HS50_advance_level 1_20200522_221201 (1).pdf - 第77页
Studen t Guide HS-50 A dvanced I 06/200 2 Edition 3 Machi ne Refere nce Run 9 3.9 X- and Y - Commut a tion p osition se arch Fig. 3.9 - 1 X- an d Y - Com mut atio n posi tio n searc h 3.10 Initia lization (r eference run…
06/2002 Edition Student Guide HS-50 Advanced I
3 Machine Reference Run
8
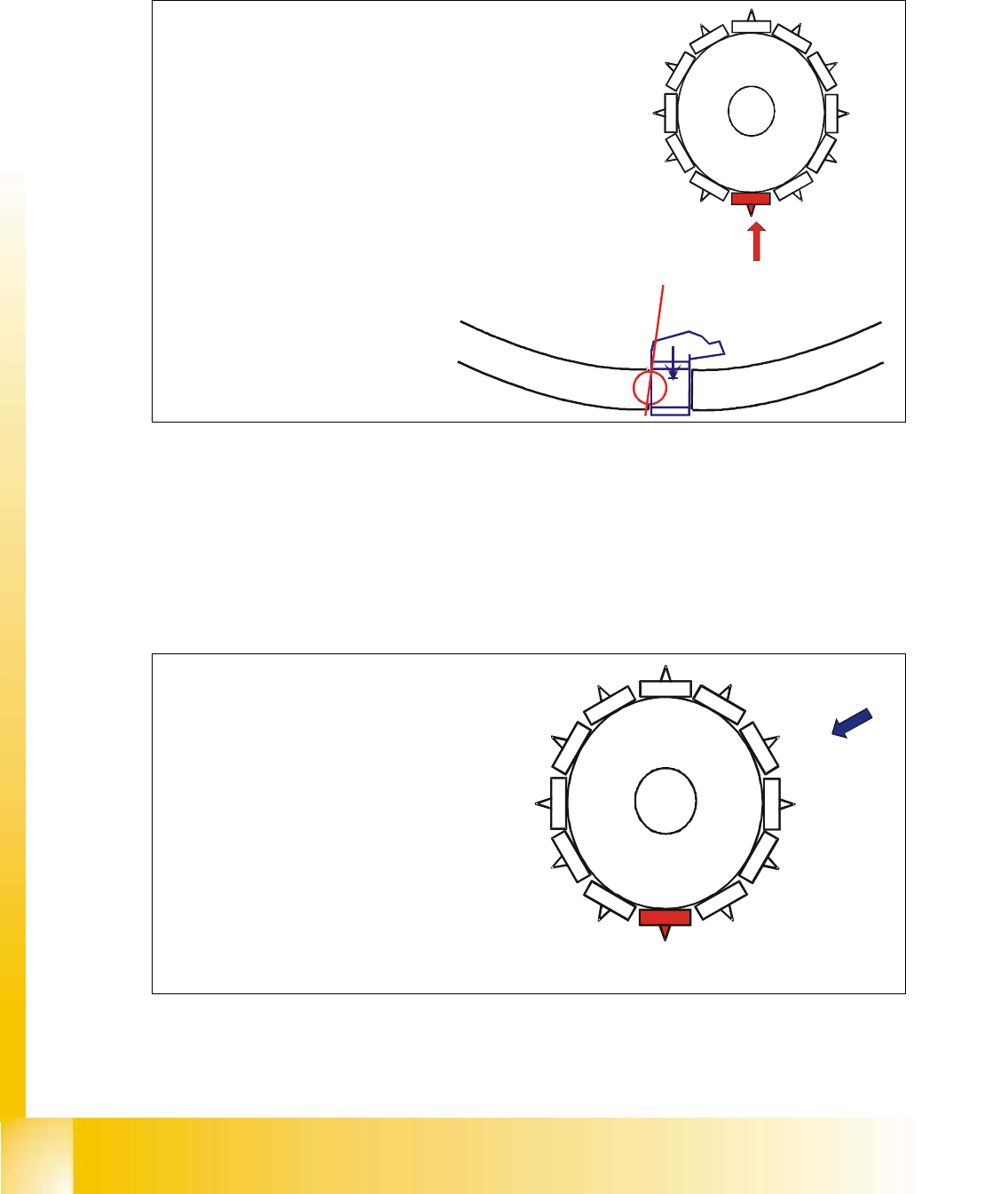
3.7 Completion of the Z axis reference run
Fig. 3.7 - 1 Completion of the Z axis reference run
3.8 Initialization (reference run) of the DP-axis
Fig. 3.8 - 1 Initialization (reference run) of the DP-axis
Ø
The Z - Axis moves to uppermost end stop.
Ø
Star axis turns to 2500 digit. The segment ball bearing is
now exactly between Z-claw and circular guidance.
Ø
Z-axis moves to the upper end stop and takes the position.
The same is done at the lower end stop, see figure 1.
The average value of these results is calculated and with a
minus sign loaded as the new reference value ( ZPC ) to
the axis controller.
Ø
After the star axis is moved back to reference position the
Z- axis starts another reference run with this new value.
2
3
4
5
6
7
8
9
10
1
1
1
2
1
1.
2
3
4
5
6
7
8
9
10
1
1
1
2
1
Ø
The sleeve in the DP station is turned to
reference position.
Ø
Sequence: the DP-Station swivels in. The axis
starts and searches for the zero pulse.
The Zero pulse is checked on failure. The DP
station swivels out after the end signal.
Ø
The swiveling function is controlled by the
CAN-BUS.
Ø
Turning the sleeve is controlled by the axis
controller.
Ø
The zero point correction on the DP-axis is
always 0 ( because up to 12 segments are
operated by 1 drive ).
Student Guide HS-50 Advanced I 06/2002 Edition
3 Machine Reference Run
9
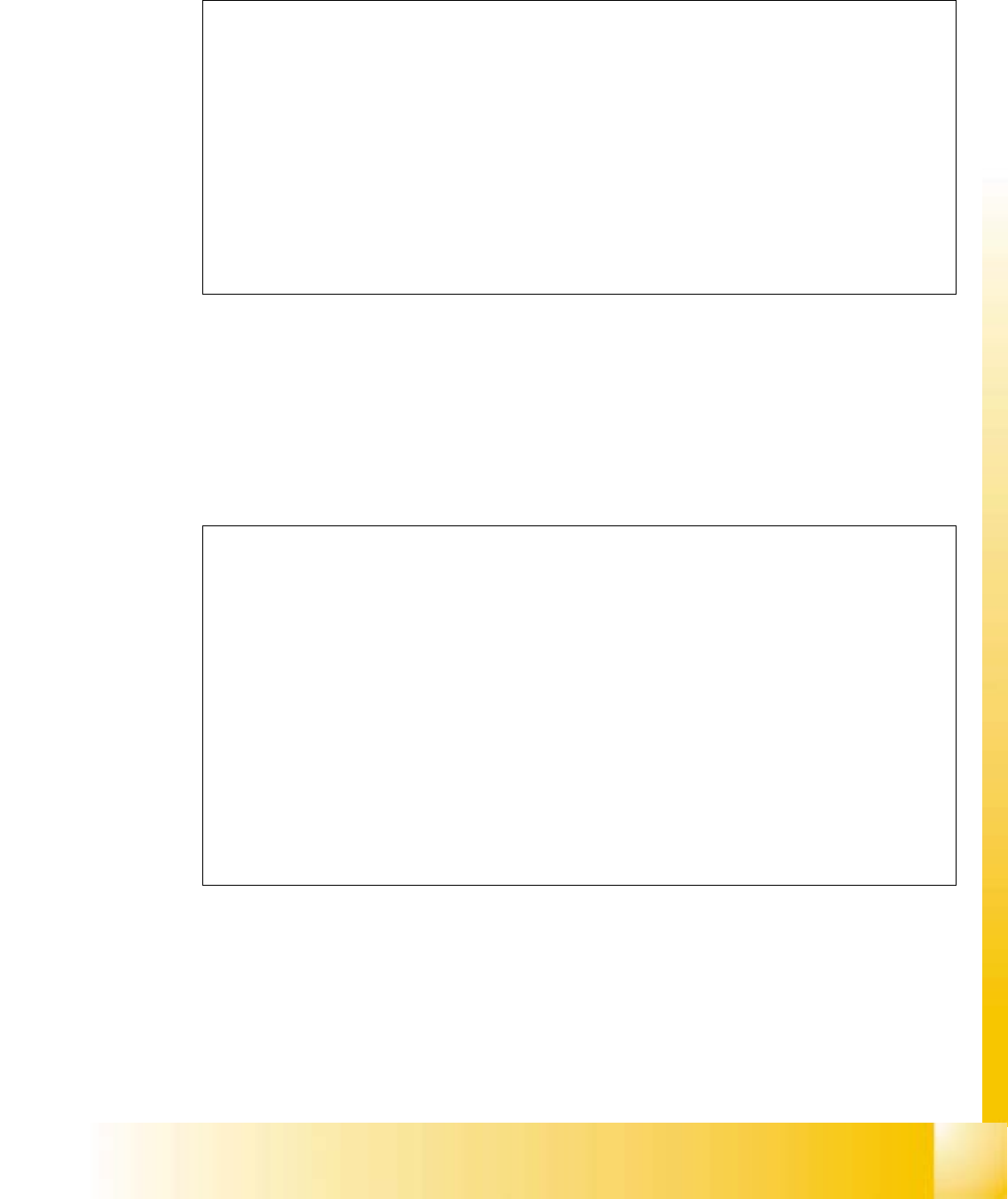
3.9 X- and Y- Commutation position search
Fig. 3.9 - 1 X- and Y- Commutation position search
3.10 Initialization (reference run) of X- and Y- axis
Fig. 3.10 - 1 Initialization (reference run) of X- and Y- axis
Ø
A commutation position search for the 3 phases AC-drives on the
g
antr
y
starts ri
g
ht after the
head axis reference run is succesfully finished.
(
A 3 phase motor move on and on when the current is switched from 1 phase to the next one, at
the correct time and in the correct sequence).
Ø
First one of the phases is connect to the power supply. With the incremental encoder the
movement is measured.
Ø
Than the current is switched to the next phase and this movement is measured too. The
machine repeat this to control the measurement values.
Ø
This axis mode of commutation position search for the digital axis controller seams like a
”uncontrolled” shaking.
Ø
After the commutation is detected both axes start parallel their reference run.
Ø
Due to the linear incremental encoder system the sequence is a little different to the Star
head.
Ø
The reference run is done with a defined limit switch and the incremental encoder.
Ø
First the gantry axes move to the reference proximity switch.
Ø
If the switching position is detected the direction of movement is reversed and the Zero pulse
signal search starts.
Ø
When the zero pulse is detected the zero point correction is loaded to the axis controller.
Reference run is completed.
Ø
The reference run for all axis is now finished. The vacuum reference run starts now.
06/2002 Edition Student Guide HS-50 Advanced I
3 Machine Reference Run
10
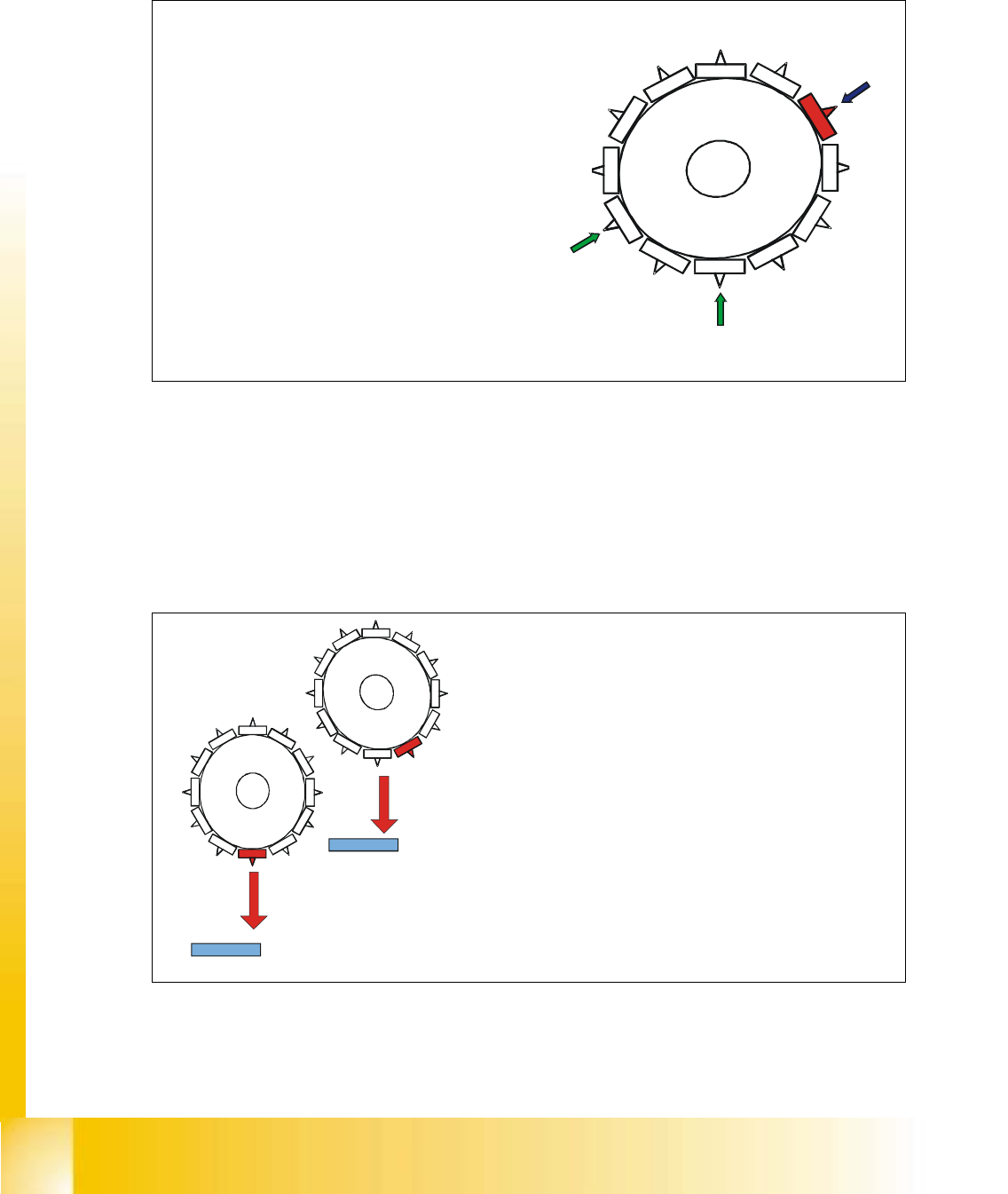
3.11 Vacuum check and all nozzle turned to 0°
Fig. 3.11 - 1 Vacuum check and all nozzle turned to 0°
3.12 Hight reference run
Fig. 3.12 - 1 Hight reference run
Ø
First of all the revolver head is moved to the
reject position by the gantry axes.
Ø
Whilst the star axis is indexing during the first
head cycle the DP station is swiveled in and
turns each segment to 0° position, figure 1.
Ø
Parallel to turning all nozzle the vacuum check is
operated.
Ø
The air kiss valve is opened and at the same time
the valve drive for the reject position is activated
and switches between open and closed. Anything
on the nozzle is rejected.
Ø
During the second head cycle the vacuum values
at the Pick up / Placement station are measured.
Ø
These are the reference values for each segment
for the vacuum checks during placement.
2
3
4
5
6
7
8
9
1
0
1
1
12
1
2.
3.
1.
2
3
4
5
6
7
8
9
10
1
1
1
2
1
2
3
4
5
6
7
8
9
1
0
1
1
12
1
Ø
Finall
y
the
g
antr
y
moves the placement heads above
the fixed transport rail.
Ø
The Z-axis runs down, and all segments touch the
transport rail.
Ø
The correct fitting on the sleeve and the nozzle type
is tested.
Ø
nozzle 1 defines the reference length.
Ø
All segments are measured according to there
specific length.
Ø
Exception: special nozzle with type number X9X
Ø
The maximum length tolerance is 0,4 mm:
If the length difference is too high an error message
is displayed.
Ø
The nozzle length is taken to calculate the placement
height for the following placements.
Ø
The gantries of one placement area work only for
this measurement sequentially.