ø
Turning the sleeve is controlled by the axis
controller.
Ø
The zero point correction on the DP-axis is
always 0 ( because up to 12 segments are
operated by 1 drive ).