KE-2050-KE-2060 使用说明书.pdf - 第343页
第1部 基本篇 第4章 生产程序制作 元件种类 测定位置 测定高度 SOT レーザ測定位置 モールド部 部品高さ t -γ -r r=0.25 SOP HSOP 元件高度 模部 r 激光测定位置 レーザ測定位置 モールド部 部品高さ t -0.7t -0.7×t SOJ 元件高度 模部 激光测定位置 激光测定位置 レーザ測定位置 モールド部 部品高さ t -0.65t -0.65×t QFP 模部 元件高度 激光测定位置 レーザ測定位置…
第1部 基本篇 第4章 生产程序制作
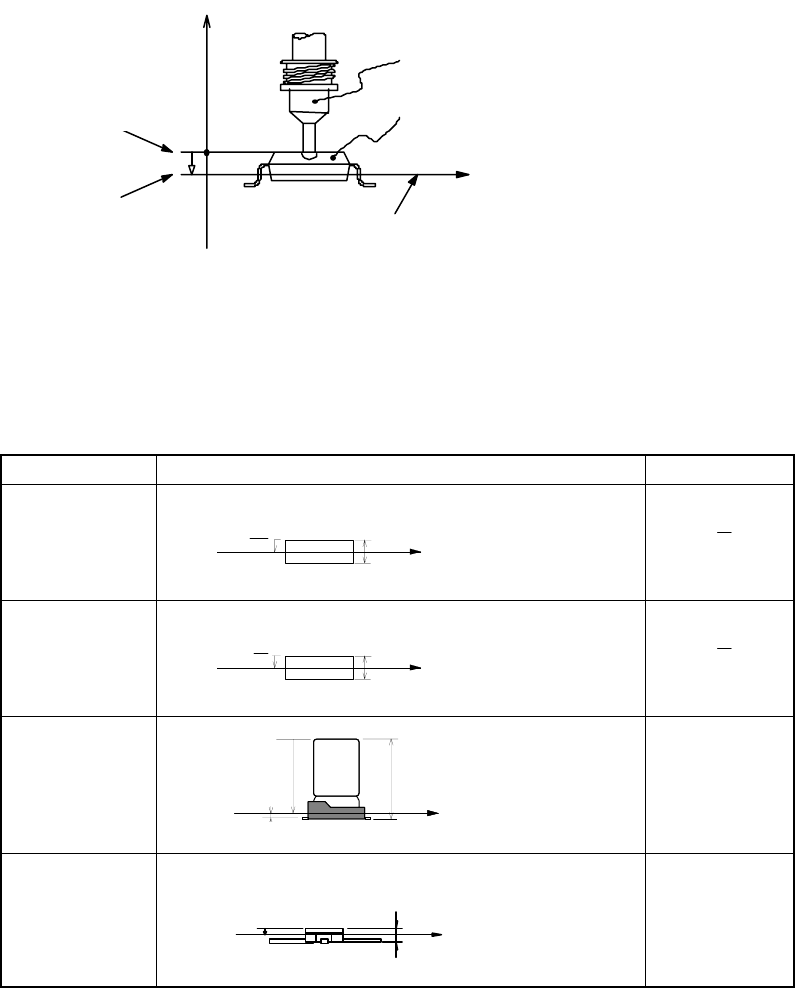
4) 激光高度
设置激光定心时的测量高度。输入从吸嘴顶端到激光照射到的测量位置的距离。
虽然根据元件高度与元件种类将自动决定初始值,但有时根据元件的不同(激光测定位置为圆
筒形或透明时等),需要改变初始值。请设置可进行稳定识别的高度。
激光
元件
吸嘴
+Z
激光高
吸嘴高度
0
-Z
-Z
-Z
吸嘴
元件
激光
激光高度
吸嘴高度
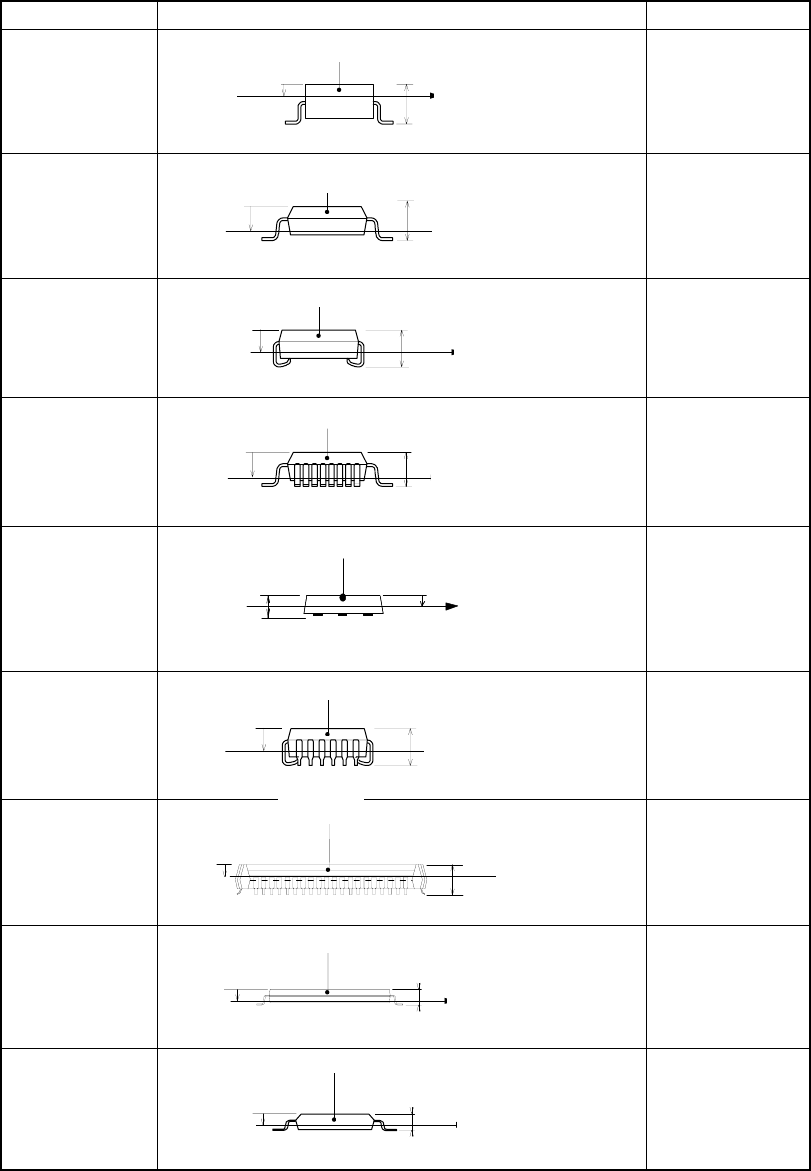
◆ 默认值
激光高度的默认值有时根据元件的种类和高度来设置。下表给出了元件种类和激光高度的默
认值的关系。
表 4-3-5-2-4 元件种类和激光高度的默认值的关系
元件种类 测定位置 测定高度(mm)
方形芯片
レーザ測定位置
部品高さ
t
t
-−
2
2
t
-
−
圆筒形芯片
レーザ測定位置
部品高さ
t
t
-−
2
2
t
-
−
铝电解电容器
2
t
2
t
元件高度 t
激光测定位置
激光测定位置
元件高度 t
レーザ測定位置
部
t
β
-(t-β)
品高さ
-(t-β)
β=0.45
GaAsFET
β
t
2
t
2
-(t-β)
元件高度 t
激光测定位置
β
部品高さ
t
レーザ測定位
置
-0.5
-0.5
激光测定位置
元件高度
(
继续
)
4-60
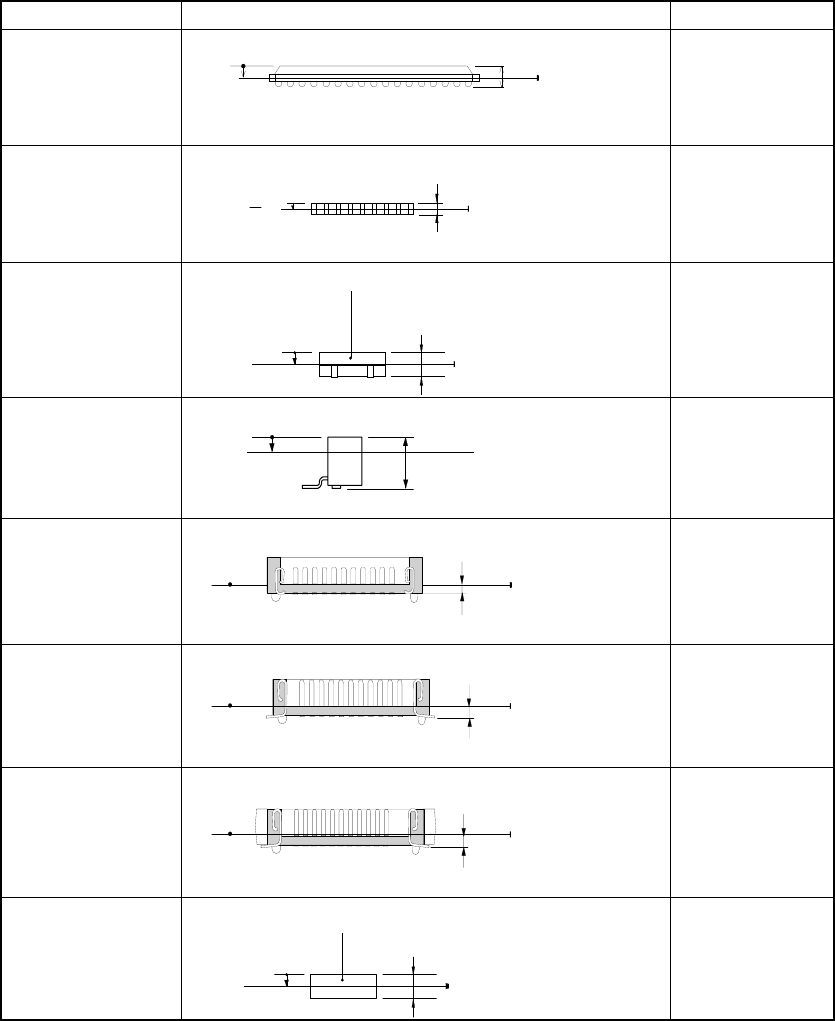
第1部 基本篇 第4章 生产程序制作
元件种类 测定位置 测定高度
SOT
レーザ測定位置
モールド部
部品高さ
t
-γ
-r
r=0.25
SOP
HSOP
元件高度
模部
r
激光测定位置
レーザ測定位置
モールド部
部品高さ
t
-0.7t
-0.7×t
SOJ
元件高度
模部
激光测定位置
激光测定位置
レーザ測定位置
モールド部
部品高さ
t
-0.65t
-0.65×t
QFP
模部
元件高度
激光测定位置
レーザ測定位置
モールド部
部品高さ
t
-0.7t
-0.7×t
QFN
レーザ測定位置
モールド部
部品高さ
t
-0.5t
-0.5×t
QFJ(PLCC)
レーザ測定位置
モールド部
部品高さ
t
-0.65t
-0.65×t
PQFP(BQFP)
模部
元件高度
激光测定位置
模部
元件高度
激光测定位置
模部
元件高度
激光测定位置
モールド部
レーザ測定位置
部品高さ
t
-0.45t
-0.45×t
TSOP
模部
元件高度
激光测定位置
レーザ測定位置
モールド部
部品高さ
t
-0.7t
-0.7×t
TSOP2
レーザ測定位置
モールド部
部品高さ
t
-0.7t
-0.7×t
模部
元件高度
激光测定位置
激光测定位置
模部
元件高度
(
继续
)
4-61
第1部 基本篇 第4章 生产程序制作
元件种类 测定位置 测定高度
BGA
FBGA
レーザ測定位置
部品高
t
さ
-0.86t
-0.86×t
网络阻抗
元件高度
激光测定位置
レーザ測定位置
さ
t
部品高
-−
2
t
与圆筒形芯
片相同
微调电容器
元件高度
t
激光测定位置
レーザ測定位置
さ
t
部品高
モールド部
-(t - 0.7)
- (t - 0.7)
单向引脚连接器
双向引脚连接器
Z 形脚连接器
レーザ測定位置
部品高さ
t
-1.0
- 1.0
J 引脚插座
2
元件高度
模部
元件高度
激光测定位置
激光测定位置
レーザ測定位置
さ
t
部品高
0
0
鸥翼式插座
元件高度
激光测定位置
レーザ測定位置
さ
t
部品高
0
0
带减震器的插座
元件高度
激光测定位置
レーザ測定位置
さ
t
部品高
0
0
其它元件
元件高度
激光测定位置
モールド
レーザ測定位置
さ部品高
t
部
-0.5t
-0.5×t
模部
元件高度
激光测定位置
4-62