KE 2050 2060说明书.pdf - 第198页
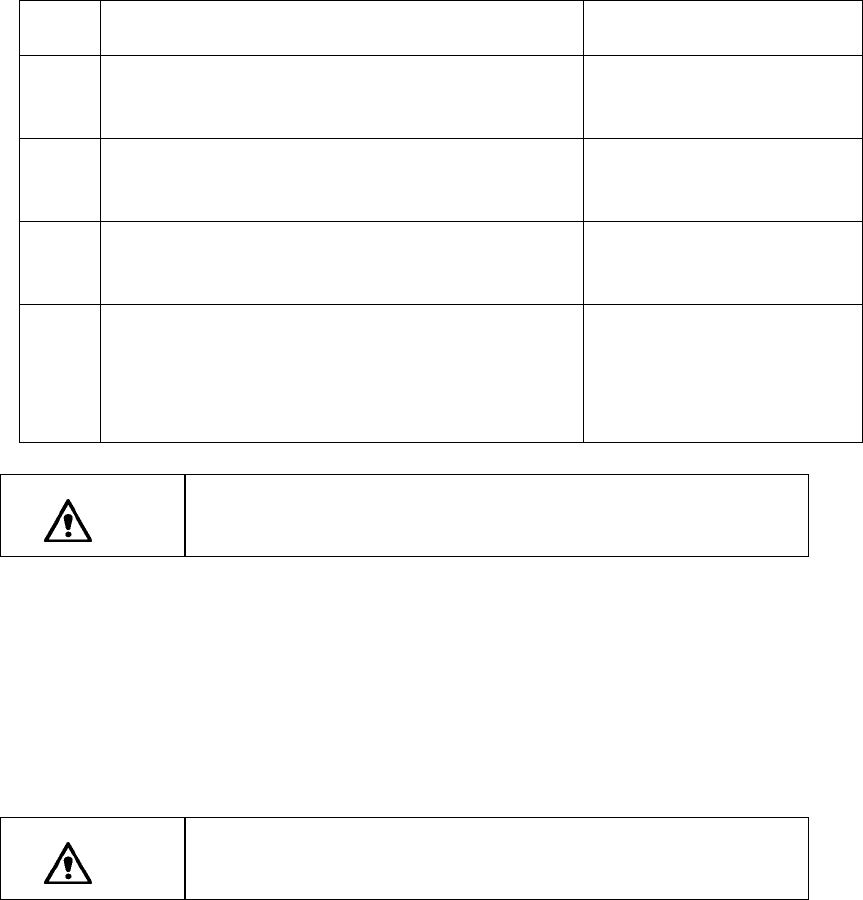
第4章 生产程序制作 Rev00 ●激光定心的流动 A D d X B C d Y E A D d X B C d Y E (-) 旋转 位置偏移 (dX、 dY) 角度偏移 (dθ) 修正后贴片 测量途中阴幅达到最小 ③④ 检测出。 这里已经知道喷嘴中心从与零件中 心的差距 Y方向偏移 dX X方向偏移 dy 可以判断。 同时 ③ 或者 ④ 上的 θ马达也在运转 可知角度偏 dθ。 θ轴(+)方向旋转、 激光线开始测量 下面(-)方向…
第4章 生产程序制作 Rev00
5)激光识别十进制
激光识别用十进制可以指定。主要用途如下。
参见“激光线定心的流动”。
十进
制
操作 用 途
1 阴幅最小的边(第1最小阴 A)检测,从最小幅边
向 +90°位置旋转,最小幅(第2最小阴 B)检测,
位置偏移,开始角度校正,贴片。
芯片元件
2 阴幅最小的边(第1最小阴 A)检测,从最小幅边
向 + 方向用激光让其旋转,最小幅(第2最小阴 B)
检测,位置偏移,开始角度校正,贴片。
SOP 等带导线的元件
3 吸取姿势检测阴(第1最小阴 A)し,检测的边向
+90°位置旋转,最小幅(第2最小阴 B)检测,开
始位置偏移校正,贴片。
用在没有角的圆筒形元件。
这种情况下,忽略角度(忽
略极限),指追求元件中心。
0 激光定心不实施(只确认是否有元件),吸取姿势旋
转贴片角度贴片。
激光定心是不安定的元件
(极端薄小的元件)中使用
的。定心不实施贴片。由此,
贴片位置给吸取位置带来影
响
注意
十进制由元件种类决定初始值。通常变更带来更高的错误发生率。
特殊情况以外一定不要变更。
6)角度
吸取的激光识别元件在定心前旋转多少(角度)的设定。
外形尺寸初始输入时设定初始值。外形尺寸变更时,初始值不设定。
初始值 30°(0603 元件才有 40°)设定。变更后定心的安定性改变(大多数情况下,定心变
得不安定)。
注意
影响贴片精度只要没有从 JUKI 来的指示一定不要变更。
4-53
第4章 生产程序制作 Rev00
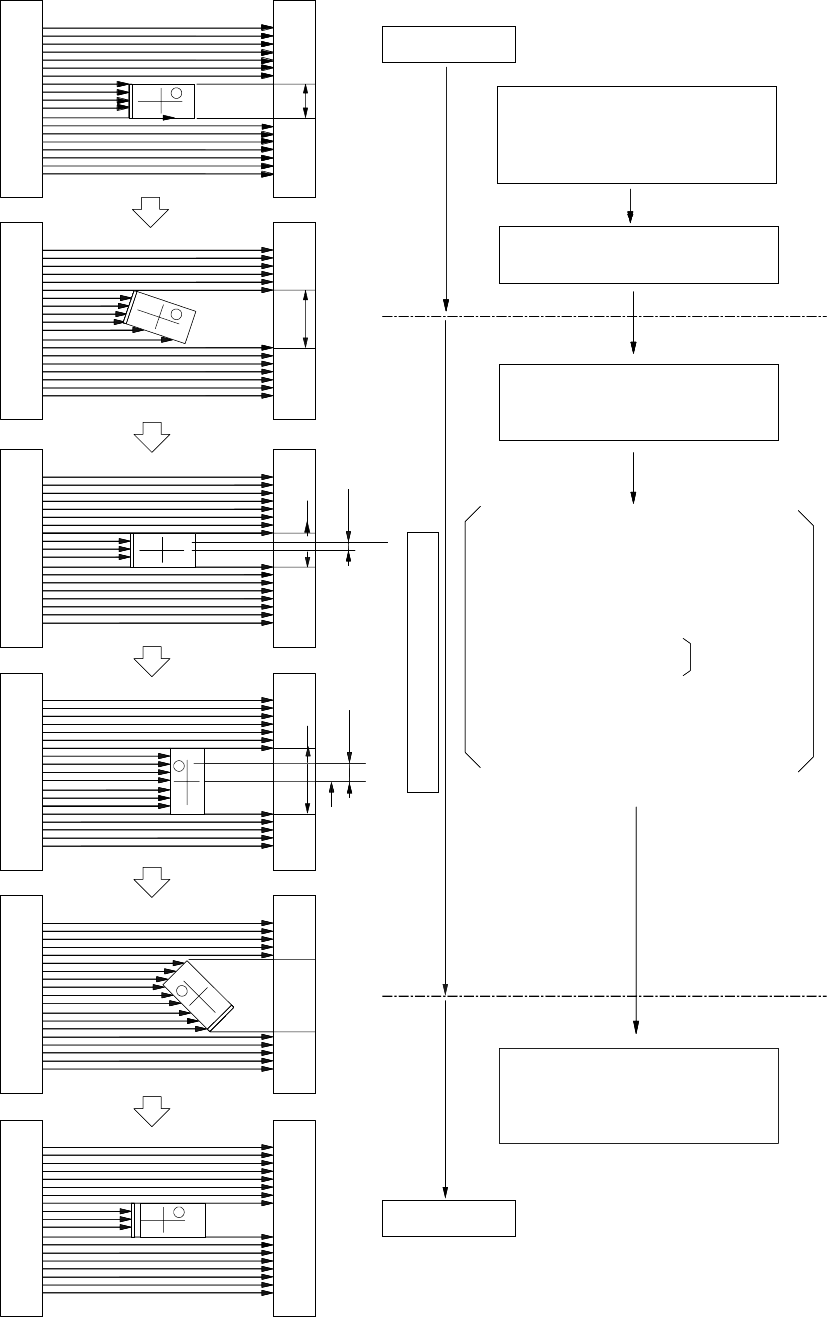
●激光定心的流动
A
D
d X
B
C
d Y
E
A
D
d X
B
C
d Y
E
(-) 旋转
位置偏移 (dX、 dY)
角度偏移 (dθ)
修正后贴片
测量途中阴幅达到最小 ③④
检测出。
这里已经知道喷嘴中心从与零件中
心的差距
Y方向偏移 dX
X方向偏移 dy 可以判断。
同时 ③ 或者 ④ 上的
θ马达也在运转
可知角度偏 dθ。
θ轴(+)方向旋转、
激光线开始测量
下面(-)方向θ旋转
(回旋)
贴片
修
正
激光线测量
(元件中心)
(吸嘴中心)
Z 轴的驱动使得其吸收元件、激光
线高度与元件配合
回旋
元件吸取
修正
(+) 旋转
(+) 旋转
(+) 旋转
(回旋)
①
②
③
④
⑤
⑥
4-54
第4章 生产程序制作 Rev00
7) MTC/MTS/DTS
●MTC速度: 可指定滑梭的动作速度。如果使速度变慢,则向主体的元件供给会变得稳定,但
生产速度会变慢。
●吸取: 可指定MTC吸取侧垫片的种类(大、小)。
●滑梭: 可指定MTC滑梭侧垫片的种类(大、小、机械)。
※ 当为BGA等球形元件时,由于不能在ΜTC滑梭的垫片上吸取(使用真空),因此,使用机
械吸取(夹住元件外形)。
※ 在“附加信息”标签的“元件废弃”中设置了“返回托盘”时,不能选择“机械”项。
◆ MTC垫片的初始值
画面标记 默认值
吸取 ·元件尺寸的纵横方向的短边
不足 16mm 时 :小
超过 16mm 时 :大
滑梭 ·元件种类为 BGA 时 :机械
·元件种类为 BGA 以外时,元件尺寸的纵横方向的短边
不足 16mm 时 :小
超过 16mm 时 :大
●MTS速度: 可指定MTS托盘的拉出速度。
●DTS速度: 可指定DTS托盘的拉出速度。
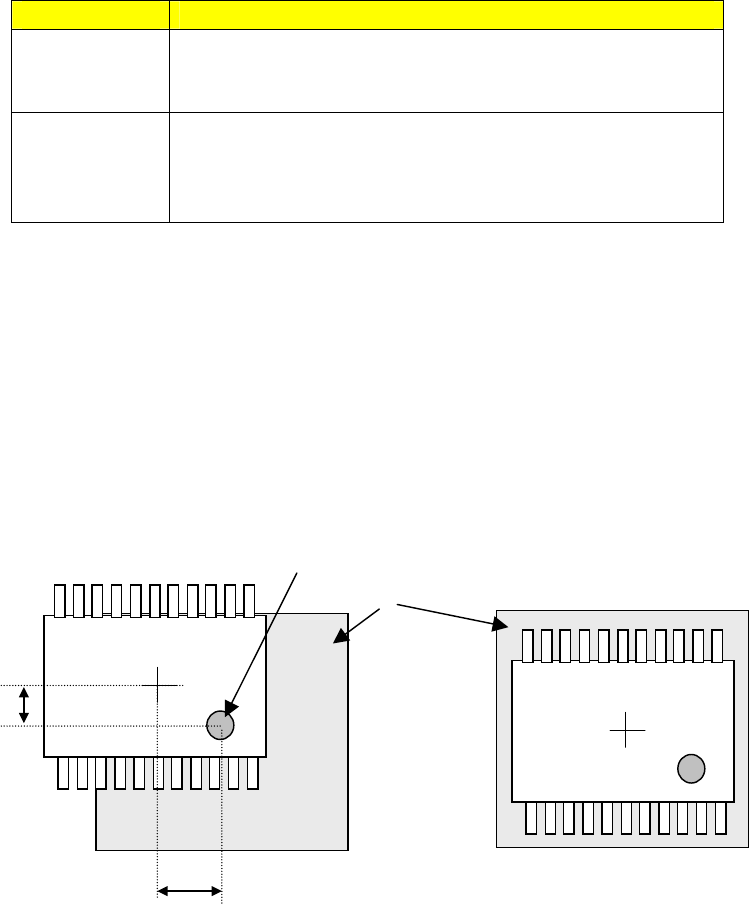
8) 识别中心偏移值(仅 KE-2060 可输入)
图像定心是通过将吸取中心位置(通常是元件中心位置)移动到VCS的中心位置来进行。
但象MCM(Multi Chip Module)之类的元件,因不能吸取元件中心,如果超出VCS视角范围时,
将不能进行图像定心。此时,可通过输入如下图的偏移值(a、b),使识别得以正常进行。
吸取中心位置=VCS 中心位置
b
⇒
VCS(的视角)
(俯视图)
a
4-55